1.本发明涉及汽车行驶系统技术领域,特别涉及一种基于卡车改装的自主行驶驱动防滑控制系统及其控制方法。
背景技术:
2.工程道路车辆、绿化作业车辆、环卫车辆、打桩机、园林修剪机等在进行作业时,需要频繁地变更行进、倒退、停止的状态。采用传统手动变速器的汽车底盘时,作业人员的操作劳动强度大。且频繁切换状态使得汽车离合长期处于过渡接合状态,导致离合磨损迅速,机器故障率高。且采用传统的汽车底盘改造的工程道路车辆、绿化作业车辆、环卫车辆、打桩机、园林修剪机等不易于实现自动化作业,严重制约生产劳动效率。本发明提供一种线控驱动系统、驱动防滑系统及控制方法,可在原车底盘的基础上加装或改装本线控驱动行驶系统,降低了技术和人力成本,解放了劳动力,提高作业效率,利用了电机力矩可以通过电流电压较为准确获得、现代电机控制技术可以准确控制电机力矩和电机力矩响应比传统内燃机响应迅速等优点。
3.由于电机驱动转矩响应速度较快,且在低转速时能够达到峰值转矩,导致电机驱动卡车在起步或者低速行驶时相比于自身燃油驱动更容易打滑,降低作业车辆位置控制的精准度,所以对改造车辆的驱动防滑控制显得尤为重要。
4.近几年,国内一些学者对电动汽车驱动防滑控制系统展开了相关研究,如公开号为cn 112758096 a的专利申请,公开了一种基于电机转矩控制的智能驱动防滑控制系统及方法,该方法恒定电机转矩,通过驱动轮的角速度和角加速度变化判断驱动轮是否处于打滑状态,并参考驾驶员的意图,获得电机转矩控制命令,该方法通过人为判断输出电机控制转矩,没有明确的电机输出转矩计算公式,无法控制电机输出当前状态下电机最优力矩,过分依赖于驾驶员驾驶经验,通用性太差,控制过程简单易行,没有考虑不同附着系数路面对车轮最优滑转率的影响,缺乏对不同道路的适应能力。
5.公开号为cn 107298082 a的专利申请,公开了一种主动增加汽车附着力的系统及控制方法,其中装置包括控制器、常开电磁阀、储能器、减震器、轴缸和单向阀等,通过主动增加汽车附着力系统控制各个部件实现控制过程中的液压油按照设定方向流动,结合轴缸来实现在加速和紧急制动的时让汽车减震器弹簧收缩,增加汽车的附着力从而实现更加安全的制动以及更加快速的加速,并且系统可以重复使用自动进行复位。此方法,通过增加附着力的方式来提高汽车的动力性能,能在一定程度上达到汽车防滑效果。但采用传感器较多,成本较高,可靠性较差,另外控制算法单一且抗干扰能力较差。
6.公开号为cn 110843783 a的专利申请,公开了一种基于路面识别驱动防滑预控制方法与系统,利用车辆上的摄像头探测识别路面;计算四个车轮即将行驶的路面;利用力传感器计算每个车轮的载荷;利用路面附着系数定义公式和附着系数表计算每个车轮对应路面的最大附着力,获得每个车轮的驱动力的最大值,控制四个电机的驱动力始终小于等于电机驱动力的最大值,从而实现驱动防滑控制。此方法在设备调试良好的条件下,识别精度
较高。但由于车辆实际行驶工况复杂,当与已知测试工况存在偏差时,估计精度将会显著降低,另外传感器成本较高,可靠性较差。
技术实现要素:
7.本发明的目的在于提供一种基于卡车改装的自主行驶驱动防滑控制系统及其控制方法,从而克服现有智能车辆电机驱动防滑控制系统存在系统响应速度慢、控制算法单一且抗干扰能力差、鲁棒性差、路面适应性差、路面识别算法复杂、无法充分保证驱动轮与地面的附着系数的缺点。
8.为实现上述目的,本发明提供了一种基于卡车改装的自主行驶驱动防滑控制系统,包括控制装置和至少两个承载机构,两个所述承载机构对称设置于卡车底盘的左右两侧;其中一个所述承载机构为驱动承载机构,另一个所述承载机构为辅助承载机构;每个所述承载机构包括:支架,其与所述卡车底盘连接;摆臂,其上端与所述支架上下摆动铰接;推杆,其上端与所述支架铰接,所述推杆的下端与所述摆臂的中部铰接;所述推杆能够伸缩;以及车轮,其通过轮轴以能够转动的方式安装于所述摆臂的下端;其中,所述驱动承载机构的所述车轮为驱动轮,所述辅助承载机构的所述车