1.本实用新型涉及智能清洁设备技术领域,具体涉及一种小体积平面清洁机器人。
背景技术:
2.清洁机器人是智能家用电器的一种,一般来说,将完成清扫、吸尘、擦拭工作的机器人统一归为清洁机器人。能凭借一定的人工智能,自动在房间内完成地板、桌面等平地的清理工作。
3.为提高清洁效果,现有的清洁机器人中用于执行擦拭工作的装置往往包括卷式擦拭件(擦拭布或纸卷)及收卷装置,在清洁机器人移动的过程中,收卷装置通过将收卷于第一滚筒上的擦拭件逐渐收卷于第二滚筒上,以不断更新干净的擦拭面,达到极好的清洁效果。
4.然而,为实现清洁机器人的移动和收卷擦拭件,需要在行走装置和收卷装置上分别安装驱动单元,致使清洁机器人的体积较大,难以适用于小家庭和小区域,另外,存在生产成本高,重量较大的缺陷。
技术实现要素:
5.本实用新型的目的在于针对现有技术的缺陷和不足,提供一种小体积平面清洁机器人,具有清洁效果好、体积小、重量轻的优势。
6.为实现上述目的,本实用新型采用的技术方案是:一种小体积平面清洁机器人,包括:机壳、清洁机器人本体、行走装置及收卷装置,所述行走装置包括:轮单元,其安装于所述机壳底部;以及,驱动单元,其与所述轮单元传动连接,与所述清洁机器人电连接,用于驱使所述轮单元转动;所述平面清洁机器人还包括:单向传动组件,其安装于所述驱动单元和所述收卷装置之间,所述单向传动组件用于将所述驱动单元输出的动力传递给所述收卷装置以使其做单向运动。
7.所述单向传动组件包括:第一齿轮,其与所述驱动单元的动力输出端传动连接;第二齿轮,其安装于所述收卷装置上,且做单向运动;以及,惰轮,其与所述第一齿轮啮合,所述驱动单元上开设有与所述第一齿轮同心的、用于供所述惰轮安装的弧形滑槽,所述惰轮在所述第一齿轮的带动下相对于所述弧形滑槽滑动,以与所述第二齿轮啮合并传递动力或解配合。
8.所述收卷装置在收卷卷式擦拭件时,始终使擦拭面相对于其对面朝内进行收卷。
9.所述驱动单元包括:电机,其固定安装于所述机壳内;以及,齿轮减速箱,其动力输入端与所述电机的电机轴传动连接,且具有两个分别与所述轮单元和所述第一齿轮传动连接的动力输出端,其上设有所述弧形滑槽。
10.所述轮单元包括:主动带轮,其与所述齿轮减速箱传动连接;从动带轮,其转动装配于所述齿轮减速箱上;以及,履带,其安装于所述主动带轮和所述从动带轮上。
11.所述机壳底部设有凹陷空间,所述凹陷空间上对应所述第二齿轮设有通槽,所述
凹陷空间内设有支架,所述支架的上端部间隔设有第一弧形凹槽,所述支架上拆卸式安装有盖框,所述盖框上对应所述第一弧形凹槽设有与所述第一弧形凹槽组合形成通孔的第二弧形凹槽,所述收卷装置包括:第一转动件,其转动式装配于所述通孔内,其上远离所述凹陷空间一端固定连接所述第二齿轮;第二转动件,其转动装配于所述通孔内并与所述第一转动件对称,与所述第一转动件配合连接卷式擦拭件的第一端;
12.第三转动件和第四转动件,其二者均转动装配于所述通孔内,分别与所述第一转动件和所述第二转动件对称且间隔设置。
13.所述小体积平面清洁机器人还包括:张紧装置,其安装于所述机壳底部,用于压接卷式擦拭件两端间的擦拭件至使擦拭面与待清洁面接触。
14.所述平面清洁机器人还包括加湿装置,所述加湿装置安装于所述机壳内,位于所述卷式擦拭件的第一端和第二端之间并用于加湿位于其间的擦拭件。
15.所述加湿装置包括:水箱,其固定安装于所述机壳内,以及,喷水件,其通过水管与所述水箱连通,且其靠近所述卷式擦拭件的一端间隔设有多个喷水嘴。
16.所述张紧装置包括多根水平设置的张紧棍,所述喷水件设置于两条相邻的张紧棍之间,相对于所述张紧棍靠内设置,用于压接擦拭件的擦拭面使其向内凹陷。
17.采用上述技术方案后,本实用新型有益效果为:通过轮单元和收卷装置共用一个驱动,有利于缩小平面清洁机器人的体积,减轻其重量和降低其生产成本,与此同时,收卷装置依旧以单一方向收卷擦拭件,确保擦拭件不进行重复使用,以达到同样的清洁效果。
