1.本发明涉及交通技术领域,具体为一种高速公路团雾路段主动安全诱导系统。
背景技术:
2.据统计,在高速公路上,由不良天气引起的交通事故占事故总数的近1/4,其中,团雾天气会使驾驶员行车时骤然失去视线、应对不及时,进而诱发交通事故。因此,建立一种高速公路团雾路段主动安全诱导系统,对提高高速公路团雾多发路段交通安全水平具有重要意义。
技术实现要素:
3.本发明的目的是:针对高速公路在团雾天气时易发生交通事故的问题,提出一种高速公路团雾路段主动安全诱导系统。
4.本发明为了解决上述技术问题采取的技术方案是:
5.一种高速公路团雾路段主动安全诱导系统,包括信息采集子系统、中心决策子系统和诱导控制子系统;
6.所述信息采集子系统包括交通流检测单元和气象环境检测单元;
7.所述交通流检测单元用于采集团雾路段交通流率和团雾路段平均车速;
8.所述气象环境检测单元用于采集团雾路段能见度;
9.所述中心决策子系统根据团雾路段路面摩阻系数、团雾路段道路纵坡坡度以及信息采集子系统采集的团雾路段交通流率、团雾路段平均车速和团雾路段能见度制定诱导策略,所述诱导策略包括路侧警示灯闪烁策略、车辆安全行驶速度和团雾路段行车风险严重程度;
10.所述诱导控制子系统根据路侧警示灯闪烁策略调节黄色警示灯的闪烁亮度和频率,并将车辆安全行驶速度和团雾路段行车风险严重程度进行提醒。
11.进一步的,所述团雾路段平均车速表示为:
[0012][0013]
其中,n为通过的车辆数,vi为每辆车的速度。
[0014]
进一步的,所述诱导策略中路侧警示灯闪烁策略的获取步骤为:
[0015]
首先对团雾路段能见度进行分级,然后根据能见度等级制定黄色警示灯闪烁策略,黄色警示灯闪烁策略为:
[0016]
能见度等级能见度范围/m亮度/cd频率/次/min一级300~
‑‑‑‑
二级200~30045045三级150~20055075四级100~150650105
五级50~100750135六级25~501000165。
[0017]
进一步的,所述诱导策略中车辆安全行驶速度的获取步骤为:
[0018]
首先根据团雾路段路面摩阻系数、团雾路段道路纵坡坡度和能见度计算最大安全车速,将最大安全车速以5的倍数向下取整作为建议限速值;
[0019]
最大安全车速表示为:
[0020][0021]
其中,a为制动减速度,单位m/s2,f为路面摩阻系数,f取0.4,i为纵坡坡度,单位为%,上坡为正,下坡为负,l为能见度,单位为m。
[0022]
进一步的,所述诱导策略中团雾路段行车风险严重程度的获取步骤为:
[0023]
步骤一:建立bp神经网络风险评估模型;
[0024]
步骤一一:将团雾路段交通流率、团雾路段平均车速、团雾路段能见度和团雾路段道路纵坡坡度作为输入指标,并进行量化,具体为:
[0025]
将团雾路段交通流率量化为以下四个标准:
[0026]
500以下:1;
[0027]
500~750:2;
[0028]
750~1000:3;
[0029]
1000以上:4;
[0030]
团雾路段交通流率单位为pcu/lane;
[0031]
将团雾路段平均车速量化为以下五个标准:
[0032]
70以下:1;
[0033]
70~80:2;
[0034]
80~90:3;
[0035]
90~100:4;
[0036]
100~110:5;
[0037]
团雾路段平均车速单位为km/h;
[0038]
将团雾路段能见度量化为以下六个标准:
[0039]
300以上:1;
[0040]
200~300:2;
[0041]
150~200:3;
[0042]
100~150:4;
[0043]
50~100:5;
[0044]
50以下:6;
[0045]
团雾路段能见度单位为m;
[0046]
将团雾路段道路纵坡坡度量化为以下四个标准:
[0047]
1以下:1
[0048]
1~2:2;
[0049]
2~3:3;
[0050]
3~4:4;
[0051]
团雾路段道路纵坡坡度为%;
[0052]
步骤一二:对输入指标进行归一化处理;
[0053]
