1.本发明属于电磁波信号发射和接收等射频技术领域,尤其涉及一种树林遮蔽目标的探测、识别及定位方法及装置、系统。
背景技术:
2.人类获取信息的手段从最初的视觉、听觉、触觉、嗅觉和味觉,俗称“五感”,但受限于人体器官的功能,据统计,目前人类获取的信息来源中,仅有70%是依靠“五感”获取,并且这70%的信息中,超过80%是通过视觉获取的。另外30%是依靠设备来获取,且随着科技的发展,依靠设备获取信息的比例会逐渐提高。人类视觉仅可感知可见光(波长400um-700um),在电磁频谱中,可见光仅占极少部分,而无线电波、红外、紫外以及x射线等频段的应用显著拓展了人类视觉的范围,在弱化/退化视觉环境下,可以获得人眼看不见的隐匿目标和看不清的远距离目标。
3.隐匿目标的探测近些年取得了很好地发展,如在机场、车站、地铁口、重要活动入口等场所的安检仪解决了一部分违禁、违规携带的隐匿物体的探测问题,这部分物体的探测场景单一,通常以行李箱、行李袋为遮蔽体,以x射线为探测源,利用x射线的强穿透性,实现隐匿物体的成像,但因大剂量的x射线对人体健康有危害,因此x射线通常用于对行李中的隐匿违禁品进行探测。对人体携带的违禁物品的探测则更为严格,主要通过辐射小、穿透性好、分辨率较好的太赫兹或者毫米波频段来实现,在w波段(75-110ghz),分辨能力可达2mm甚至更优,足以识别管制刀具、枪支、弹药等人体携带的隐匿物体。在城市建设、资源勘察等应用中,对地下浅层目标(如地下管道、隧道、矿产分布)的探测需要依赖l波段(1-2ghz)及以下的电磁波来实现,这主要是因为电磁波频率越低,穿透能力越强,可探测更远的距离,但纵向分辨率越差。因此针对不同深度、不同尺寸的目标,应合理选择电磁波频段。对于地下目标或者冰下目标,根据待探测目标的类型,目前有相应频段的探地雷达可以完成探测。
4.然而,隐匿目标的种类繁多,根据遮蔽体的不同,可以分为建筑物、泥土、纺织物、树林等,对建筑物、泥土、纺织物遮蔽的隐匿目标的探测技术比较成熟,但对树林遮蔽目标的探测尚无很好的解决方案。传统方法主要依靠红外、超声和分米波探测方式,红外探测主要依据黑体热辐射机理,但白天易受树林热辐射影响,夜晚易受地表辐射的影响,导致背景噪声过大,无法形成清晰的图像。超声探测由于作用距离短,通常仅有几十米甚至更短距离,探测覆盖面积小,且树叶回波干扰以及树叶振动干扰导致探测灵敏度低,虚假目标多。分米波探测方式主要采用低频段(30-1000mhz)超宽带机载sar成像的办法探测树林遮蔽目标,由于采用了合成孔径的方式,在距离向的分辨率得到了很好地提高,在一定程度上可以发现卡车等电大尺寸目标,但由于需要在整幅图像中进行目标标记,因此,漏记、误记概率较高。并且,sar成像探测主要针对树林表层,用于描绘树林形貌,而对树林遮蔽物探测能力较弱。
5.树林遮蔽与其它遮蔽物,如泥土、建筑物有明显的差别,树林包含树叶、树枝、树
干,对于电磁波探测技术,电磁波入射波和回波均需经过多层树叶散射、树枝散射,因此散射信号极为复杂,待测目标的回波可能被树叶等散射信号淹没,因而难以准确获得树林遮蔽目标的信息。
6.综上所述,针对树林遮蔽目标,现有探测技术无法取得很好的效果,主要原因在于树叶和树枝的散射、吸收,使可见光、红外光几乎无法穿透多层交错树叶形成的冠层,即使是低频段的电磁波也仅有一小部分能穿透冠层,到达树林遮蔽目标区域。并且树林种类、树叶特性的不同带来的回波信号有所不同,给目标的探测增加了难度,目标的探测准确性低,探测结果的可信度差,实用价值不明显。
技术实现要素:
7.针对现有技术的不足,本技术实施例的目的是提供一种树林遮蔽目标的探测、识别及定位方法及装置、系统,采用距离切片思想,滤除多径干扰,以及部分树叶、树冠散射干扰,并利用深度学习方法,通过采集样本库进行训练,形成网络模型,通过已训练的模型对目标散射信号特性进行识别,从而实现树林遮蔽目标的探测与识别。
8.根据本技术实施例的第一方面,提供一种树林遮蔽目标的探测、识别及定位方法,包括:获取来自树叶、树冠、被探测目标以及地面的输入信号;对所述输入信号进行距离维傅里叶变换、距离切片及滤除多径散射和树叶树冠散射信息,得到预处理信号;将所述预处理信号进行角度维fft变换和恒虚警检测,得到处理信号;将所述处理信号分别输入训练好的树林散射特性模型和遮蔽目标散射特性模型中,对应得到树林遮蔽目标的位置信息和类别。