附图说明
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
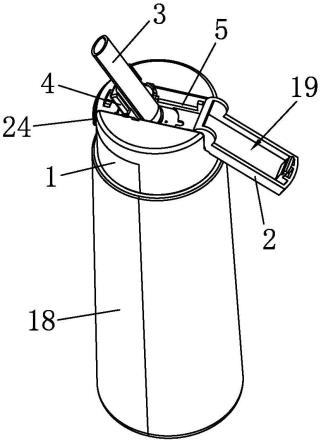
19.图1是本实用新型的爆炸图;
20.图2是本实用新型的第一结构示意图;
21.图3是本实用新型的行走装置的结构示意图;
22.图4是本实用新型的机壳、加湿装置、卷式擦拭件的结构示意图;
23.图5是本实用新型的第二结构示意图。
24.附图标记说明:1、机壳;11、凹陷空间;12、第一开口;13、导风槽;14、第二开口;15、出气孔;16、支架;17、第一弧形凹槽;18、第二弧形凹槽;19、分隔板;10、盖框;2、行走装置;21、轮单元;211、主动带轮;212、从动带轮;213、履带;22、驱动单元;221、电机;222、齿轮减速箱;2221、弧形滑槽;3、清洁机器人本体;4、收卷装置;41、第一转动件;42、第二转动件;43、第三转动件;44、第四转动件;5、卷式擦拭件;51、第一端;52、第二端;53、擦拭面;6、吸力装置;61、导管;7、清扫装置;71、滚刷;72、侧刷、8、单向传动组件;81、第一齿轮;82、第二齿轮;83、惰轮;9、加湿装置;91、水箱;92、喷水件;10、测距传感器;20、张紧装置。
具体实施方式
25.以下结合附图对本实用新型作进一步详细说明。
26.本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
27.本实施例涉及一种平面清洁机器人,其用于清洁桌面,当然也可以用于清洁地面,如图1、2所示,它包括:机壳1、行走装置2、清洁机器人本体3、收卷装置4、张紧装置20和吸力装置6。
28.其中,所述行走装置2和所述清洁机器人本体3均安装于所述机壳1上,其分别用于实现平面清洁机器人移动、控制和检测功能。收卷装置4安装于所述机壳1内,用于供卷式擦拭件5安装及将所述卷式擦拭件5第一端51的擦拭件逐渐收卷于其第二端52以更新擦拭面53,擦拭面53为卷式擦拭件5第一端和第二端之间的擦拭件上靠近目标平面的一面。张紧装置20安装于所述机壳1底部,用于压接所述擦拭件至使擦拭面53与待清洁面接触。吸力装置6沿纵向安装于所述卷式擦拭件5上方,与所述清洁机器人本体3电连接,用于将杂质吸附于擦拭面53上。
29.通过吸力装置6将目标平面上的灰尘、毛发等轻质垃圾吸附至擦拭面53上,且在收卷装置4对卷式擦拭件5逐渐过渡收卷的条件下,擦拭面53不断更新,因此,擦拭目标平面所采用的均是干净的擦拭件,能够达到更佳的清洁效果,不仅如此,在收卷已使用的擦拭件的同时,将吸附于其上的灰尘、毛发等轻质垃圾收卷达到包裹处理的效果,当卷式擦拭件5用完后可直接扔进垃圾回收箱中,也可以清洗后二次利用。无需另设垃圾收纳盒,自然也避免了清洁垃圾收纳盒的麻烦,还避免了垃圾在处理时再次污染环境的现象发生,达到了垃圾便捷处理的效果。
30.进一步地,为了对目标平面实现先吸除垃圾后擦拭的清洁步骤,以达到更佳的清洁效果,所述吸力装置6的吸气口对应所述卷式擦拭件5的第二端52和所述张紧装置20之间的区域设置,且所述卷式擦拭件5的第一端51和第二端52沿所述平面清洁机器人的前行方向依次设置,以张紧装置20作为分界线,将卷式擦拭件5的第一端51和第二端52之间的擦拭件分为两段。在平面清洁机器人移动前行的过程中,吸力装置6将目标平面上的绝大部分的轻质垃圾吸附于位于张紧装置20前端的擦拭件上,张紧装置20后端的擦拭件对该目标平面进行擦拭,而后在收卷装置4的作用下进入前端,作为目标平面的轻质垃圾附着区。
31.进一步地,为了防止附着于擦拭面53上的轻质垃圾掉落,所述收卷装置4在收卷所述擦拭件时,始终使擦拭面53相对于其对面朝内进行收卷,以实现轻质垃圾的包裹。