轮为从动轮;所述驱动承载机构还包括压力传感器、伺服电机、联轴器和减速器,所述压力传感器安装于所述推杆的下端,所述伺服电机和所述减速器均安装于所述摆臂上,且所述伺服电机的输出端通过所述联轴器与所述减速器的输入端连接,所述减速器的输出端与所述驱动轮的轮轴连接;所述辅助承载机构还包括轮速传感器,所述轮速传感器安装于所述从动轮上;所述控制装置包括驱动防滑控制器和电机控制器,所述压力传感器和所述轮速传感器均与所述驱动防滑控制器数据连接;每个所述推杆和所述伺服电机的伺服驱动器均与所述电机控制器数据连接;所述驱动防滑控制器和所述电机控制器数据连接。
9.优选地,上述技术方案中,所述驱动防滑控制器包括:参数获取模块,其用于获取卡车行驶状态和伺服电机状态的状态信息,该状态信息包括驱动轮承受的纵向力fx,从动轮的角速度,驱动轮的滚动半径r、角速度ω和角加速度驱动轮承受的垂向载荷fz;计算模块,其能够根据驱动轮胎受力模型和卡车参数计算电机所需转矩te,驱动卡车自主向前行驶;根据伺服电机状态和卡车行驶状态的状态信息计算驱动轮实际滑转率s和地面利用附着系数μ,根据驱动轮实际滑转率s和地面利用附着系数μ的关系,估算车辆当前路面的最大利用附着系数μ
max
与最优滑转率s。;根据车辆当前路面的最大利用附着系数μ
max
计算电机最大等效滑移转矩t。;以及判断 驱动防滑控制模块,当车辆起步时,判断 驱动防滑控制模块判断电机所需转矩te与最大等效滑移转矩t。不等时,控制电机实际输出转矩等于最大等效滑移转矩t。;当车辆在行驶中加减速时,k时刻的实际滑转率s与最优滑转率s。差值绝对值为|e(k)|,当|e(k)|≥10%时,采用积分分离型pd控制算法;当|e(k)|<10%时,采用pid控制算法,对驱动轮进行驱动防滑控制,输出电机目标转矩;实时调节伺服电机输出目标转矩值,使驱动轮的实际滑转率始终控制在最优滑转率附近。
10.一种基于卡车改装的自主行驶驱动防滑控制系统的控制方法,包括有以下步骤:
11.步骤一:卡车在道路正常行驶时,两个承载机构均处于抬起状态;
12.步骤二:卡车进入作业工况时,卡车处于空挡状态,通过伸长推杆驱动两个承载机构向下摆动,使两个承载机构的车轮着地;
13.步骤三:通过电机控制器驱动伺服电机启动,根据驱动轮胎受力模型和卡车参数计算伺服电机所需转矩te,并向伺服电机发出指令输出转矩te,使驱动承载机构的驱动轮获得驱动力,驱动卡车前进作业;
14.步骤四:由轮速传感器采集从动轮的角速度,从而获得车辆当前的行驶速度v;由压力传感器采集驱动轮承受的垂直载荷fz;由伺服电机的编码器时刻反馈当前状态下伺服电机的转速、伺服电机当前的实际转矩t,并由此获得驱动轮的转速ω、角加速度
15.步骤五:根据驱动轮的转速ω、伺服电机当前的实际转矩t、车辆当前的行驶速度v、以及驱动轮上所承受的垂直载荷fz来计算驱动轮的实际滑转率s和当前实际滑转率下的地面利用附着系数μ;
16.步骤六:根据驱动轮的实际滑转率s和当前实际滑转率下的地面利用附着系数μ关系,估算当前路面最大利用附着系数μ
max
与最优滑转率s。;根据车辆当前路面最大利用附着系数μ
max
计算当前路面电机最大等效滑移转矩t。;
17.步骤七:当车辆起步时,判断电机所需转矩te与最大等效滑移转矩t。不相等时,控制电机实际输出转矩等于最大等效滑移转矩t。,保证起步加速足够的动力性能;当车辆在行驶中加减速时,k时刻的实际滑转率s与最优滑转率s。差值绝对值为|e(k)|,当|e(k)|≥10%时,采用积分分离型pd控制算法;当|e(k)|<10%时,采用pid控制算法,对滑移驱动轮进行驱动防滑控制,输出电机目标转矩;实时调节伺服电机输出目标转矩值,使驱动轮的实际滑转率s始终控制在最优滑转率s。附近。
18.优选地,上述技术方案中,在步骤三中,根据驱动轮胎受力模型,采用滑膜控制方法计算电机所需转矩时,电机所需转矩te的计算公式为:
[0019][0020]
