技术特征:
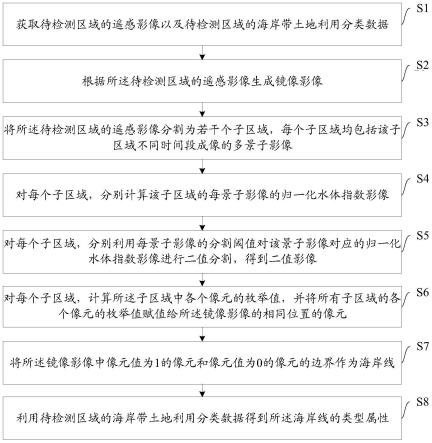
1.一种海岸线自动化识别方法,其特征在于,所述方法包括:s1:获取待检测区域的遥感影像以及待检测区域的海岸带土地利用分类数据;其中,所述待检测区域的遥感影像包括该待检测区域不同时间段成像的多景遥感影像;s2:根据所述待检测区域的遥感影像生成镜像影像;其中,所述镜像影像的影像四至范围、影像宽度、影像高度、像元大小、坐标系均与所述待检测区域的遥感影像相同,所述镜像影像的各个像元的初始值为空;s3:将所述待检测区域的遥感影像分割为若干个子区域,每个子区域均包括该子区域不同时间段成像的多景子影像;s4:对每个子区域,分别计算该子区域的每景子影像的归一化水体指数影像;其中,所述归一化水体指数影像在像元(x,y)处的像元值为对应的子影像在该像元(x,y)处的归一化水体指数ndwi;ndwi=(p(green)-p(nir))/(p(green) p(nir));p(green)和p(nir)分别为所述子影像在像元(x,y)处的绿波段光谱值和近红外波段光谱值;s5:对每个子区域,分别利用每景子影像的分割阈值对该景子影像对应的归一化水体指数影像进行二值分割,得到二值影像;其中,若所述归一化水体指数影像在像元(x,y)处的像元值大于对应子影像的分割阈值,则所述二值影像在该像元(x,y)处的像元值为1,否则为0;s6:对每个子区域,计算所述子区域中各个像元的枚举值,并将所有子区域的各个像元的枚举值赋值给所述镜像影像的相同位置的像元;当时,m
pixel
=1当时,m
pixel
=0其中,m
pixel
表示像元(x,y)的枚举值,n
pixel=1
表示一个子区域中所有二值影像在像元(x,y)处的像元值取值为1的数量,n
pixel=0
表示一个子区域中所有二值影像在像元(x,y)处的像元值取值为0的数量,n
pixel
=n
pixel=1
n
pixel=0
,p为设定的判读阈值系数;s7:将所述镜像影像中像元值为1的像元和像元值为0的像元的边界作为海岸线;s8:利用待检测区域的海岸带土地利用分类数据得到所述海岸线的类型属性。2.根据权利要求1所述的海岸线自动化识别方法,其特征在于,所述s8包括:s81:将所述海岸线与所述海岸带土地利用分类数据相交,得到一系列的交点;s82:在每个交点处,过所述交点做垂直于所述海岸线的线段,并且所述线段在所述海岸线两侧的长度分别为第一长度和第二长度;s83:对每一个交点,以该交点的线段作为矩形的一条边,过该交点的下一个交点做闭合矩形,得到一系列的闭合矩形区域;s84:对每个闭合矩形区域,根据所述闭合矩形区域内的海岸带土地利用分类数据确定所述闭合矩形区域的类型属性;
其中,n0和n1分别为所述第一区域和第二区域的像元数,μ0为所述第一区域的所有像元的像元值的平均值,μ1为所述第二区域的所有像元的像元值的平均值;s54:找出所有分割阈值的取值对应的所述差别的最大值,所述最大值对应的分割阈值的取值即为所述子影像的分割阈值。6.根据权利要求5所述的海岸线自动化识别方法,其特征在于,所述s1包括:s11:获取卫星遥感影像、待检测区域范围矢量和海岸带土地利用分类数据;s12:当所述卫星遥感影像、待检测区域范围矢量和海岸带土地利用分类数据的投影坐标不一致时,进行使投影坐标一致的坐标变换;s13:利用待检测区域范围矢量对所述卫星遥感影像进行裁剪,得到待检测区域的遥感影像。7.根据权利要求6所述的海岸线自动化识别方法,其特征在于,所述s7包括:s71:将所述镜像影像中像元值为1的像元合并为第一对象,将所述镜像影像中像元值为0的像元合并为第二对象;s72:将所述第一对象和第二对象的边界作为所述海岸线。8.根据权利要求7所述的海岸线自动化识别方法,其特征在于,所述方法还包括:s9:对所述海岸线进行平滑处理和拓扑检查;s10:对所述海岸线的地理空间位置、长度和各段海岸线的类型属性进行统计。9.