9.进一步地,所述树林散射特性模型的训练过程包括:采集若干种树林的第一样本;测试所述第一样本的雷达散射特性,提取所述第一样本对应的第一散射参数,根据所述第一散射参数和所述第一散射参数对应的第一标签,构建第一雷达散射信号样本库,其中所述第一标签包括树叶类型和树林类型;设置第一目标训练参数;根据所述第一雷达散射信号样本库,进行深度学习模型训练;根据所述第一目标训练参数,判断训练是否结束;若训练未结束,则更新所述深度学习模型的网络参数,返回根据所述第一雷达散射信号样本库进行深度学习模型训练的步骤;若训练结束,则将训练后的深度学习模型作为树林散射特性模型。
10.进一步地,所述遮蔽目标散射特性模型的训练过程包括:采集若干种遮蔽目标的第二样本;测试所述第二样本的雷达散射特性,提取所述第二样本对应的第二散射参数,根据所述第二散射参数和所述第二散射参数对应的第二标签,构建第二雷达散射信号样本库,其中所述第二标签包括所述第二样本的类别;设置第二目标训练参数;
根据所述第二雷达散射信号样本库,进行深度学习模型训练;根据所述第二目标训练参数,判断训练是否结束;若训练未结束,则更新所述深度学习模型的网络参数,返回根据所述第二雷达散射信号样本库进行深度学习模型训练的步骤;若训练结束,则将训练后的深度学习模型作为遮蔽目标散射特性模型。
11.根据本技术实施例的第二方面,提供一种树林遮蔽目标的探测、识别及定位装置,包括:获取模块,用于获取来自树叶、树冠、被探测目标以及地面的输入信号;预处理模块,用于对所述输入信号进行距离维傅里叶变换、距离切片及滤除多径散射和树叶树冠散射信息,得到预处理信号;处理模块,用于将所述预处理信号进行角度维fft变换和恒虚警检测,得到处理信号;输入模块,用于将所述处理信号输入训练好的树林散射特性模型库和遮蔽目标散射特性模型库中,得到树林遮蔽目标的类别和位置信息。
12.根据本技术实施例的第三方面,提供一种树林遮蔽目标的探测、识别及定位系统,包括雷达探测子系统,所述雷达探测子系统用于发射探测信号,接收来自树叶、树冠、被探测目标以及地面的散射信号,对所述散射信号进行分析和处理,得到来自树叶、树冠、被探测目标以及地面的输入信号;处理器,所述处理器用于获取来自树叶、树冠、被探测目标以及地面的输入信号;对所述输入信号进行距离维傅里叶变换、距离切片及滤除多径散射和树叶树冠散射信息,得到预处理信号;将所述预处理信号进行角度维fft变换和恒虚警检测,得到处理信号;将所述处理信号输入训练好的树林散射特性模型库和遮蔽目标散射特性模型库中,得到树林遮蔽目标的类别和位置信息。
13.进一步地,所述雷达探测子系统包括:信号控制与处理单元,所述信号控制与处理单元用于发送控制信号生成的指令和对接收到的信号进行分析和处理;发射信号链路,所述发射信号链路根据所述信号控制与处理单元发送的指令生成探测信号;发射天线,所述发射天线用于发射所述探测信号;接收天线阵列,所述接收天线阵列用于接收来自树叶、树冠、被探测目标以及地面的散射信号;接收信号链路,所述接收信号链路用于将所述散射信号传输至所述信号控制与处理单元。
14.根据本技术实施例的第四方面,提供一种电子设备,包括:一个或多个处理器;存储器,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如第一方面所述的树林遮蔽目标的探测、识别及定位方法。
15.根据本技术实施例的第五方面,提供一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现如第一方面所述的树林遮蔽目标的探测、识别及定位方法的步骤。
16.本技术的实施例提供的技术方案可以包括以下有益效果:由上述实施例可知,本技术在大功率脉冲雷达的基础上,通过实测引入不同叶型、树林雷达散射样本库,树林遮蔽目标电磁散射样本库,并进行深度学习训练,形成网络模型;将探测到的电磁散射信号输入训练好的树林散射特性模型和遮蔽目标散射特性模型中,网络可识别目标类型,并根据平面探测阵列通道相位差确定目标的位置信息,从而实现树林遮蔽目标的探测、识别及定位。本发明可以提高树林遮蔽目标的探测、识别和定位能力,可以弥补现有技术的不足。