式中,i为驱动轮转动惯量;fx为驱动轮的纵向力;fg为驱动轮滚动阻力系数;为驱动轮的角加速度;r为驱动轮滚动半径;fz为驱动轮所受垂向载荷;i为减速器的传动比,td为驱动轮转矩。
[0021]
优选地,上述技术方案中,在步骤五中,实际滑转率的计算公式为:
[0022]
s(k)=[ω(k)r-ν(k)]/ω(k)r
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0023]
式中:s(k)为k时刻驱动轮的实际滑转率;ω(k)为k时刻驱动轮转速,由伺服电机编码器实时反馈;v(k)为k时刻的从动轮车速,由轮速传感器测得;r为驱动轮滚动半径。
[0024]
优选地,上述技术方案中,在步骤五中,地面利用附着系数的计算公式为:
[0025][0026]
式中:k为时刻,μ(k)为k时刻驱动轮的地面利用附着系数;t(k)为k时刻电机实际转矩;fz为驱动轮所受到的垂向载荷,由压力传感器测得;i为减速器的传动比,η为传动系统的传动效率;i为驱动轮转动惯量;为驱动轮k时刻的角加速度;r为驱动轮滚动半径。
[0027]
优选地,上述技术方案中,在步骤六中,最优滑转率s。与最大利用附着系数μ
max
的计算公式为:
[0028][0029][0030]
式中:c1、c2、c3分别为轮胎参数;
[0031]
优选地,上述技术方案中,在步骤六中,当前路面时刻电机最大等效滑移转矩t。的计算公式为:
[0032][0033]
式中:fz为驱动轮所受到的垂向载荷;r为驱动轮滚动半径;i为驱动轮转动惯量;为驱动轮的角加速度;i为减速器的传动比;η为传动系统的传动效率。
[0034]
与现有技术相比,本发明具有如下有益效果:
[0035]
1.采用本发明的驱动防滑控制系统,进入作业工况时,卡车挂空挡,解除制动,控制装置驱动推杆伸长,驱动承载机构及辅助承载机构着地,通过控制推杆的伸缩状态来控制附着力;通过伺服电机驱动,实现卡车前进后退以及驻止,能够降低技术和人力成本,减少人工劳动强度和机器故障率,提高作业效率。
[0036]
2.采用本发明的驱动防滑控制系统和控制方法,采用滑膜 积分分离型pid控制算法的方式,并根据作业车辆在行驶条件下,结合实际滑转率与最优滑转率关系,和实际输出转矩与最大等效滑移转矩的滑移判断方法,能够实现基于滑转率驱动防滑控制和基于电机输出转矩的驱动防滑控制有效结合,可以有效克服系统响应速度慢、控制算法单一且抗干扰能力差、鲁棒性差、路面适应性差、路面识别算法复杂、无法充分保证驱动轮与地面的附着系数等缺点;实现作业车辆线控驱动防滑控制,从底层控制提高车辆行驶位置的精确度,实现车辆行驶位置的精确控制。
附图说明
[0037]
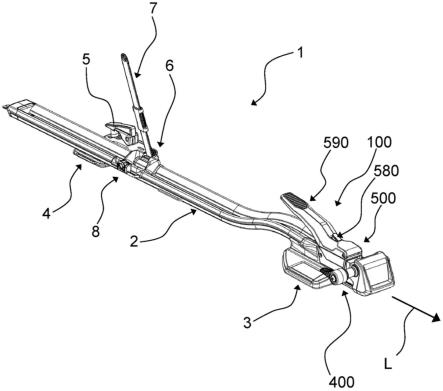
图1是根据本发明的驱动承载机构的结构示意图。
[0038]
图2是根据本发明的承载机构安装于卡车底盘上的结构示意图。
[0039]
图3是根据本发明的基于卡车改装的自主行驶驱动防滑控制系统的结构示意图。
[0040]
图4是根据本发明的驱动轮加减速时滑转率与地面附着系数关系图。
[0041]
图5是根据本发明的驱动轮轮胎受力模型图。
[0042]
图6是根据本发明的基于卡车改装的自主行驶驱动防滑控制系统的控制方法流程图。
[0043]
主要附图标记说明:
[0044]
1-驱动承载机构,2-支架,3-推杆,4-伺服电机,5-压力传感器,6-联轴器,7-减速器,8-车轮,9-摆臂,10-轮轴,11-辅助承载机构,12-电机控制器,13-驱动防滑控制器,14-轮速传感器,15-驱动轮,16-从动轮。
具体实施方式
[0045]
下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保
护范围并不受具体实施方式的限制。
[0046]
除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
[0047]
