10a、动密封圈ⅱ10b、转子外壳11、弹性膜片12、压片13、四棱台14、转子叶片15、缓冲块ⅰ16和密封堵头17组成,其中螺钉6、磁环固定座7、磁环8、轴承ⅰ9a和动密封圈ⅰ10a自右至左排列于转子外壳11右侧,其中动密封圈ⅰ10a固接于转子外壳11的内轮廓对11b的右内轮廓;轴承ⅰ9a外圈与转子外壳11中外轮廓对11c的右外轮廓过盈连接;磁环8固接于磁环固定座7下部中心;磁环固定座7近上端经螺钉6固接于转子外壳11的螺纹孔ⅰ11a;弹性膜片12、压片13和四棱台14自下而上排列,其中弹性膜片12和压片13经四棱台14固接于转子外壳11上面中心的螺纹孔ⅱ11h;转子叶片组15固接于转子外壳11内圈的卡槽11e;轴承ⅱ9和动密封圈ⅱ10b左右排列,动密封圈ⅱ10b固接于转子外壳11的内轮廓对11b的左内轮廓;轴承ⅱ9b外圈与转子外壳11中外轮廓对11c的右外轮廓过盈连接;缓冲块对ⅰ16的两个缓冲块固接于转子外壳11前面中部的缓冲槽对11d的两个缓冲槽中;密封堵头17固接于转子外壳11前面的下孔11f。
6.所述的定子组件c由无油衬套18、读数头19、螺母ⅰ20a、螺母ⅱ20b、右侧定子外壳21、缓冲块ⅱ22a、缓冲块ⅲ22b、垫片ⅰ23a、垫片ⅱ23b、端盖ⅰ24a、端盖ⅱ24b、平键ⅰ25a、平键ⅱ25b、轴套26、通电线圈27、定子叶片28、导向轴29、中心轴30、左侧定子外壳31、涡卷弹簧32、防尘架33、固定架34、台阶衬套35和台阶螺钉36组成,其中缓冲块ⅱ22a固接于右侧定子外壳21的缓冲槽ⅰ21d;缓冲块ⅲ22b固接于左侧定子外壳31的缓冲槽ⅱ31b;无油衬套18固接于右侧定子外壳21的圆柱21d;读数头19固接于右侧定子外壳21的凸台21a;右侧定子外壳21上部、垫片ⅰ23a、端盖ⅰ24a、轴套26、通电线圈27、定子叶片28、导向轴29、中心轴30、端盖ⅱ24b、垫片ⅱ23b和左侧定子外壳31上部同轴排列,导向轴29穿过右侧定子外壳21上部、垫片ⅰ23a、端盖ⅰ24a、轴套26、端盖ⅱ24b、垫片ⅱ23b和左侧定子外壳31,导向轴29右端经螺母ⅰ20a固接于右侧定子外壳21的圆槽ⅰ21c;导向轴29左端经螺母ⅱ20b固接于左侧定子外壳31的圆槽ⅱ31a;中心轴30固接于两个端盖24之间,通电线圈27固接于中心轴30的主轴30a,平键25固接于中心轴30的键槽30b,定子叶片组28的叶片均匀排列并固接于轴套26内;涡卷弹簧32、防尘架33、固定架34、台阶衬套35和台阶螺钉36同轴排列,涡卷弹簧32固接于中心轴30的弹簧槽30c;台阶衬套35经台阶螺钉36固接于中心轴30的螺纹孔ⅳ30d;防尘架33与台阶衬套35旋转配合;固定架34与台阶衬套35旋转配合。
