技术特征:
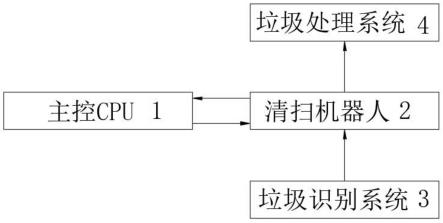
1.一种道路边缘检测的智能清扫系统,其特征在于:包括主控cpu(1)和清扫机器人(2)、垃圾识别系统(3)以及垃圾处理系统(4),所述垃圾识别系统(3)用于对道路的垃圾进行智能识别,识别后清扫机器人(2)使垃圾处理系统(4)对道路垃圾进行清扫处理;所述垃圾识别系统(3)包括图像采集模块(31)和图像预处理模块(32)、特征提取模块(33)、匹配识别模块(34)、样本库(35)以及结果输出模块(36),所述图像采集模块(31)对道路上的垃圾图像进行实时采集,采集后图像预处理模块(32)对图像进行图像滤波处理、图像增强处理以及图像边缘处理,处理后特征提取模块(33)对采集的图像特征进行提取,所述匹配识别模块(34)将样本库(35)中的垃圾与采集的图像进行识别对比,判断出是否为垃圾。2.根据权利要求1所述的一种道路边缘检测的智能清扫系统,其特征在于:所述图像采集模块(31)通过双面摄像机对道路垃圾图像进行采集,双面摄像机安装于清扫机器人(2)的前后左右位置,对地面进行全方位的垃圾图像采集工作。3.根据权利要求1所述的一种道路边缘检测的智能清扫系统,其特征在于:所述图像预处理模块(32)对图像进行图像滤波处理、图像增强处理以及图像边缘处理时,先通过低通滤波器排除图像中高频分量,使其达到降噪效果,接着通过对图像部分区域取均值进行高频分量阻隔,对图像进行二次滤波处理,之后通过灰度映射函数对图像的灰度直方图加以改变,保证每一灰度均有相同的像素点,最后利用边缘处二次导数为零的特性来分析边缘是否准确,若不准确再进行图像细化处理,找出图像的骨架结构,去除冗余信息,完成图像的预处理工作。4.根据权利要求1所述的一种道路边缘检测的智能清扫系统,其特征在于:所述匹配识别模块(34)对采集的垃圾图像进行识别时,首先利用开运算消除二值图像中细小颗粒的影响,然后计算出最大面积的连通域,之后利用闭运算填充垃圾图像内部的空洞,最后利用形态学腐蚀处理提高图像边缘检测的精度,进而精确的判断出垃圾的种类。5.根据权利要求1所述的一种道路边缘检测的智能清扫系统,其特征在于:所述垃圾处理系统(4)包括有清扫行走系统(41)和自动清扫系统(42)、降尘喷洒系统(43)、清扫警示系统(44)、清扫分类系统(45)、信息接收模块(46)、超声波传感模块(47)以及pm2.5传感模块(48),所述超声波传感模块(47)用于检测清扫机器人(2)与垃圾之间的距离以及障碍物之间的距离,所述pm2.5传感模块(48)用于对清扫过程中产生的灰尘进行实时检测,预设一个空中灰尘的范围值,然后根据预设的范围值能够判断空中的灰尘颗粒是否超标,检测后信息接收模块(46)对信息进行接收。6.根据权利要求5所述的一种道路边缘检测的智能清扫系统,其特征在于:所述超声波传感模块(47)检测到垃圾的距离时,清扫行走系统(41)会使清扫机器人(2)自动行走到垃圾的位置,然后自动清扫系统(42)对地面上的垃圾进行清理,当监测的距离为障碍物距离时,清扫警示系统(44)会判断障碍物的特征,若障碍物为无生命特征体时,清扫行走系统(41)会使清扫机器人(2)自动转向避让,若障碍物为有生命特征体时,清扫警示系统(44)会发出语音警示,使障碍物能够自行离开,语音警示内容为事先预设好,否则清扫行走系统(41)会使清扫机器人(2)进行转向避让,避免发生碰撞,所述pm2.5传感模块(48)检测到空中灰尘颗粒的数据值超过预设值时,降尘喷洒系统(43)会自动向空中喷洒水,水以雾化的形式喷出,对空中的灰尘颗粒进行降尘工作,地面垃圾清理完毕后,清扫分类系统(45)会对