图1至图6显示了根据本发明优选实施方式的一种基于卡车改装的自主行驶驱动防滑控制系统的结构示意图,该驱动防滑控制系统包括控制装置和至少两个承载机构。
[0048]
参考图1至图3,两个承载机构对称设置于卡车底盘的左右两侧,用于驱动和控制卡车在进入作业工况后的行驶状态。其中一个承载机构为驱动承载机构1,另一个承载机构为辅助承载机构11。每个承载机构包括支架2、摆臂9、推杆3以及车轮8;支架2与卡车底盘连接,以将承载机构安装于卡车底盘上。摆臂9的上端与支架2上下摆动铰接,便于摆臂9的收起和下放;推杆3的上端与支架2铰接,推杆3的下端与摆臂9的中部铰接;推杆3能够伸缩,通过控制推杆3的伸缩,来驱动摆臂9上下摆动,实现收起和下放功能。车轮8通过轮轴10以能够转动的方式安装于摆臂9的下端。其中,驱动承载机构1的车轮8为驱动轮15,辅助承载机构11的车轮8为从动轮16。驱动承载机构1还包括压力传感器5、伺服电机4、联轴器6和减速器7,压力传感器5安装于推杆3的下端,用于获取驱动轮15所承受的垂向载荷fz。伺服电机4和减速器7均安装于摆臂9上,且伺服电机4的输出端通过联轴器6与减速器7的输入端连接,减速器7的输出端与驱动轮15的轮轴10连接,通过伺服电机4驱动驱动轮15转动,从而驱动卡车前进或后退。辅助承载机构11还包括轮速传感器14,轮速传感器14安装于从动轮16上,用于获取从动轮16的转速,从而计算出车辆行驶速度v。
[0049]
参考图3,控制装置安装于卡车上,且控制装置包括驱动防滑控制器13和电机控制器12,压力传感器5和轮速传感器14均与驱动防滑控制器13数据连接;每个推杆3和伺服电机4的伺服驱动器均与电机控制器12数据连接;驱动防滑控制器13和电机控制器12数据连接,以使驱动防滑控制装置能够获取卡车行驶状态和伺服电机4状态的状态信息,并根据该状态信息控制推杆3和伺服电机4的工作。其中,电机控制器12的型号可为stm32f407vgt6。电机控制器12作为下位机控制器,主要接受上位机控制器发出的指令,控制伺服电机4驱动器输出电机目标转矩;驱动防滑控制器13作为上位机控制器,主要接收来自各个传感器的数据,并对数据进行计算和判断,从而向下位机控制器输出正确信号指令。
[0050]
参考图3和图6,优选地,驱动防滑控制器13包括参数获取模块、计算模块和判断 驱动防滑控制模块。参数获取模块用于获取卡车行驶状态和伺服电机4状态的状态信息,该状态信息包括驱动轮15承受的纵向力fx,从动轮16的角速度,驱动轮15的滚动半径r、角速度ω和角加速度驱动轮15承受的垂向载荷fz。计算模块能够根据驱动轮胎受力模型和卡车参数计算电机所需转矩te,驱动卡车自主向前行驶;根据伺服电机4状态和卡车行驶状态的状态信息计算驱动轮15实际滑转率s和地面利用附着系数μ,根据驱动轮的实际滑转率s和当前实际滑转率下的地面利用附着系数μ关系,估算当前路面最大利用附着系数μ
max
与最优滑转率s。;并根据驱动轮15胎受力模型和卡车参数计算电机所需转矩te,根据车辆当前路面最大利用附着系数μ
max
计算当前路面电机最大等效滑移转矩t。。当车辆起步时,判断 驱动防滑控制模块判断电机所需转矩te与最大等效滑移转矩t。不等时,控制电机实际输出转矩等于最大等效滑移转矩t。;当车辆在行驶中加减速时,k时刻的实际滑转率s与最优滑转率s。差值绝对值为|e(k)|,当|e(k)|≥10%时,判断 驱动防滑控制模块采用积分分离
型pd控制算法进行控制,从而对驱动轮15进行驱动防滑控制,输出电机目标转矩;当|e(k)|<10%时,判断 驱动防滑控制模块采用pid控制算法进行控制,从而对驱动轮15进行驱动防滑控制,输出电机目标转矩;能够实时调节伺服电机4输出目标转矩值,使驱动轮15的实际滑转率始终控制在最优滑转率附近。
[0051]