7.所述的运动测量控制组件d由微处理器37、蓄电池38、电池座39和电流控制电路板40组成,蓄电池38固接于电池座39上端面;微处理器37固接于蓄电池38上端;电流控制电路板40固接于电池座39下端面。
8.本发明的一种磁流变式膝关节假肢控制方法,关节传感单元有由磁环8和读数头19组成的角度编码器、位于微处理器37上的惯性测量单元和单轴压力传感器4,通过模拟数字转换器a/d转换器分别将膝关节运动的角度、位置姿态、加速度、力和力矩数据信息传递给微处理器37,这些数据经微处理器37存储的运动意图识别算法和地形识别算法判断膝关节假肢的运动状态,经有限状态机算法规划下一时刻膝关节假肢所需的扭矩,以pwm信号传递给电流控制电路板40,电流控制电路板40输出相应的电流给通电线圈27,控制磁流变液的摩擦系数,配合涡卷弹簧32自身变形产生的扭矩,最终作用于膝关节假肢执行机构,依此循环,使膝关节假肢扭矩高度拟合健康人体的关节扭矩。其中关节传感单元、微处理器37和电流控制电路板40由蓄电池38供电。
9.本发明的有益效果在于:本发明是基于磁流变技术设计的膝关节假肢,其可控制
调节的阻尼值范围较大,响应时间快,稳定性高,能自动适应起立/坐下、常速、慢速和快速的步态,能根据平地、上/下坡、下楼梯等运动环境自主调试;通过高效的有限状态机控制方法可高度拟合健康人体的关节扭矩;该假肢整体结构紧凑,质量轻便,可提升患者穿戴和运动的舒适性。
附图说明
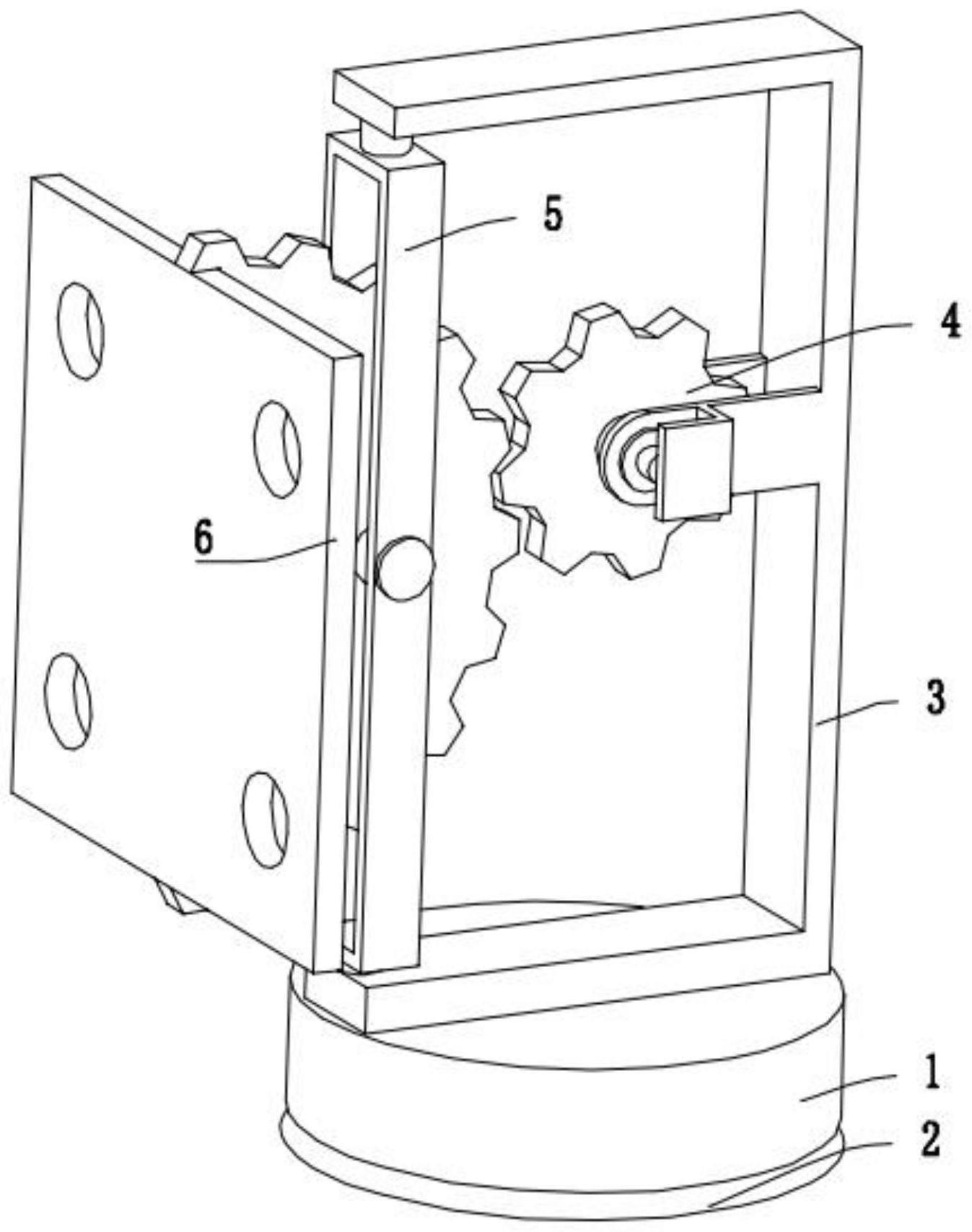
10.图1为磁流变式膝关节假肢的立体图;
11.图2为磁流变式膝关节假肢的右视图;
12.图3为磁流变式膝关节假肢的左视图;
13.图4为磁流变式膝关节假肢的主视图;
14.图5为磁流变膝关节假肢的分解图;
15.图6为转子组件的分解图;
16.图7为转子外壳的立体图;
17.图8为转子外壳的右视图;
18.图9为转子外壳的剖视图;
19.图10为定子组件的分解图;
20.图11为右侧定子外壳的外视立体图;
21.图12为右侧定子外壳的内视立体图;
22.图13为右侧定子外壳的右视图;
23.图14为中心轴的立体图;
24.图15为左侧定子外壳的外视立体图;
25.图16为左侧定子外壳的内视立体图;
26.图17为左侧定子外壳的左视图;
27.图18为运动测量控制组件的立体图;
28.图19为运动测量控制组件的分解图;
29.图20为磁流变膝关节假肢的剖视图;
30.图21为磁流变膝关节假肢未工作状态的原理图;
31.图22为磁流变膝关节假肢工作状态的原理图;
32.图23为通电仿真膝关节扭矩的仿真图;
33.图24为磁流变式膝关节假肢的控制框图;
34.图25为磁流变式膝关节假肢的地形识别判断框图;
