1.本技术请求保护一种农业物联网技术,尤其设计到一种基于物联网的农业生产大数据分析系统。本技术还涉及到一种基于物联网的农业生产大数据分析方法。
背景技术:
2.随着网络、通讯技术的发展,尤其是5g技术的实现,物联网技术及其应用进入了新的发展阶段,而作为传统的农业生产如果结合物联网技术,必将大幅提升生产效率。
3.目前,农业物联网技术可以有效加强农产品质量安全的监督和预警,进而有效改善农业生产管理水平。此外,基于物联网应用技术平台可以升级传统农业流程,对农作物的用药、灌溉、施肥及其相关畜牧业等实现实时监控,提高资源利用率,减少对环境的污染,特别是加强农作物疾病监控与常见传染性疫情预警,在保证农作物增产率的同时提高生产经济效益,从而实现农业现代化高效经营和可持续发展。
4.但是,现有技术在农业物联网中,监测数据种类繁多,数据量大,但是这些数据无法有效应用,还处于较低的数据使用水平。
技术实现要素:
5.为了解决上述背景技术中提到的技术问题,本技术提供一种基于物联网的农业生产大数据分析系统。本技术还涉及到一种基于物联网的农业生产大数据分析方法。
6.本技术提供一种基于物联网的农业生产大数据分析系统,包括:
7.图像获取模块,包括多个摄像装置,用于摄取图像,并将多个所述摄像装置摄取的图像进行合成,生成输出图像;
8.图像处理模块,连接在所述图像获取模块上,接收所述输出图像并根据预设的控制项,分别预处理所述输出图像,生成多个待处理图像;
9.图像分析模块,连接所述图像处理模块,接收所述待处理图像并进行图像计算分析,获得图像分析结果;
10.数据分析模块,用于根据所述图像分析结果调取农业数据,并根据所述农业数据调取相应的深度神经网络模型进行分析,获得分析结果;
11.水循环模块,根据所述分析结果,决定并执行水循环;
12.空气循环模块,根据所述分析结果,决定并执行空气循环;
13.无人机控制模块,根据所述分析结果,决定并执行消杀作业。
14.可选的,所述图像获取模块还包括:
15.像素单元,用于识别多幅所述图像的图像元素像素;
16.缩放单元,用于将所述图像元素进行缩放处理;
17.合并单元,用于将多幅所述图像进行合并。
18.可选的,所述图像处理模块还包括:
19.像素颜色识别单元;用于识别出图像元素的像素颜色;
20.像素颜色阈值单元;用于根据所述图像元素的颜色阈值,判断图像颜色程度;
21.像素颜色统一单元;用于根据所述颜色程度,将所述图像元素进行颜色统一。
22.可选的,所述无人机控制模块还包括:
23.gps单元;用于接收gps信号并确定所述无人机当前位置;
24.轨迹单元;用于根据所述当前位置,设置无人机飞行轨迹。
25.可选的,所述空气循环模块还包括:
26.二氧化碳检测单元,用于检测空气中二氧化碳的含量;
27.时间阀控制单元,用于根据所述二氧化碳含量设置所述循环时间长度。
28.本技术还提供一种基于物联网的农业生产大数据分析方法,包括:
29.采用多个摄像装置,摄取图像,并将多个所述摄像装置摄取的图像进行合成,生成输出图像;
30.接收所述输出图像并根据预设的控制项,分别预处理所述输出图像,生成多个待处理图像;
31.接收所述待处理图像并进行图像计算分析,获得分析结果;
32.根据所述图像分析结果调取农业数据,并根据所述农业数据调取相应的深度神经网络模型进行分析,获得分析结果;
33.根据所述分析结果,决定并执行水循环;
34.根据所述分析结果,决定并执行空气循环;
35.根据所述分析结果,决定并执行消杀作业。
36.可选的,所述生成输出图像还包括:
37.识别多幅所述图像的图像元素像素;
38.将所述图像元素进行缩放处理;