采用本发明的自主行驶驱动防滑控制系统,进入作业工况时,卡车挂空挡,解除制动,控制装置驱动推杆3伸长,驱动承载机构1及辅助承载机构11着地,通过控制推杆3的伸缩状态来控制附着力;通过伺服电机4驱动,实现汽车前进后退以及驻止,能够降低技术和人力成本,减少人工劳动强度和机器故障率,提高作业效率。
[0052]
参考图1至图6,一种基于卡车改装的自主行驶驱动防滑控制系统的控制方法,包括有以下步骤:
[0053]
步骤一:卡车在道路正常行驶时,两个承载机构均处于抬起状态。
[0054]
步骤二:卡车进入作业工况时,卡车处于空挡状态,通过伸长推杆3驱动两个承载机构向下摆动,使两个承载机构的车轮8着地。
[0055]
步骤三:通过电机控制器12驱动伺服电机4启动,根据驱动轮胎15受力模型和卡车参数计算伺服电机14所需转矩te,并向伺服电机14发出指令输出转矩te,使驱动承载机构1的驱动轮15获得驱动力,驱动卡车前进作业。
[0056]
步骤四:由轮速传感器14采集从动轮的角速度,从而获得车辆当前的行驶速度v;由压力传感器5采集驱动轮15承受的垂直载荷fz;由伺服电机4的编码器反馈当前状态下伺服电机4的转速、伺服电机4当前的实际转矩t,并由此获得驱动轮15的转速ω、角加速度
[0057]
步骤五:根据驱动轮15的转速ω、伺服电机4当前的实际转矩t、车辆当前的行驶速度v、以及驱动轮15上所承受的垂直载荷fz来计算驱动轮15的实际滑转率s和当前实际滑转率下的地面利用附着系数μ。
[0058]
步骤六:参考图4,根据驱动轮15的实际滑转率s和当前实际滑转率下的地面利用附着系数μ关系,估算当前路面最大利用附着系数μ
max
与最优滑转率s。;根据车辆当前路面的最大利用附着系数μ
max
计算当前路面电机最大等效滑移转矩t。。
[0059]
步骤七:当车辆起步时,判断电机所需转矩te与最大等效滑移转矩t。不相等时,控制电机实际输出转矩等于最大等效滑移转矩t。,保证起步加速足够的动力性能;当车辆在行驶中加减速时,k时刻的实际滑转率s与最优滑转率s。差值绝对值为|e(k)|,当|e(k)|≥10%时,采用积分分离型pd控制算法;当|e(k)|<10%时,采用pid控制算法;对滑移驱动轮15进行驱动防滑控制,输出电机目标转矩;实时调节伺服电机4输出目标转矩值,使驱动轮15的实际滑转率s始终控制在最优滑转率s。附近。
[0060]
通过上层控制算法实时调节伺服电机4输出目标转矩值,使驱动轮15的实际滑转率始终控制在最优滑转率附近,从而保证良好的驱动防滑效果,以提高作业车辆行驶位置的控制精度。
[0061]
参考图1至图6,优选地,在步骤三中,根据驱动轮胎受力模型,采用滑膜控制方法计算电机所需转矩时,电机所需转矩te的计算公式为:
[0062][0063]
式中,i为驱动轮转动惯量;fx为驱动轮的纵向力;fg为驱动轮滚动阻力系数;为
驱动轮的角加速度;r为驱动轮滚动半径;fz为驱动轮所受垂向载荷;i为减速器的传动比,td为驱动轮转矩。
[0064]
参考图1至图6,优选地,在步骤五中,实际滑转率的计算公式为:
[0065]
s(k)=[ω(k)r-ν(k)]/ω(k)r
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0066]
式中:s(k)为k时刻驱动轮15的实际滑转率;ω(k)为k时刻驱动轮15转速,由伺服电机4编码器实时反馈;v(k)为k时刻的从动轮16车速,由轮速传感器14测得;r为驱动轮15滚动半径。
[0067]
参考图1至图6,优选地,在步骤五中,地面利用附着系数的计算公式为:
[0068][0069]
式中:k为时刻,μ(k)为k时刻驱动轮15的地面利用附着系数;t(k)为k时刻电机实际转矩;fz为驱动轮15所受到的垂向载荷,由压力传感器5测得;i为减速器7的传动比,η为传动系统的传动效率;i为驱动轮15转动惯量;为驱动轮k时刻的角加速度;r为驱动轮15滚动半径。
[0070]
参考图4,优选地,在步骤六中,估算最优滑转率s。与路面最大利用附着系数μ
max