35.图26为步态行走周期阶段示意图;
36.图27为慢速状态下膝关节角度与扭矩的关系图;
37.图28为常速状态下膝关节角度与扭矩的关系图;
38.图29为快速状态下膝关节角度与扭矩的关系图;
39.图30为由站到坐到站一个周期下膝关节扭矩的折线图;
40.图31为上楼一个周期下膝关节扭矩的折线图;
41.图32为上坡一个周期下膝关节扭矩的折线图;
42.图33为下坡一个周期下膝关节扭矩的折线图;
43.其中:1.假肢接受腔 a.磁流变膝关节假肢 2.小腿 3.脚板 b.转子组件 c.组定子组件 4.单轴压力传感器 5.腿管连接件 6.螺钉 7.磁环固定座 8.磁环 9.轴承 9a.轴承
ⅰꢀ
9b.轴承
ⅱꢀ
10.动密封圈 10a.动密封圈
ⅰꢀ
10b.动密封圈
ⅱꢀ
11.转子外壳 11a.螺纹孔
ⅰꢀ
11b.内轮廓对
ⅰꢀ
11c.外轮廓对
ⅱꢀ
11d.缓冲槽对 11e.卡槽 11f.下孔 11h.螺纹孔
ⅱꢀ
12.弹性膜片 13.压片 14.四棱台 15.转子叶片 16.缓冲块
ⅰꢀ
17.密封堵头 18.无油衬套 19.读数头 20.螺母 20a.螺母
ⅰꢀ
20b.螺母
ⅱꢀ
21.右侧定子外壳 21a.凸台 21b.圆柱 21c.圆槽
ⅰꢀ
21d.缓冲槽
ⅰꢀ
21e.凹槽
ⅰꢀ
21f.圆台
ⅰꢀ
21g.螺纹孔
ⅲꢀ
22a.缓冲块
ⅱꢀ
22b.缓冲块
ⅲꢀ
23.垫片 23a.垫片
ⅰꢀ
23b.垫片
ⅱꢀ
24.端盖 24a.端盖
ⅰꢀ
24b.端盖
ⅱꢀ
25.平键 25a.平键
ⅰꢀ
25b.平键
ⅱꢀ
26轴套 27.通电线圈 28.定子叶片 29.导向轴 30.中心轴 30a.主轴 30b.键槽 30c.弹簧槽 30d.螺纹孔
ⅳꢀ
31.左侧定子外壳 31a.圆槽
ⅱꢀ
31b.缓冲槽
ⅱꢀ
31c.凹槽
ⅱꢀ
31d.圆台
ⅱꢀ
31e.螺纹孔
ⅴꢀ
32.涡卷弹簧 33.防尘架 34.固定架 35.台阶衬套 36.台阶螺钉 37.微处理器 38.蓄电池 39.电池座 40.电流控制电路板 41.磁流变颗粒 42.磁流变液。
具体实施方式
44.下面结合附图描述本发明。
45.如图1至图5所示,本发明的一种磁流变式膝关节由假肢接受腔1、磁流变膝关节假肢a、小腿2和脚板3组成,其中假肢接受腔1、小腿2和脚板3为市售的零件;其中假肢接受腔1、磁流变膝关节假肢a、小腿2和脚板3自上而下顺序排列并固接;所述的磁流变膝关节假肢a由转子组件b、定子组件c、运动测量控制组件d、单轴压力传感器4和腿管连接件5组成,其中转子组件b和定子组件c的水平中心线重合;定子组件c、运动测量控制组件d、单轴压力传感器4和腿管连接件5自上而下顺序排列;转子组件b的轴承