32.进一步地,所述机壳1底部设有供所述张紧装置20和所述收卷装置4设置的凹陷空间11,所述凹陷空间11的顶部对应所述吸气口设有第一开口12,第一开口12上固定装配有导风槽13,导风槽13上设有第二开口14,所述吸力装置6固定安装于所述凹陷空间11的顶部远离所述机架底面的一侧,所述吸气口通过所述第二开口14置入所述凹陷空间11内。凹陷空间11内形成了一个相对密闭的空间,有利于吸力装置6执行吸除工作。所述机壳1上设有出气孔15,吸力装置6的出气口安装有向所述出气孔15延伸的导管61。
33.进一步地,为了减小轻质垃圾对目标平面的吸附力,以利于将其吸起,所述机壳1底部且位于所述收卷装置4前方设置有清扫装置7,所述清扫装置7与所述清洁机器人本体3电连接。
34.具体地,所述清扫装置7包括:滚刷71和侧刷72。
35.滚刷71安装于所述机壳1底部,与所述卷式擦拭件5相对应且相互平行,用于将收卷装置4前方且位于中部的轻质垃圾扫向卷式擦拭件5。侧刷72包括两个,其安装于所述机壳1底部,且位于所述滚刷71两侧,用于将所述滚刷71两侧的垃圾扫至前端中部,由滚刷71扫向卷式擦拭件5。
36.进一步地,所述行走装置2包括:轮单元21和驱动单元22。
37.轮单元21安装于所述机壳1底部。驱动单元22与所述轮单元21传动连接,并与所述清洁机器人电连接,其用于驱使所述轮单元21转动,以实现平面清洁机器人的移动。所述驱动单元22和所述收卷装置4之间安装有单向传动组件8,所述单向传动组件8用于将所述驱动单元22输出的动力传递给所述收卷装置4以使其做单向运动,从而保持以同一方向收卷擦拭件。通过轮单元21和收卷装置4共用一个驱动,有利于缩小平面清洁机器人的体积,减轻其重量和降低其生产成本,与此同时,收卷装置4依旧以单一方向收卷擦拭件,确保擦拭件不进行重复使用,以达到同样的清洁效果。
38.在本实施例中,如图3所示,所述单向传动组件8包括:第一齿轮81、第二齿轮82和惰轮83。
39.第一齿轮81与所述驱动单元22的动力输出端传动连接。第二齿轮82安装于所述收卷装置4上。惰轮83,其与所述第一齿轮81啮合,所述驱动单元22上开设有与所述第一齿轮81同心的、用于供所述惰轮83安装的弧形滑槽2221,所述惰轮83在所述第一齿轮81的带动下相对于所述弧形滑槽2221滑动,以与所述第二齿轮82啮合并传递动力或解配合,从而实现第二齿轮82做设定的单向运动。
40.在其它实施例中,所述单向传动组件8为棘轮机构,所述棘轮机构包括:棘爪、棘轮和轮盘。其中,棘轮固定安装于收卷装置4上,棘爪对应棘轮内齿安装于轮盘上,轮盘与驱动单元22的动力输出端传动连接,并与棘轮同轴设置,棘爪在轮盘进行设定方向转动时,带动棘轮转动,从而使收卷装置4进行收卷。棘爪在轮盘进行与设定方向方向转动时,无法带动棘轮转动,以此实现收卷装置4的单向运动。
41.进一步地,如图3所示,所述驱动单元22包括:电机221和齿轮减速箱222。
42.电机221固定安装于所述机壳1内。齿轮减速箱222动力输入端与所述电机221的电机221轴传动连接,且其具有两个动力输出端,两个动力输出端分别与所述轮单元21和所述第一齿轮81传动连接。其上设有所述弧形滑槽2221。
43.进一步地,所述轮单元21包括:主动带轮211、从动带轮212和履带213。
44.其中,主动带轮211,其与所述齿轮减速箱222传动连接。从动带轮212通过转轴转动装配于所述齿轮减速箱222上。履带213安装于所述主动带轮211和所述从动带轮212上,通过履带轮能够使平面清洁机器人的移动更加平稳,以避免遇到较小障碍时无法平稳通过。