39.将多幅所述图像进行合并。
40.可选的,所述生成多个待处理图像还包括:
41.识别出图像元素的像素颜色;
42.根据所述图像元素的颜色阈值,判断图像颜色程度;
43.根据所述颜色程度,将所述图像元素进行颜色统一。
44.可选的,所述决定并执行消杀作业还包括:
45.接收gps信号并确定所述无人机当前位置;
46.根据所述当前位置,设置无人机飞行轨迹。
47.可选的,所述决定并执行空气循环还包括:
48.检测空气中二氧化碳的含量。
49.根据所述二氧化碳含量设置所述循环时间长度。
50.本技术相较于现有技术的优点是:
51.本技术提供一种基于物联网的农业生产大数据分析系统,包括:图像获取模块,包括多个摄像装置,用于摄取图像,并将多个所述摄像装置摄取的图像进行合成,生成输出图像;图像处理模块,连接在所述图像获取模块上,接收所述输出图像并根据预设的控制项,分别预处理所述输出图像,生成多个待处理图像;图像分析模块,连接所述图像处理模块,接收所述待处理图像并进行图像计算分析,获得分析结果;水循环模块,根据所述分析结
果,决定并执行水循环;空气循环模块,根据所述分析结果,决定并执行空气循环;无人机控制模块,根据所述分析结果,决定并执行消杀作业。本技术通过图像识别与处理,对种植物进行检测,获得分析结果后再进行相关操作处理,可有效利用大数据的同时,节省了大数据使用量,提高计算效率和反应速度。
附图说明
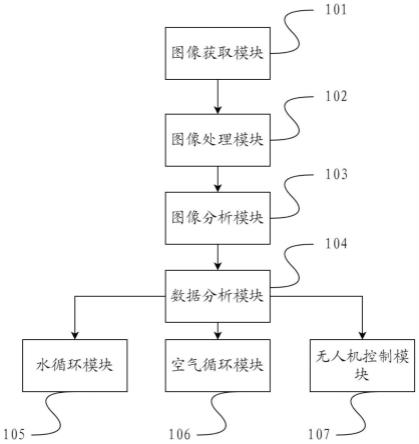
52.图1是本技术中基于物联网的农业生产大数据分析系统示意图。
53.图2是本技术中数据分析流程图。
54.图3是本技术中基于物联网的农业生产大数据分析流程图。
具体实施方式
55.以下内容均是为了详细说明本技术要保护的技术方案所提供的具体实施过程的示例,但是本技术还可以采用不同于此的描述的其他方式实施,本领域技术人员可以在本技术构思的指引下,采用不同的技术手段实现本技术,因此本技术不受下面具体实施例的限制。
56.本技术提供一种基于物联网的农业生产大数据分析系统,包括:图像获取模块,包括多个摄像装置,用于摄取图像,并将多个所述摄像装置摄取的图像进行合成,生成输出图像;图像处理模块,连接在所述图像获取模块上,接收所述输出图像并根据预设的控制项,分别预处理所述输出图像,生成多个待处理图像;图像分析模块,连接所述图像处理模块,接收所述待处理图像并进行图像计算分析,获得分析结果;水循环模块,根据所述分析结果,决定并执行水循环;空气循环模块,根据所述分析结果,决定并执行空气循环;无人机控制模块,根据所述分析结果,决定并执行消杀作业。本技术通过图像识别与处理,对种植物进行检测,获得分析结果后再进行相关操作处理,可有效利用大数据的同时,节省了大数据使用量,提高计算效率和反应速度。
57.图1是本技术中基于物联网的农业生产大数据分析系统示意图。
58.请参照图1所示,所述基于物联网的农业生产大数据分析系统,首先对图像进行处理获得图像分析结果,然后根据所述图像分析结果匹配数据分析的农业数据,并对所述农业数据进行分析,最后基于所述数据分析的分析结果进行农业生产的控制。
59.本技术中所述图像分析主要由:图像获取模块101、图像处理模块102和图像分析模块103执行,所述图像获取模块101由多个高清摄像装置组成,以完整的拍摄农业生产区域。
60.基于每个所述高清的摄像装置摄取的图像进行合成,形成输出图像,该输出图像是图像分析的基础图像。
61.所述图像获取模块101进行图像合成,是由像素单元、缩放单元和合并单元共同完成的。
62.所述像素单元识别多幅所述图像的图像元素像素。