ⅰ9a外圈与定子组件c中右侧定子外壳21的圆台ⅰ21f过盈连接;转子组件b的轴承ⅱ9b外圈与定子组件c中左侧定子外壳31的圆台ⅱ31d过盈连接;运动测量控制组件d的电池座39固接于定子组件c中的右侧定子外壳21的凹槽ⅰ21e和左侧定子外壳31的凹槽ⅱ31c中;单轴压力传感器4上端面固接于定子组件c中右侧定子外壳21的螺纹孔ⅲ21g和左侧定子外壳31的螺纹孔
ⅴ
31e;腿管连接件5固接于单轴压力传感器4下端。
46.如图6至图9所示,所述的转子组件b由螺钉6、磁环固定座7、磁环8、轴承ⅰ9a、轴承ⅱ9b、动密封圈ⅰ10a、动密封圈ⅱ10b、转子外壳11、弹性膜片12、压片13、四棱台14、转子叶片15、缓冲块ⅰ16和密封堵头17组成,其中螺钉6、磁环固定座7、磁环8、轴承ⅰ9a和动密封圈ⅰ10a自右至左排列于转子外壳11右侧,其中动密封圈ⅰ10a固接于转子外壳11的内轮廓对11b的右内轮廓;轴承ⅰ9a外圈与转子外壳11中外轮廓对11c的右外轮廓过盈连接;磁环8固接于磁环固定座7下部中心;磁环固定座7近上端经螺钉6固接于转子外壳11的螺纹孔ⅰ11a;弹性膜片12、压片13和四棱台14自下而上排列,其中弹性膜片12和压片13经四棱台14固接于转子外壳11上面中心的螺纹孔ⅱ11h;转子叶片组15固接于转子外壳11内圈的卡槽11e;轴承ⅱ9和动密封圈ⅱ10b左右排列,动密封圈ⅱ10b固接于转子外壳11的内轮廓对11b的左内轮廓;轴承ⅱ9b外圈与转子外壳11中外轮廓对11c的右外轮廓过盈连接;缓冲块对ⅰ16的两个缓冲块固接于转子外壳11前面中部的缓冲槽对11d的两个缓冲槽中;密封堵头17固接于转子外壳11前面的下孔11f。按比例调配的磁流变液由转子外壳11前面的下孔11f注入磁流变
膝关节假肢,由密封堵头17进行密封。由于假肢工作期间内部升温或者夏季温度较高时,磁流变液的体积会受热膨胀,因此设计弹性膜片12来调节因温度产生的体积变化。
47.如图10至图17所示,所述的定子组件c由无油衬套18、读数头19、螺母ⅰ20a、螺母ⅱ20b、右侧定子外壳21、缓冲块ⅱ22a、缓冲块ⅲ22b、垫片ⅰ23a、垫片ⅱ23b、端盖ⅰ24a、端盖ⅱ24b、平键ⅰ25a、平键ⅱ25b、轴套26、通电线圈27、定子叶片28、导向轴29、中心轴30、左侧定子外壳31、涡卷弹簧32、防尘架33、固定架34、台阶衬套35和台阶螺钉36组成,其中缓冲块ⅱ22a固接于右侧定子外壳21的缓冲槽ⅰ21d;缓冲块ⅲ22b固接于左侧定子外壳31的缓冲槽ⅱ31b;无油衬套18固接于右侧定子外壳21的圆柱21d;读数头19固接于右侧定子外壳21的凸台21a;右侧定子外壳21上部、垫片ⅰ23a、端盖ⅰ24a、轴套26、通电线圈27、定子叶片