技术特征:
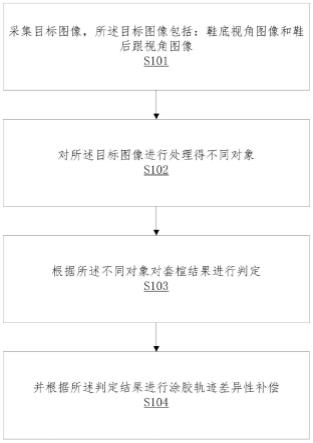
1.一种调整鞋帮涂胶轨迹的方法,其特征在于,包括步骤:采集目标图像,所述目标图像包括:鞋底视角图像和鞋后跟视角图像;对所述目标图像进行处理得不同对象;根据所述不同对象对套楦结果进行判定,并根据所述判定结果进行涂胶轨迹差异性补偿。2.根据权利要求1所述的一种调整鞋帮涂胶轨迹的方法,其特征在于,所述不同对象包括以下中的一种或多种:鞋后跟中心线、鞋面后跟边缘点、鞋楦铝块左侧边缘线、鞋楦铝块上侧边缘线;所述根据所述不同对象对套楦结果进行判定,还包括:计算所述鞋后跟中心线与所述鞋楦铝块左侧边缘线的角度,计算鞋面邦角余量的长度,计算鞋面后跟边缘点到鞋楦铝块上侧边缘线的垂直距离,根据所述角度、所述鞋面邦角余量的长度和所述垂直距离对套楦结果进行判定。3.根据权利要求2所述的一种调整鞋帮涂胶轨迹的方法,其特征在于,根据所述角度、所述鞋面邦角余量的长度和所述垂直距离对套楦结果进行判定还包括:根据所述角度判断鞋面是否歪斜;根据所述鞋面邦角余量的长度判断中底布是否位于楦底的正中央及邦角余皮外露大小是否均匀;根据所述垂直距离判断鞋面是否完全套入鞋楦。4.根据权利要求2或3所述的一种调整鞋帮涂胶轨迹的方法,其特征在于,所述并根据所述判定结果进行涂胶轨迹差异性补偿,还包括:依次将获得的所述角度、所述鞋面邦角余量的长度和所述垂直距离与标准套楦的参数进行对比,获取偏差值,根据所述偏差值进行涂胶轨迹差异性补偿。5.根据权利要求1所述的一种调整鞋帮涂胶轨迹的方法,其特征在于,所述对所述目标图像进行处理得不同对象,还包括:对所述鞋后跟视角图像进行扫描,得相应的点,并对所述相应的点进行拟合,删除异常点,再进行精确拟合得鞋后跟中心线;通过分析提取鞋楦下端铝块左侧缘侧线和鞋楦铝块上侧边缘线。6.一种存储设备,其中存储有指令集,其特征在于,所述指令集用于执行:采集目标图像,所述目标图像包括:鞋底视角图像和鞋后跟视角图像;对所述目标图像进行处理得不同对象;根据所述不同对象对套楦结果进行判定,并根据所述判定结果进行涂胶轨迹差异性补偿。7.根据权利要求6所述的一种存储设备,其特征在于,所述不同对象包括以下中的一种或多种:鞋后跟中心线、鞋面后跟边缘点、鞋楦铝块左侧边缘线、鞋楦铝块上侧边缘线;所述指令集还用于执行:所述根据所述不同对象对套楦结果进行判定,还包括:计算所述鞋后跟中心线与所述鞋楦铝块左侧边缘线的角度,计算鞋面邦角余量的长度,计算鞋面后跟边缘点到鞋楦铝块上侧边缘线的垂直距离,根据所述角度、所述鞋面邦角余量的长度和所述垂直距离对套楦结果进行判定。8.根据权利要求7所述的一种存储设备,其特征在于,所述指令集还用于执行:根据所
述角度、所述鞋面邦角余量的长度和所述垂直距离对套楦结果进行判定还包括:根据所述角度判断鞋面是否歪斜;根据所述鞋面邦角余量的长度判断中底布是否位于楦底的正中央及邦角余皮外露大小是否均匀;根据所述垂直距离判断鞋面是否完全套入鞋楦。9.根据权利要求7或8所述的一种存储设备,其特征在于,所述指令集还用于执行:所述并根据所述判定结果进行涂胶轨迹差异性补偿,还包括:依次将获得的所述角度、所述鞋面邦角余量的长度和所述垂直距离与标准套楦的参数进行对比,获取偏差值,根据所述偏差值进行涂胶轨迹差异性补偿。10.一种鞋底涂胶机器人,其特征在于,包括:3d相机、涂胶机械臂和处理器;所述3d相机,用于采集目标图像,所述目标图像包括:鞋底视角图像和鞋后跟视角图像;所述处理器用于:对所述目标图像进行处理得不同对象;根据所述不同对象对套楦结果进行判定,并根据所述判定结果进行涂胶轨迹差异性补偿;所述涂胶机械臂用于:响应处理器的指令,对鞋底进行涂胶补偿。
技术总结
本申请涉及鞋底涂胶技术领域,特别涉及一种调整鞋帮涂胶轨迹的方法、存储设备和鞋底涂胶机器人。所述一种调整鞋帮涂胶轨迹的方法,包括步骤:采集目标图像,所述目标图像包括:鞋底视角图像和鞋后跟视角图像;对所述目标图像进行处理得不同对象;根据所述不同对象对套楦结果进行判定,并根据所述判定结果进行涂胶轨迹差异性补偿。通过该方法可实现对套楦样品的偏差检测,实现自动反馈补偿。实现自动反馈补偿。实现自动反馈补偿。
技术研发人员:孙以泽 季霞 张豪 孟婥 郗欣甫
受保护的技术使用者:东华大学
技术研发日:2022.05.07
技术公布日:2022/7/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。