1.本发明涉及盾构机滚刀技术领域,具体地说是一种盾构机滚刀径向压力检测装置。
背景技术:
2.盾构机的前部为盾头,盾构机的掘进主要依靠盾头进行实现的,盾头的端部为刀盘,刀盘上设置有若干刀具,针对不同成分开挖成分,所使用的刀具也不同,而针对岩层则使用滚刀刀具,滚刀刀具是通过刀座转动设置在刀盘上的,在掘进过程中,盾头内部的液压系统作用在刀盘上,使刀盘将滚刀刀具压在岩层上,刀盘通过自身驱动装置带动转动,滚刀刀具公转的同时还会被动自转,对岩层进行磨削。
3.盾构机的滚刀在撞击到岩层的过程中还是持续的工作的过程中,或产生撞击力或挤压力,产生的撞击力或挤压力会因为滚刀内的圆锥滚子轴承分散成轴向力和径向力,在检测轴向力时可以通过检测滚刀内的刀轴与圆锥滚子轴承之间的相对变化值即可,而径向压力检测需要检测刀轴的形状量,现有技术中还缺少对这方面的研究。
技术实现要素:
4.本发明的目的是针对以上不足,提供一种盾构机滚刀径向压力检测装置,用于将检测滚刀受到到径向压力,并结合轴向压力检测综合对滚刀的受力进行数据分析。
5.本发明所采用技术方案是:
6.一种盾构机滚刀径向压力检测装置,设置在滚刀的刀轴上,其特征在于:包括光源发射端和光源接收端,且光源发射端和光源接收端之间设置有遮光片,所述遮光片固定设置在刀轴上,所述光源发射端发出的检测光中未被遮光片遮挡住的部分被光源接收端接收,当刀轴受径向力时,刀轴带动遮光片沿径向方向移动,光源接收端所接收到的检测光随遮光片的移动发生变化。
7.作为进一步的优化,本发明所述光源发射端发出的检测光为点状矩阵光源。
8.作为进一步的优化,本发明所述光源发射端包括发光源和光纤阵列,光纤阵列的末端通过安装板进行固定。
9.作为进一步的优化,本发明所述光源发射端包括发光源和光衍射片,发光源发出的检测光通过光衍射片再传向光源接收端。
10.作为进一步的优化,本发明所述光源接收端设置有光探测器阵列和光信号处理器,所有光探测器均与光信号处理器相连接,所述光探测器的设置数量与点状矩阵光源中光点的设置数量相对应。
11.作为进一步的优化,本发明所述光源接收端设置有光探测器阵列、光信号处理器和聚焦透镜,且光探测器阵列的设置数量少于点状矩阵光源中光点的设置数量。
12.作为进一步的优化,本发明所述光纤阵列的端部设置有光纤耦合元件,所述光纤耦合元件为透镜光纤或光纤准直器。
13.作为进一步的优化,本发明所述遮挡片上设置有透光孔。
14.作为进一步的优化,本发明所述光源发射端和光源接收端均安装在刀轴上,所述遮光片设置在刀轴轴向方向的中部,所述光源发射端和光源接收端设置在通过安装架设置在遮光片的两侧。
15.作为进一步的优化,本发明所述光源发射端和光源接收端均通过高强度弹簧与安装架相连接,所述光源发射端和光源接收端均安装在倒置的凹字型安装体内,且光源发射端和光源接收端分别设置在凹口的两侧,且遮挡片对应凹口设置。
16.本发明具有以下优点:
17.1、本发明在盾构机滚刀内设置光源发射端和光源接收端,并在光源发射端和光源接收端设置遮光板,遮光板设置在刀轴上,在刀轴承受径向力发生形变后带动遮光板移动,光源发射端发出的检测光在遮光板移动前后被光源接收端接收到的光量不同,进而可以通过光強度差计算刀轴的形变量,进而计算刀轴所承受的径向力大小;