28、导向轴29、中心轴30、端盖ⅱ24b、垫片ⅱ23b和左侧定子外壳31上部同轴排列,导向轴29穿过右侧定子外壳21上部、垫片ⅰ23a、端盖ⅰ24a、轴套26、端盖ⅱ24b、垫片ⅱ23b和左侧定子外壳31,导向轴29右端经螺母ⅰ20a固接于右侧定子外壳21的圆槽ⅰ21c;导向轴29左端经螺母ⅱ20b固接于左侧定子外壳31的圆槽ⅱ31a;中心轴30固接于两个端盖24之间,通电线圈27固接于中心轴30的主轴30a,平键25固接于中心轴30的键槽30b,定子叶片组28的叶片均匀排列并固接于轴套26内;涡卷弹簧32、防尘架33、固定架34、台阶衬套35和台阶螺钉36同轴排列,涡卷弹簧32固接于中心轴30的弹簧槽30c;台阶衬套35经台阶螺钉36固接于中心轴30的螺纹孔ⅳ30d;防尘架33与台阶衬套35旋转配合;固定架34与台阶衬套35旋转配合。
48.如图18和图19所示,所述的运动测量控制组件d由微处理器37、蓄电池38、电池座39和电流控制电路板40组成,蓄电池38固接于电池座39上端面;微处理器37固接于蓄电池38上端;电流控制电路板40固接于电池座39下端面。
49.如图20所示,为磁流变膝关节假肢的剖视图,展示了其完整装配效果。
50.如图21和图22所示,展示了磁流变膝关节假肢未工作状态和磁流变膝关节假肢工作状态的原理图。按比例调配的磁流变液由磁流变颗粒41和磁流变液42组成,当无磁场作用时,磁流变颗粒41在磁流变液42内无规则排列,不阻碍转子叶片15和定子叶片28旋转;当存在磁场作用时,磁流变颗粒41在磁流变液42内形成链状结构,产生阻力,阻碍转子叶片15和定子叶片28旋转,磁场越强产生的阻力越大;通过毕奥-萨伐尔定律可知,在线圈结构确定的情况下,磁场强度与通电线圈27的通电电流成正比。
51.如图23所示,展示了通电仿真膝关节扭矩的仿真图,其仿真的输入电流分别为1.5a、2a、2.5a和10a。由仿真可知,输入控制电流大小便可得到此电流能够使磁流变液产生多大的摩擦系数,从而得到膝关节扭矩,呈一一对应关系。因此可以通过控制线圈通电电流大小,控制磁场强度,控制磁流变液的摩擦系数,最终达到控制膝关节扭矩的目的。
52.如图24所示,展示的是磁流变式膝关节假肢控制框图,关节传感单元有由磁环8和读数头19组成的角度编码器、位于微处理器37上的惯性测量单元和单轴压力传感器4,通过模拟数字转换器a/d转换器分别将膝关节运动的角度、位置姿态、加速度、力和力矩数据信息传递给微处理器37,这些数据经微处理器37存储的运动意图识别算法和地形识别算法判断膝关节假肢的运动状态,经有限状态机算法规划下一时刻膝关节假肢所需的扭矩,以pwm信号传递给电流控制电路板40,电流控制电路板40输出相应的电流给通电线圈27,控制磁流变液的摩擦系数,配合涡卷弹簧32自身变形产生的扭矩,最终作用于膝关节假肢执行机构,依此循环,使膝关节假肢扭矩高度拟合健康人体的关节扭矩,其中关节传感单元、微处