步骤一三:对每个输入指标进行权重赋值,得到每个输入指标的权重;
[0054]
步骤一四:根据每个输入指标的权重和归一化后的数值得到行车风险值,将行车风险值作为bp神经网络的输出;
[0055]
步骤二:使用支持向量机算法对行车风险值进行划分,得到行车风险值的划分阈值,并根据划分阈值生成团雾路段行车风险等级判断结果。
[0056]
进一步的,所述归一化表示为:
[0057][0058]
其中,xj为归一化处理后的输入指标,x为原始输入指标,min(x)为原始输入指标中的最小值,max(x)为原始输入指标中的最大值。
[0059]
进一步的,所述权重赋值表示为:
[0060][0061][0062]
其中,kj为第j个指标的变异系数,dj为第j个指标的均方差,为第j个指标的均值,ai为第j个指标的权重。
[0063]
进一步的,所述行车风险值表示为:
[0064][0065]
进一步的,所述步骤二的具体步骤为:
[0066]
利用核函数构造二次规划问题,并利用构造的二次规划问题进行分类,并根据分类结果得到行车风险值的划分阈值,最后根据划分阈值生成团雾路段行车风险等级判断结果;
[0067]
二次规划问题表示为:
[0068][0069][0070]
0≤αi≤c,i=1,2,...,n
[0071]
其中,n为样本个数,αi,αj为拉格朗日乘子,yi,yj为样本xi,xj的类标签,k(xi,xj)为
核函数,取为c为惩罚因子,σ表示核半径,σ大于0;
[0072]
团雾路段行车风险等级判断结果表示为:
[0073]
行车风险等级风险值低风险0~0.5一般风险0.5~1较高风险1~1.5高风险1.5以上
[0074]
进一步的,所述bp神经网络具体为:
[0075]
输入层节点数为4个,对应团雾路段交通流率、平均车速、团雾路段能见度和团雾路段道路纵坡坡度4个影响因子;
[0076]
隐含层传递函数采用tansig,节点数为4个;
[0077]
输出层传递函数采用purelin,节点数1个,输出结果为团雾路段行车风险值;
[0078]
训练函数采用trainlm;初始权值和阈值设在(-1,1)之间;
[0079]
隐含层输出值如下式:
[0080][0081]
其中,f为隐含层传递函数,即tansig函数,w
ij
为输入层节点i和隐含层节点j之间的权值,xi为输入层节点i的输出值,bj为隐含层节点j的阈值;
[0082]
tansig函数表示为:
[0083][0084]
输出层输出值表示为:
[0085][0086]
其中,g为输出层传递函数,即purelin函数,vj为隐含层节点j和输出层节点之间的权值,c为输出层节点的阈值;
[0087]
purelin函数表示为:
[0088]
g(x)=x
[0089]
神经网络预测误差表示为:
[0090]
e=a-y
[0091]
其中,a为期望输出;
[0092]
由预测误差更新输入层和隐含层之间的权值w
ij
、隐含层和输出层之间的权值vj、隐含层各节点阈值bj和输出层节点阈值c,表示为:
[0093]wij
=w
ij
ηsj(1-sj)xivje,i=1,2,3,4;j=1,2,3,4
[0094]
vj=vj ηsje,j=1,2,3,4
[0095]bj
=bj ηsj(1-sj)vje,j=1,2,3,4
[0096]
c=c e
24965.3)设置要求,如表1所示,其中
“‑‑”
表示不开启。
[0119]
黄色警示灯闪烁标准表1
[0120][0121]
根据团雾路段路面摩阻系数、纵坡坡度和能见度等信息计算最大安全车速,取小于此数值且为5的倍数作为建议限速值,最大安全车速计算如下式:
[0122][0123]
其中,a为制动减速度(m/s2),f为路面摩阻系数,取0.4;i为纵坡坡度,%,上坡为正,下坡为负;l为能见度,m。
[0124]
道路纵坡坡度信息提前输入中心决策子系统。
[0125]
高速公路团雾路段最大安全车速,如表2所示。
[0126]
高速公路团雾路段最大安全车速(km/h)表2
[0127][0128][0129]