时,其步骤如下,对于不同地面利用附着系数μ(s)的估计,可根据burck-hardt轮胎模型表达式得出,即地面利用附着系数μ(s)的计算公式为:
[0071]
μ(s)=c1(1-e-c2s)-c3s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4-1)
[0072]
式中:c1、c2、c3分别为轮胎参数;
[0073]
在carsim软件中,对轮胎进行测试,得到不同路面下滑转率与利用附着系数的关系曲线。利用非线性最小二乘法,对曲线进行拟合,得到c1、c2和c3的值。由图4可以看出,利用附着系数有最大值,定义利用附着系数μ随滑转率s的变化率为dμ/ds,根据高等数学可知,dμ/ds在0附近时μ有最大值;即对等式(4-1)求导,并令:
[0074][0075]
求得
[0076]
其中,最大利用附着系数μ
max
的计算公式为:
[0077][0078]
利用附着系数和驱动轮15滑转率在检测到驱动轮15滑转时(s超过5%)以0.001s的步长开始采集,当s≥5%时,计算采集的利用附着系数数据系列的最大值及对应的滑转率作为此时的工作点,对路面附着系数进行识别,估算最大利用附着系数,在图4中,假如工作点如图4中点c,把点c对应的滑转率代入式(4-1)中,分别求得点a和点b的μ(a)和μ(b),计算插值因子λ为:
[0079]
λ=[μ(c)-μ(b)]/[μ(a)-μ(b)]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4-3)
[0080]
若当前路面下的最大附着系数为点f,则点f的最大利用附着系数μ(f)为:
[0081]
μ(f)=λ[μ(e)-μ(g)] μ(g)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4-4)
[0082]
式中:μ(e)和μ(g)为典型路面的最大利用附着系数。
[0083]
同理,采用线性插值法,可求得当前路面的最优滑转率为
[0084]
s(f)=λ[s(e)-s(g)] s(g)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4-5)
[0085]
式中:s(e)和s(g)为典型路面的最优滑转率。
[0086]
参考图1至图6,优选地,在步骤六中,当前路面时刻电机最大等效滑移转矩t。的计算公式为:
[0087][0088]
式中:fz为驱动轮15所受到的垂向载荷;r为驱动轮15滚动半径;i为驱动轮15转动惯量;为驱动轮15的角加速度;i为减速器7的传动比;η为传动系统的传动效率。
[0089]
根据驱动轮15受力模型得到的电机需求转矩作为前馈转矩值,并将最优滑转率与实际滑转率之间误差信号作为输入量,采用积分分离型pid控制算法,引入pid控制器对转矩进行修正控制。k时刻实际滑转率s与最优滑转率s。差值绝对值为|e(k)|,当|e(k)|≥10%时,采用积分分离型pd控制,避免较大超调量,增加响应速度,利用pd控制器调节电机控制转矩,使得电机控制转矩与电机最大等效滑移转矩相等;当|e(k)|<10%时,采用pid控制,消除静态误差,采用小kp、ki参数的pid控制器调节电机控制转矩,使得电机控制转矩为在滞缓区间的滑转率范围内将保持上一时刻电机需求转矩值,保证车辆充分的动力性能。
[0090]
采用本发明的自主行驶驱动防滑控制系统和控制方法,能够实现基于滑转率驱动防滑控制和基于电机输出转矩的驱动防滑控制有效结合,可以有效克服系统响应速度慢、控制算法单一且抗干扰能力差、鲁棒性差、路面适应性差、路面识别算法复杂、无法充分保证驱动轮15与地面的附着系数等一系列缺点;并实现作业车辆线控驱动防滑控制,从底层控制提高车辆行驶位置的精确度,实现车辆行驶位置的精确控制。
[0091]
前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。