垃圾进行自动分类。7.根据权利要求6所述的一种道路边缘检测的智能清扫系统,其特征在于:所述清扫分类系统(45)对垃圾进行分类时,所述清扫机器人(2)上设有可回收垃圾区和不可回收垃圾区,之后采用机械手的方式将垃圾分类放入到与其相对应的垃圾回收区内。8.一种道路边缘检测的智能清扫方法,其特征在于:包括权利要求1~7任意一项的系统,其清扫方法包括以下步骤:s1、首先图像采集模块(31)对道路上的垃圾图像进行实时采集,采集后图像预处理模块(32)先通过低通滤波器排除图像中高频分量,使其达到降噪效果,接着通过对图像部分区域取均值进行高频分量阻隔,对图像进行二次滤波处理,之后通过灰度映射函数对图像的灰度直方图加以改变,保证每一灰度均有相同的像素点,最后利用边缘处二次导数为零的特性来分析边缘是否准确,若不准确再进行图像细化处理,找出图像的骨架结构,去除冗余信息,完成图像的预处理工作,处理后特征提取模块(33)对采集的图像特征进行提取,匹配识别模块(34)将样本库(35)中的垃圾与采集的图像进行识别对比,首先利用开运算消除二值图像中细小颗粒的影响,然后计算出最大面积的连通域,之后利用闭运算填充垃圾图像内部的空洞,最后利用形态学腐蚀处理提高图像边缘检测的精度,进而精确的判断出垃圾的种类;s2、超声波传感模块(47)检测清扫机器人(2)与垃圾之间的距离以及障碍物之间的距离,pm2.5传感模块(48)对清扫过程中产生的灰尘进行实时检测,预设一个空中灰尘的范围值,然后根据预设的范围值能够判断空中的灰尘颗粒是否超标,检测后信息接收模块(46)对信息进行接收;s3、超声波传感模块(47)检测到垃圾的距离时,清扫行走系统(41)会使清扫机器人(2)自动行走到垃圾的位置,然后自动清扫系统(42)对地面上的垃圾进行清理,当监测的距离为障碍物距离时,清扫警示系统(44)会判断障碍物的特征,若障碍物为无生命特征体时,清扫行走系统(41)会使清扫机器人(2)自动转向避让,若障碍物为有生命特征体时,清扫警示系统(44)会发出语音警示,使障碍物能够自行离开,语音警示内容为事先预设好,否则清扫行走系统(41)会使清扫机器人(2)进行转向避让,避免发生碰撞,pm2.5传感模块(48)检测到空中灰尘颗粒的数据值超过预设值时,降尘喷洒系统(43)会自动向空中喷洒水,水以雾化的形式喷出,对空中的灰尘颗粒进行降尘工作,地面垃圾清理完毕后,清扫分类系统(45)会对垃圾进行自动分类。
技术总结
本发明公开了一种道路边缘检测的智能清扫系统及方法,本发明涉及道路清扫技术领域,包括主控CPU和清扫机器人、垃圾识别系统以及垃圾处理系统,所述垃圾识别系统用于对道路的垃圾进行智能识别,识别后清扫机器人使垃圾处理系统对道路垃圾进行清扫处理。该道路边缘检测的智能清扫系统及方法,通过对垃圾的图像进行实时采集,并且对采集的图像进行预处理和识别,进而能够准确无误的判断出路面的垃圾信息,然后对垃圾进行清理,合理的利用了清扫机器人的资源,提高了道路清洁的效果,且在清洁中能够合理的避让障碍物,清理完毕后,能够自动的对垃圾进行分类存放,提高了该清扫机器人的智能性。的智能性。的智能性。
技术研发人员:梁甲华 黄秀美
受保护的技术使用者:淮安永道智能科技有限公司
技术研发日:2022.04.19
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。