一种海岸线自动化识别装置,其特征在于,所述装置包括:数据获取模块,用于获取待检测区域的遥感影像以及待检测区域的海岸带土地利用分类数据;其中,所述待检测区域的遥感影像包括该待检测区域不同时间段成像的多景遥感影像;镜像影像生成模块,用于根据所述待检测区域的遥感影像生成镜像影像;其中,所述镜像影像的影像四至范围、影像宽度、影像高度、像元大小、坐标系均与所述待检测区域的遥感影像相同,所述镜像影像的各个像元的初始值为空;影像分割模块,用于将所述待检测区域的遥感影像分割为若干个子区域,每个子区域均包括该子区域不同时间段成像的多景子影像;水体指数计算模块,用于对每个子区域,分别计算该子区域的每景子影像的归一化水体指数影像;其中,所述归一化水体指数影像在像元(x,y)处的像元值为对应的子影像在该像元(x,y)处的归一化水体指数ndwi;ndwi=(p(green)-p(nir))/(p(green) p(nir));p(green)和p(nir)分别为所述子影像在像元(x,y)处的绿波段光谱值和近红外波段光谱值;二值分割模块,用于对每个子区域,分别利用每景子影像的分割阈值对该景子影像对应的归一化水体指数影像进行二值分割,得到二值影像;其中,若所述归一化水体指数影像在像元(x,y)处的像元值大于对应子影像的分割阈
值,则所述二值影像在该像元(x,y)处的像元值为1,否则为0;镜像影像赋值模块,用于对每个子区域,计算所述子区域中各个像元的枚举值,并将所有子区域的各个像元的枚举值赋值给所述镜像影像的相同位置的像元;当时,m
pixel
=1当时,m
pixel
=0其中,m
pixel
表示像元(x,y)的枚举值,n
pixel=1
表示一个子区域中所有二值影像在像元(x,y)处的像元值取值为1的数量,n
pixel=0
表示一个子区域中所有二值影像在像元(x,y)处的像元值取值为0的数量,n
pixel
=n
pixel=1
n
pixel=0
,p为设定的判读阈值系数;海岸线确定模块,用于将所述镜像影像中像元值为1的像元和像元值为0的像元的边界作为海岸线;海岸线类型属性确定模块,用于利用待检测区域的海岸带土地利用分类数据得到所述海岸线的类型属性。10.根据权利要求9所述的海岸线自动化识别装置,其特征在于,所述海岸线类型属性确定模块包括:数据相交单元,用于将所述海岸线与所述海岸带土地利用分类数据相交,得到一系列的交点;线段确定单元,用于在每个交点处,过所述交点做垂直于所述海岸线的线段,并且所述线段在所述海岸线两侧的长度分别为第一长度和第二长度;闭合矩形区域确定单元,用于对每一个交点,以该交点的线段作为矩形的一条边,过该交点的下一个交点做闭合矩形,得到一系列的闭合矩形区域;闭合矩形区域类型属性确定单元,用于对每个闭合矩形区域,根据所述闭合矩形区域内的海岸带土地利用分类数据确定所述闭合矩形区域的类型属性;海岸线类型属性确定单元,用于将所述闭合矩形区域的类型属性作为所述闭合矩形区域上的两个所述交点之间的一段海岸线的类型属性,得到所述海岸线的类型属性。
技术总结
本发明公开了一种海岸线自动化识别方法和装置,属于遥感监测领域。本发明融合多景遥感影像信息层及镜像影像提取海岸线,并利用土地利用数据划分海岸线结点,判断海岸线类型属性,适用于在各种影像成像条件下的海岸线空间位置提取和属性更新。本发明解决了常规单一遥感影像受潮汐影响导致海岸线位置不确定、精度低、类型属性难以区分等缺陷,同时实现了岸线类型属性的自动化研判,提高了海岸线自动化解译的精度和时间效率。本发明能够准确、快速、自动化提取海岸线的空间位置和类型属性,为自然岸线的保护与管理提供基础数据支撑。岸线的保护与管理提供基础数据支撑。岸线的保护与管理提供基础数据支撑。
技术研发人员:毕京鹏 马万栋 申文明 张文国 吴玲 郭艳玲 史园莉 毕晓玲 陈绪慧 任致华
受保护的技术使用者:生态环境部卫星环境应用中心
技术研发日:2022.04.27
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。