63.所述元素是指图像中显示的每一个实体,其具有与其他元素明显的色差边界,本技术通过相邻的多个像素色差的突变,以及色差突变的连续性进行元素的识别,识别到元素后,识别每个元素中的像素。
64.缩放单元,用于将所述图像元素进行缩放处理。
65.将元素进行缩放处理包括:将相邻两幅图像中相同的元素读取出来,根据所述元素占像素多少进行倍数计算,然后根据所述倍数进行所述元素的缩放,将相同元素的大小缩放到一致。
66.合并单元,用于将多幅所述图像进行合并。
67.将经过缩放使得元素大小一致的图像,将对应的元素进行合并,实现两个图像的合并。
68.验证所述合并是否合规,表达式如下:
[0069][0070]
其中,s所述合并的两幅图像中重合的面积,所述s1是用于合并的两幅图中,第一幅图像的元素面积,所述s2是第二幅图的元素面积。所述f(s1)是第一幅图像的缩放函数,所述f(s2)是第二幅图的缩放函数,所述b是预设容差。
[0071]
所述图像处理模块102连接所述图像获取模块101,并从所述图像获取模块101中获取输出图像。所述图像处理模块102根据预先设置分析类型,分别将所述输出图像预处理为不同的待处理图像。
[0072]
具体的,所述分析类型对应于对农业生产进行控制的控制项,例如浇水、换气、喷洒农药等。
[0073]
基于不同的控制项,对所述图像进行处理,分别获得不同的分析结果。所述控制项具有多种,优选的,对所述图像进行处理分为图像颜色、图像纹理及其相互组合。
[0074]
例如,当缺少水分时,所述农作物会有蔫叶,其图像的纹理变多,同时会有黄色叶片;当缺少肥料时,所述农作物会有黄色叶片,或者高度偏低,但是不会有蔫叶;当缺少二氧化碳是,只会导致农作物生长缓慢,而不会有蔫叶或者黄叶。
[0075]
基于此,根据图像识别结果,分别获得的相关识别主题包括:蔫叶状态相关的待处理图像、黄叶状态相关的待处理图像、农作物高度相关的待处理图像。
[0076]
基于所述的各个待处理图像的识别主题,分别设置有触发阈值,在计算相关所述主题的占比后,将所述占比与所述阈值进行对比,获得该识别主题是否为真。
[0077]
例如,以所述黄叶状态相关的识别主题,通过所述图像处理模块102包括的像素颜色识别单元;用于识别出图像元素的像素颜色;像素颜色阈值单元;用于根据所述图像元素的颜色阈值,判断图像颜色程度;像素颜色统一单元;用于根据所述颜色程度,将所述图像元素进行颜色统一。
[0078]
基于处理后的图像判断所述黄色叶片占比,并将所述占比与黄色叶片阈值进行对比,获得黄叶状态是否为真的判断。
[0079]
所述数据分析模块104,用于根据所述图像分析结果调取农业数据,并根据所述农业数据调取相应的深度神经网络模型进行分析,获得分析结果。
[0080]
所述图像分析结果,主要包括有想关于各个控制项的识别主题是否为真的判断,基于所述判断调取相关与所述识别主题为真的控制项对应的数据进行进一步处理。
[0081]
所述控制项具有相对应的检测参数,该参数通过布置在所述农业种植范围内容传
感器获取,基于所述传感器的数据被收集并上传到所述数据分析模块104。
[0082]
具体的,当所述识别结果为所述识别主题为真,此时该待处理图像发送到所述数据分析模块104,所述数据分析模块104调用多个传感器获取农业数据进行处理。
[0083]
图2是本技术中数据分析流程图。
[0084]
请参照图2所示,s201,根据所述待处理图像,调取农业数据;
[0085]
s202,调取对应于所述待处理图像的深度神经网络模型;
[0086]
s203,在所述深度神经网络模型中输入所述农业数据,获得分析结果。
[0087]