45.进一步地,为了实现收卷装置4和张紧装置20安装和卷式擦拭件5的更换,所述凹陷空间11内设有支架16,所述支架16的上端部间隔设有多个第一弧形凹槽17,所述支架16上拆卸式安装有盖框10,所述盖框10上对应所述第一弧形凹槽17设有与所述第一弧形凹槽17组合形成通孔的第二弧形凹槽18。所述凹陷空间11上对应所述第二齿轮82设有通槽。
46.所述收卷装置4包括:第一转动件41,其转动式装配于所述通孔内,其上远离所述凹陷空间11一端固定连接所述第二齿轮82。第二转动件42,其转动装配于所述通孔内并与
所述第一转动件41对称,与所述第一转动件41配合连接卷式擦拭件5的第一端51。第一转动件41和第二转动件42与卷式擦拭件5的第二端的两端部传动连接。第三转动件43和第四转动件44,其二者均转动装配于所述通孔内,与卷式擦拭件5的第一端的两端部传动连接,且分别与所述第一转动件41和所述第二转动件42对称且间隔设置。
47.更具体地,第一转动件41、第二转动件42、第三转动件43和第四转动件44均包括圆柱状的转动部以及圆台状的堵头,堵头的侧面上设有多个防滑凸起,堵头用于堵接于卷式擦拭件5的第一端和第二端的两端部内,以实现传动连接。
48.所述张紧装置20包括多根水平且间隔安装于通孔内的张紧棍,更具体地,张紧辊包括两根。
49.为了提高擦拭件对轻质垃圾的吸附力,所述平面清洁机器人还包括加湿装置9,所述加湿装置9安装于所述机壳1内,位于两根张紧棍之间并用于加湿位于其二者间的擦拭件。凹陷空间11内及盖框10上一一对应设有用于隔离所述加湿装置9的分隔板19。
50.具体地,为了实现平面清洁机器人的清扫、湿擦及干擦的多项功能,所述加湿装置9包括:水箱91和喷水件92。
51.水箱91固定安装于所述支架16上。喷水件92固定安装于盖框10上,位于两条张紧棍之间,相对于所述张紧辊靠内设置,用于压接擦拭件的擦拭面53使其向内凹陷。且喷水件92通过水管与所述水箱91连通,其靠近所述擦拭件一端沿长度方向间隔设有多个喷水嘴。
52.进一步地,为了防止平面清洁机器人在进行桌面清洁时,不慎摔落。在所述平面清洁机器人还包括多个测距传感器10,其安装于机壳1上,分别位于所述平面清洁机器人的前方和/或侧方,所述测距传感器10与所述清洁机器人本体3电连接,并向所述清洁机器人本体3传输检测数据,清洁机器人本体3对检测数值与设定值进行比较,且当检测数值大于设定值时,控制驱动单元22停止或反转以后退,以免平面清洁机器人高空摔落,造成损坏。
53.本实用新型的工作原理大致如下述:使用时,驱动电机221,电机221通过齿轮变速箱的一端输出动力以驱动轮单元21转动,平面清洁机器人前行,同时,通过齿轮变速箱的另一端输出动力以驱动第一齿轮81转动,第一齿轮81带动第二齿轮82转动从而带动第二齿轮82转动,进而带动第一转动件41转动,以将收卷于卷式擦拭件5的第一端51上擦拭件逐渐收卷于第二端52上,并实现包裹擦拭面53式收卷,达到收纳轻质垃圾及防止其掉落的效果。
54.在运行过程中,测距传感器10检测进行实时的距离检测,并将检测数据发送给清洁机器人本体3,当检测数值大于设定值时,控制电机221停止或反转以后退,以免平面清洁机器人高空摔落,造成损坏。
55.当平面清洁机器人后退时,电机221逆向转动,并通过齿轮变速箱的一端输出动力以驱动轮单元21逆向转动,平面清洁机器人后退,同时,电机221通过齿轮变速箱的另一端输出动力以驱动第一齿轮81逆向转动,第一齿轮81拨动第二齿轮82沿弧形滑槽2221向远离第二齿轮82一侧滑动,并与第二齿轮82脱离,实现了第二齿轮82和收卷装置4的单向转动,确保擦拭件不进行重复使用,以达到更有效的清洁效果。
56.以上,仅用以说明本实用新型的技术方案而非限制,本领域普通技术人员对本实用新型的技术方案所做的其它修改或者等同替换,只要不脱离本实用新型技术方案的精神和范围,均应涵盖在本实用新型的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。