18.2、本发明的光源发射端发出的检测光为点状矩阵光源,且点状矩阵光源可以通过光纤阵列形成或通过光衍射板形成,遮光板所遮挡的点状矩阵光源的面积越大,光源接收端所接收到的光量越少,反之越多;
19.3、本发明的还在光源接收端设置聚焦透镜,利用聚焦透镜的聚焦作用,可以降低光源发射端的光探测器的设置数量。
附图说明
20.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中描述中所需要使用的附图作简要介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
21.下面结合附图对本发明进一步说明:
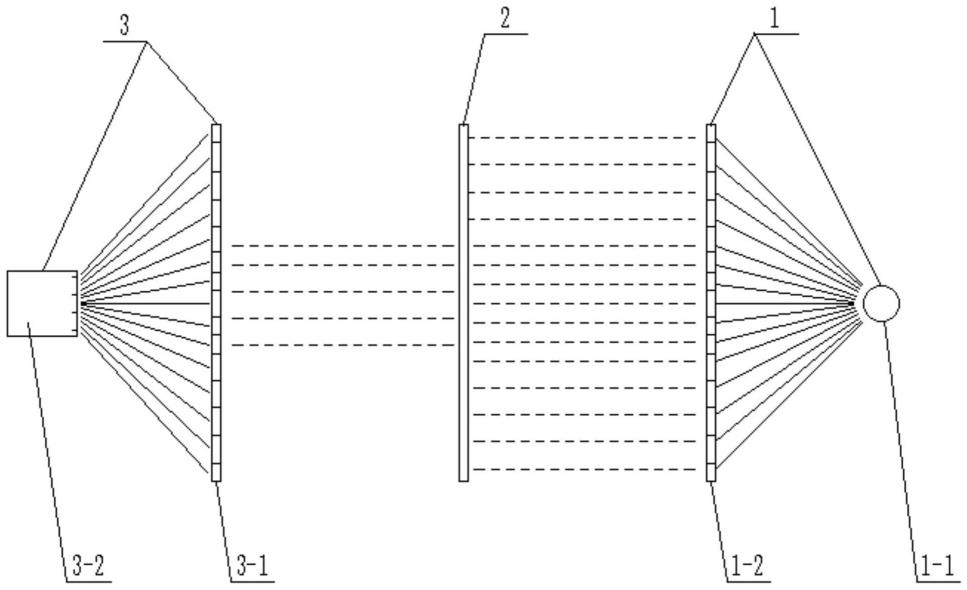
22.图1为本发明的其中一种结构组成示意图;
23.图2为遮光板发生移动后的状态示意图;
24.图3为矩阵光形成板的正视示意图;
25.图4为遮光板的正视示意图;
26.图5为本发明的另一种结构组成示意图;
27.图6为盾构机的滚刀结构示意图;
28.图7为本发明的安装结构示意图;
29.图8为滚刀承受径向力时的状态示意图。
30.其中:1、光源发射端,2、遮光板,3、光源接收端,4、聚焦透镜,5、安装架,6、高强度弹簧,1-1、发光源,1-2、矩阵光形成板,2-1、透光孔,3-1、接收器阵列,3-2、光信号处理器,a1、刀体,a2、圆锥滚子轴承,a3、刀轴。
具体实施方式
31.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定,在不冲突的情况
下,本发明实施例以及实施例中的技术特征可以相互结合。
32.需要理解的是,在本发明实施例的描述中,“第一”、“第二”等词汇,仅用于区分描述的目的,而不能理解为指示或暗示相对重要性,也不能理解为指示或暗示顺序。在本发明实施例中的“多个”,是指两个或两个以上。
33.本发明实施例中的属于“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,单独存在b,同时存在a和b这三种情况。另外,本文中字符“/”一般表示前后关联对象是一种“或”关系。
34.实施例一
35.本实施例提供一种盾构机滚刀径向压力检测装置,设置在滚刀的刀轴a3上,如图1所示,包括光源发射端1和光源接收端3,且光源发射端1和光源接收端3之间设置有遮光片2,所述遮光片2固定设置在刀轴a3上,当刀轴a3受力时,刀轴a3带动遮光片2沿径向方向移动,本实施例的主要实现原理为通过光源发射端1发射点状矩阵光源,点状矩阵光源如图2所示,光源接收端3通过设置相对应的光探测器,然后计算光探测器所接收到的光强,如图2所示,在刀轴a3在受径向力时,刀轴a3会出现弯曲形变,刀轴a3会带动遮光片2移动,遮光片2移动后,点状矩阵光源上穿过遮光片2的数量会发生变化,光源接收端所接收的光强也会发生变化,可以通过变化量反推刀轴a3的形变量,并进而通过刀轴a3的形变量来计算刀轴a3的径向受力。