根据团雾路段交通流率、平均车速、能见度和纵坡坡度等信息建立bp神经网络风险评估模型,计算团雾路段行车风险等级,并制定相应的提示信息。
[0130]
根据数据库信息,对输入指标进行量化:
[0131]
将团雾路段小时交通流率q(pcu/lane)量化为以下四个标准:
[0132]
①
500以下:1;
[0133]
②
500~750:2;
[0134]
③
750~1000:3;
[0135]
④
1000以上:4。
[0136]
将团雾路段平均车速(km/h)量化为以下五个标准:
[0137]
①
70以下:1;
[0138]
②
70~80:2;
[0139]
③
80~90:3;
[0140]
④
90~100:4;
[0141]
⑤
100~110:5。
[0142]
将团雾路段能见度(m)量化为以下六个标准:
[0143]
①
300以上:1;
[0144]
②
200~300:2;
[0145]
③
150~200:3;
[0146]
④
100~150:4;
[0147]
⑤
50~100:5;
[0148]
⑥
50以下:6。
[0149]
将团雾路段纵坡坡度(%)量化为以下四个标准:
[0150]
①
1以下:1
[0151]
②
1~2:2;
[0152]
③
2~3:3;
[0153]
④
3~4:4。
[0154]
数据库中每个样本的输入指标均做归一化处理,归一化处理如下式:
[0155][0156]
其中,xj为归一化处理后的输入指标;x为原始输入指标;min(x)为原始输入指标中的最小值;max(x)为原始输入指标中的最大值。
[0157]
对各输入指标权重赋值,赋值计算公式如下:
[0158][0159][0160]
其中:kj为第j个指标的变异系数;dj为第j个指标的均方差;为第j个指标的均值;aj为第j个指标的权重。
[0161]
最后,根据每个指标的权重和归一化后的数值计算得到行车风险值,该值作为bp神经网络的输出,行车风险值计算如下式:
[0162][0163]
使用支持向量机算法对风险值进行划分,得到风险值的划分阈值,并生成团雾路段行车风险等级判断结果,此过程如下:
[0164]
样本为小时交通流率、平均车速、能见度、纵坡坡度四项指标构成的多维数组,无法线性可分,故利用核函数使其线性可分,构造如下凸二次规划问题:
[0165][0166][0167]
0≤αi≤c,i=1,2,...,n
[0168]
其中:n为样本个数;αi,αj为拉格朗日乘子;yi,yj为样本xi,xj的类标签;k(xi,xj)为核函数,取为c为惩罚因子。
[0169]
由支持向量机算法得出低风险与一般风险的阈值为0.495,取为0.5;一般风险与较高风险的阈值为1.034,取为1;较高风险和高风险的阈值为1.478,取为1.5。团雾路段行车风险等级与风险值对应关系如表3所示。
[0170]
团雾路段行车风险等级与风险值对应关系表3
[0171][0172]
构建bp神经网络,对各输入指标权重进行优化,其结构如图3所示:
[0173]
bp神经网络中输入层节点数4个,对应小时平均流率、平均车速、能见度和纵坡坡度4个影响因子;隐含层传递函数采用tansig,节点数4个;输出层传递函数采用purelin,节点数1个,输出结果为团雾路段行车风险值;训练函数采用trainlm;初始权值和阈值设在(-1,1)之间。
[0174]
隐含层输出值如下式:
[0175][0176]
其中,f为隐含层传递函数,即tansig函数;w
ij
为输入层节点i和隐含层节点j之间的权值;xi为输入层节点i的输出值;bj为隐含层节点j的阈值。
[0177]
tansig函数如下式:
[0178][0179]
输出层输出值如下式:
[0180][0181]
其中,g为输出层传递函数,即purelin函数;vj为隐含层节点j和输出层节点之间的权值;c为输出层节点的阈值。
[0182]
purelin函数如下式:
[0183]
g(x)=x
ꢀꢀꢀ
(10)
[0184]
神经网络预测误差计算如下式:
[0185]
e=a-y
ꢀꢀꢀ
(11)
[0186]
其中,a为期望输出。
[0187]
由预测误差更新输入层和隐含层之间的权值w
ij
、隐含层和输出层之间的权值vj、隐含层各节点阈值bj和输出层节点阈值c,计算如下式:
[0188]wij
=w
ij
ηsj(1-sj)xivje,i=1,2,3,4;j=1,2,3,4
ꢀꢀꢀ
(12)
[0189]
vj=vj ηsje,j=1,2,3,4
ꢀꢀꢀ
(13)
[0190]bj
=bj ηsj(1-sj)vje,j=1,2,3,4
ꢀꢀꢀ
(14)
[0191]
c=c e
ꢀꢀꢀ
(15)
[0192]
其中,η为学习率。
[0193]
bp神经网络流程如图4所示:
[0194]
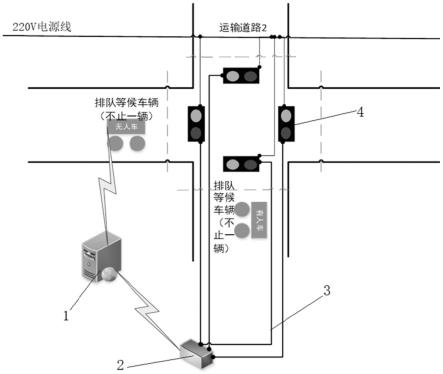
所述诱导控制子系统是将诱导策略通过可视化方式传递给驾驶员,包括可变信息板、警示灯、车载语音系统,具体如图2。
[0195]
在团雾路段两侧护栏处等间距设置若干警示灯,根据制定的黄色警示灯闪烁策略,调节黄色警示灯闪烁亮度和频率。
[0196]
中心控制子系统将车辆建议限速值由通信网络发布至诱导控制子系统。
[0197]
在团雾路段布设路侧可变信息板(ⅰ、ⅱ、
ⅲ…
),显示建议限速值,此信息同时由车内语音系统播报:
[0198]
语音播报“路段限速xx”,如驾驶员超过此限速,则语音播报“您已超速,请限速xx行驶”。
[0199]
在团雾路段之前布设路侧可变信息板(o),提示团雾路段道路信息,此信息同时由车内语音系统播报。可变信息板显示信息如表4所示。
[0200]
可变信息板显示信息表4
[0201][0202]
实施例:
[0203]
本实施例中硬件方面:选用ogreat x2雷达作为交通流率和车速检测设备,选用cs120a能见度仪作为能见度检测设备,选用stc89c52单片机作为计算单元,警示灯布置间距30m;软件设计方面:采用c语言作为编程语言;通信方式方面:选用zigbee无线通信技术实现控制主机与雷达、能见度仪、警示灯、可变信息板之间的通信,选用5g-v2x无线通信技术实现控制主机和车辆之间的通信。
[0204]
对某高速公路的一团雾路段,采用本发明对其进行主动诱导:
[0205]
(1)此团雾路段各可变信息板之间路段记为si,信息采集子系统采集路段si的小时交通流率、平均车速和能见度。
[0206]
(2)利用zigbee技术将上述信息经由通信网络上传至中心决策子系统团雾路段数据库。
[0207]
(3)对路段s1,其小时交通流率为8000pcu/h,平均车速为90km/h,能见度为75m,纵坡坡度为2.5%。由云计算得:
[0208]
①
路侧警示灯闪烁亮度75cd,频率为135次/min;
[0209]
②
车辆建议限速值为45km/h;
[0210]
③
风险值为1.12,对应较高风险。
[0211]
(4)利用zigbee技术和5g-v2x技术将警示灯闪烁策略、限速策略和团雾路段道路信息发布至诱导控制子系统:
[0212]
①
路侧警示灯闪烁亮度75cd,频率为135次/min;
[0213]
②
可变信息板(o)作为预提示板,显示“前方团雾危险路段,注意限速45”,此信息同时由车内语音系统播报;
[0214]
③
可变信息板(ⅰ)显示建议限速值45,同时由车内语音系统播报“路段限速45”,如驾驶员超过此限速,则语音播报“您已超速,请限速45行驶”。
[0215]
(5)后续可变信息板(ⅱ、ⅲ、
ⅳ…
)显示信息由对应路段信息计算得到。
[0216]
高速公路团雾路段车辆建议限速值如表5所示。
[0217]
高速公路团雾路段车辆建议限速值(km/h)表5
[0218][0219][0220]
需要注意的是,具体实施方式仅仅是对本发明技术方案的解释和说明,不能以此限定权利保护范围。凡根据本发明权利要求书和说明书所做的仅仅是局部改变的,仍应落入本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。