然后,根据所述分析结果进行所述控制项控制,包括:水循环模块105,根据所述分析结果,决定并执行水循环;空气循环模块106,根据所述分析结果,决定并执行空气循环;无人机控制模块107,根据所述分析结果,决定并执行消杀作业。
[0088]
各个所述控制项主要有两个控制指令组成,包括开关控制和时长控制。其中,所述无人机控制模块107的控制指令还包括:
[0089]
gps单元;用于接收gps信号并确定所述无人机当前位置;
[0090]
轨迹单元;用于根据所述当前位置,设置无人机飞行轨迹。
[0091]
具体的,所述农业种植区域范围地图预先存储到所述无人机控制模块107中,且设置有预设轨迹。该无人机控制模块107读取当前位置,并计算距离所述飞行轨迹最近的路径,然后转移到所述路径后根据预设轨迹进行作业。
[0092]
所述空气循环模块106,根据所述分析结果,决定并执行空气循环时,还包括:
[0093]
调用所述空气循环模块106中的二氧化碳检测单元,检测空气中二氧化碳的含量;
[0094]
时间阀控制单元,根据所述二氧化碳含量设置所述循环时间长度。
[0095]
本技术还提供一种基于物联网的农业生产大数据分析方法。
[0096]
图3是本技术中基于物联网的农业生产大数据分析流程图。
[0097]
请参照图3所示,s301采用多个摄像装置,摄取图像,并将多个所述摄像装置摄取的图像进行合成,生成输出图像;
[0098]
所述基于物联网的农业生产大数据分析系统,首先对图像进行处理获得图像分析结果,然后根据所述图像分析结果匹配数据分析的农业数据,并对所述农业数据进行分析,最后基于所述数据分析的分析结果进行农业生产的控制。
[0099]
本技术中所述图像分析主要由:图像获取模块101、图像处理模块102和图像分析模块103执行,所述图像获取模块101由多个高清摄像装置组成,以完整的拍摄农业生产区域。
[0100]
基于每个所述高清的摄像装置摄取的图像进行合成,形成输出图像,该输出图像是图像分析的基础图像。
[0101]
所述图像获取模块101进行图像合成步骤如下:
[0102]
识别多幅所述图像的图像元素像素。
[0103]
所述元素是指图像中显示的每一个实体,其具有与其他元素明显的色差边界,本技术通过相邻的多个像素色差的突变,以及色差突变的连续性进行元素的识别,识别到元素后,识别每个元素中的像素。
[0104]
将所述图像元素进行缩放处理。
[0105]
将元素进行缩放处理包括:将相邻两幅图像中相同的元素读取出来,根据所述元
素占像素多少进行倍数计算,然后根据所述倍数进行所述元素的缩放,将相同元素的大小缩放到一致。
[0106]
将多幅所述图像进行合并。
[0107]
将经过缩放使得元素大小一致的图像,将对应的元素进行合并,实现两个图像的合并。
[0108]
验证所述合并是否合规,表达式如下:
[0109][0110]
其中,s所述合并的两幅图像中重合的面积,所述s1是用于合并的两幅图中,第一幅图像的元素面积,所述s2是第二幅图的元素面积。所述f(s1)是第一幅图像的缩放函数,所述f(s2)是第二幅图的缩放函数,所述b是预设容差。
[0111]
请参照图3所示,s302接收所述输出图像并根据预设的控制项,分别预处理所述输出图像,生成多个待处理图像;
[0112]
根据预先设置分析类型,分别将所述输出图像预处理为不同的待处理图像。
[0113]
具体的,所述分析类型对应于对农业生产进行控制的控制项,例如浇水、换气、喷洒农药等。
[0114]
基于不同的控制项,对所述图像进行处理,分别获得不同的分析结果。所述控制项具有多种,优选的,对所述图像进行处理分为图像颜色、图像纹理及其相互组合。
[0115]