在具体实现上,所述光源发射端1包括发光源1-1和矩阵光形成板1-2,本实施例的矩阵光形成板1-2的设置形式为光纤阵列,光纤阵列包括若干光纤,将所有光纤的末端通过安装板进行固定形成阵列,所述光源接收端3设置有光探测器阵列3-1和光信号处理器3-2,所述光探测器阵列3-1的数据均传递给光信号处理器3-2进行处理,所述光探测器阵列3-1中光探测器的设置数量与光纤的设置数量相对应,由于光在光纤中为反射传播,因此光在穿出光纤会存在一定的偏射角,一般光探测器是对应每个光纤设置的,光线存在偏射角会影响光探测器对光的接收,因此光线阵列的末端还需要设置光线耦合元件,所述光线耦合元件可以设置成光纤透镜或光线准直器,其中光线准直器特用于将光线内的反射光转变成准直光(平行光),而光线透镜则是利用其透镜的聚焦效果改变光传播的方向。
36.在具体安装上,如图6所示的盾构机滚刀的结构图,盾构机主要包括刀轴a3和刀体a1,刀轴a3是固定设置在刀座上的,因此在工作过程中,刀轴a3是不动的,刀体a1通过圆锥滚子轴承a2转动设置在刀轴a3上,基于上述盾构机滚刀的结构,所述光源发射端1和光源接收端3均应该保持静态,即不应与刀体a1一同转动,因此在安装上,如图7所示,所述光源发射端1和光源接收端3均安装在刀轴a3上,滚刀在承受径向力时,刀轴a3的中部的形变量最大,因此,将所述遮光片2设置在刀轴a3轴向方向的中部,所述光源发射端1和光源接收端3设置在通过安装架设置在遮光片2的两侧,而且由于在作业的过程中,由于滚刀在在岩层上辊压时,会不间断的产生振动,为了消除产生的振动,所述光源发射端1和光源接收端3均通过高强度弹簧6与安装架5相连接,高强度弹簧可以提供良好支撑性的同时,还能够滤振。本实施例中,所述光源发射端1和光源接收端3均设置在一个“凹”字形的箱体内,光源发射端1的光纤矩阵和光源接收端3的光探测器阵列3-1分别设置在凹口的两侧上,光纤矩阵和光探测器矩阵位于同一安装基体上,降低光接收的接收量,降低误差。当刀轴在承受径向力时,遮光板和安装板的变化状态如图8所示。
37.本实施例,如图4所示,所述遮挡片2上设置有透光孔2-1,所述透光孔2-1可以为圆
孔、多边形孔等等,只要具有一定的规则即可,刀轴形变前后,接收器阵列3-1所接收的从遮挡片2上的透光孔2-1穿过的光的位置相应发生变化,因此可以检测光位置的变化计算刀轴a3的变化方向及变化量。
38.实施例二
39.与实施例一相比,本实施例的主要区别在于:本实施例的阵列光形成板的设置方式不同,本实施例的阵列光形成板为光衍射片,所述光衍射片选择为将光可以衍射成光点矩阵的衍射片,达到与上述光纤矩阵的相同效果。其他可以参考实施例一的设置方式。
40.实施例三
41.如图5所示,与实施例一相比,本实施例的主要区别在于:本实施例在光源接收端设置聚焦透镜4,聚焦透镜4能够起到将平行光进行聚焦的效果,即光源发射端1产生的点状矩阵光源在通过遮光板2后在穿过聚焦透镜4,聚焦透镜4将光线聚焦,投影后的面积缩小,相对应的光接收器设置数量也可以相对减少,光源发射端1的设置方式可以参考实施例一的设置方式,也可以采用实施例二的设置方式。
42.以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。