理器37和电流控制电路板40由蓄电池38供电。
53.如图25所示,展示地形判断转变示意图,本发明采用三级分类实现对地形的判断,在一级分类中,首先识别的是站立和行走。如果患者处于站立状态,则不需要进行下阶段运动控制;如果患者在步行,第二级分类开始识别步态阶段:处于站立相还是摆动相。第三级分类的任务是识别5种稳定模式水平地面行走lg、楼梯上升sa、楼梯下降sd、坡道上升ra、坡道下降rd以及其中两两之间的过渡模式。在一级分类中,使用二次判别分析qda作为识别模型,使用前期实验测量得到的稳定模态数据来训练分类器;在二级分类中,采用阈值法确定两个步态阶段摆动和站立;在三级分类中,基于步态相位依赖方法,训练两个三级分类器,一个三级分类器识别5种稳定模式,另一个三级分类器识别过渡模式。
54.如图26所示,展示平地行走的完整步态周期的示意图,分为站立相和摆动相两个阶段,细分为站立屈曲期、站立伸展期、预摆动期、摆动屈曲期和摆动伸展期。使用二次判别分析qda和支持向量机svm作为识别模型,利用来自惯性测量单元和单轴压力传感器1的数据,在磁流变式膝关节假肢上区分过渡动作,达到运动意图识别的目的。
55.如图27至图29所示,分别展示慢速、常速和快速行走运动状态下膝关节所需扭矩曲线图。其中,曲线为健康人体运动状态下膝关节所需扭矩,从脚跟着地开始运动到脚尖离地再到下一阶段的脚跟着地为一个运动周期。在曲线上某点切线斜率体现了膝关节的刚度特性,因此,本发明使用图中所示的虚线高度拟合健康人体膝关节扭矩,以虚线斜率体现本发明膝关节假肢的刚度特性,即可用有限段的虚线代替膝关节扭矩。由磁流变液和涡卷弹簧的共同作用下提供膝关节假肢的扭矩,即磁流变液的摩擦系数和涡卷弹簧的弹性模量共同决定膝关节假肢的刚度特性。膝关节假肢上涡卷弹簧的弹性模量为一个定值,因此本发明仅需控制线圈通电电流大小,控制磁场强度,控制磁流变液的摩擦系数,输入电流值与虚线斜率呈一一对应关系。当意图识别算法和地形识别算法运行结束后,即确定当前膝关节假肢处于何种运动状态后,微处理器中的有限状态机算法判断使用哪一段虚线来拟合当前状态的膝关节扭矩曲线,便输出pwm信号使电流控制板输出相应的电流值。
56.如图30至图33所示,分别展示由站到坐到站、下楼和上/下坡一个周期下膝关节扭矩,其中曲线为健康人体运动状态下膝关节所需扭矩,虚线为控制膝关节假肢扭矩的拟合线,其控制原理与行走相同。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。