例如,当缺少水分时,所述农作物会有蔫叶,其图像的纹理变多,同时会有黄色叶片;当缺少肥料时,所述农作物会有黄色叶片,或者高度偏低,但是不会有蔫叶;当缺少二氧化碳是,只会导致农作物生长缓慢,而不会有蔫叶或者黄叶。
[0116]
请参照图3所示,s303根据所述图像分析结果调取农业数据,并根据所述农业数据调取相应的深度神经网络模型进行分析,获得分析结果;
[0117]
根据图像识别结果,分别获得的相关识别主题包括:蔫叶状态相关的待处理图像、黄叶状态相关的待处理图像、农作物高度相关的待处理图像。
[0118]
基于所述的各个待处理图像的识别主题,分别设置有触发阈值,在计算相关所述主题的占比后,将所述占比与所述阈值进行对比,获得该识别主题是否为真。
[0119]
例如,以所述黄叶状态相关的识别主题包括:识别出图像元素的像素颜色;根据所述图像元素的颜色阈值,判断图像颜色程度;根据所述颜色程度,将所述图像元素进行颜色统一。
[0120]
基于处理后的图像判断所述黄色叶片占比,并将所述占比与黄色叶片阈值进行对比,获得黄叶状态是否为真的判断。
[0121]
请参照图3所示,s304接收所述待处理图像并进行图像计算分析,获得分析结果;
[0122]
所述数据分析模块104,用于根据所述图像分析结果调取农业数据,并根据所述农业数据调取相应的深度神经网络模型进行分析,获得分析结果。
[0123]
所述图像分析结果,主要包括有想关于各个控制项的识别主题是否为真的判断,基于所述判断调取相关与所述识别主题为真的控制项对应的数据进行进一步处理。
[0124]
所述控制项具有相对应的检测参数,该参数通过布置在所述农业种植范围内容传
感器获取,基于所述传感器的数据被收集并上传到所述数据分析模块104。
[0125]
具体的,当所述识别结果为所述识别主题为真,此时该待处理图像发送到所述数据分析模块104,所述数据分析模块104调用多个传感器获取农业数据进行处理。
[0126]
请参照图2所示,s201,根据所述待处理图像,调取农业数据;
[0127]
s202,调取对应于所述待处理图像的深度神经网络模型;
[0128]
s203,在所述深度神经网络模型中输入所述农业数据,获得分析结果。
[0129]
然后,根据所述分析结果进行所述控制项控制,包括:
[0130]
请参照图3所示,s305水循环模块105,根据所述分析结果,决定并执行水循环;
[0131]
请参照图3所示,s306空气循环模块106,根据所述分析结果,决定并执行空气循环;
[0132]
请参照图3所示,s307无人机控制模块107,根据所述分析结果,决定并执行消杀作业。
[0133]
各个所述控制项主要有两个控制指令组成,包括开关控制和时长控制。其中,所述无人机控制模块107的控制指令还包括:
[0134]
接收gps信号并确定所述无人机当前位置;
[0135]
根据所述当前位置,设置无人机飞行轨迹。
[0136]
具体的,所述农业种植区域范围地图预先存储到所述无人机控制模块107中,且设置有预设轨迹。该无人机控制模块107读取当前位置,并计算距离所述飞行轨迹最近的路径,然后转移到所述路径后根据预设轨迹进行作业。
[0137]
所述空气循环模块106,根据所述分析结果,决定并执行空气循环时,还包括:
[0138]
检测空气中二氧化碳的含量;
[0139]
根据所述二氧化碳含量设置所述循环时间长度。
[0140]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0141]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