17.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
附图说明
18.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
19.图1是根据一示例性实施例示出的一种树林遮蔽目标的探测、识别及定位方法的流程图。
20.图2是根据一示例性实施例示出的距离维fft结果示意图。
21.图3是根据一示例性实施例示出的树林散射特性模型的训练过程的流程图。
22.图4是根据一示例性实施例示出的遮蔽目标散射特性模型的训练过程的流程图。
23.图5是根据一示例性实施例示出的一种树林遮蔽目标的探测、识别及定位装置的框图。
24.图6是根据一示例性实施例示出的雷达探测子系统的示意图。
25.图7是根据一示例性实施例示出的信号控制与处理单元的电路板的结构设计图。
26.图8是根据一示例性实施例示出的电子设备的示意图。
27.附图标记说明:101、信号控制与处理单元;102、发射信号链路;103、发射天线;104、接收信号链路;105、接收天线阵列;106、雷达探测子系统。
具体实施方式
28.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。
29.在本技术使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术。在本技术和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
30.应当理解,尽管在本技术可能采用术语第一、第二、第三等来描述各种信息,但这
些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本技术范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。取决于语境,如在此所使用的词语“如果”可以被解释成为“在
……
时”或“当
……
时”或“响应于确定”。
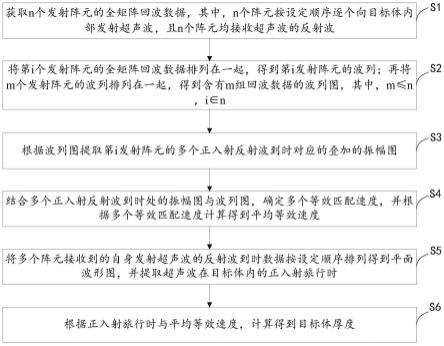
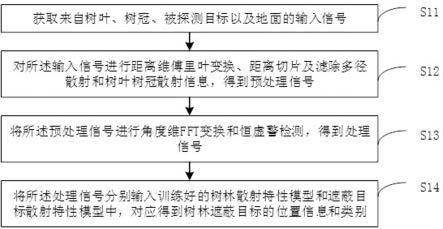
31.图1是根据一示例性实施例示出的一种树林遮蔽目标的探测、识别及定位方法的流程图,如图1所示,该方法应用于处理器中,可以包括:步骤s11:获取来自树叶、树冠、被探测目标以及地面的输入信号;步骤s12:对所述输入信号进行距离维傅里叶变换、距离切片及滤除多径散射和树叶树冠散射信息,得到预处理信号;步骤s13:将所述预处理信号进行角度维fft变换和恒虚警检测,得到处理信号;步骤s14:将所述处理信号分别输入训练好的树林散射特性模型和遮蔽目标散射特性模型中,对应得到树林遮蔽目标的位置信息和类别。
32.由上述实施例可知,本技术在大功率脉冲雷达的基础上,通过实测引入不同叶型、树林雷达散射样本库,树林遮蔽目标电磁散射样本库,并进行深度学习训练,形成网络模型;将探测到的电磁散射信号输入训练好的树林散射特性模型和遮蔽目标散射特性模型中,网络可识别目标类型,并根据平面探测阵列通道相位差确定目标的位置信息,从而实现树林遮蔽目标的探测、识别及定位。本发明可以提高树林遮蔽目标的探测、识别和定位能力,可以弥补现有技术的不足。
33.在步骤s11的具体实施中,获取来自树叶、树冠、被探测目标以及地面的输入信号;具体地,通过雷达探测接收系统天线阵列获取输入信号,并通过射频前端的低噪声放大器进行第一级放大,下变频器进行变频至中频信号,再经过中频放大器进一步放大,中频滤波器滤波后,最后经过a/d采样,将获取的输入信号变成数字信号。通过射频前端的低噪声放大、下变频器及中频放大器、滤波器后,输入信号从高频模拟信号变为低频模拟信号,降低了后续电路处理难度,通过中频a/d采样,将模拟信号变为数字信号,方便后续信号的变换与处理。
34.在步骤s12的具体实施中,对所述输入信号进行距离维傅里叶变换、距离切片及滤除多径散射和树叶树冠散射信息,得到预处理信号;具体地,对12bit a/d采集到的信号分为i\q两组,i为实部、q为虚部,使用傅里叶变换工具对i j
·
q信号进行距离维fft运算,取8192个点,假设雷达系统距离地面高度为h,则每一个距离格点代表的距离为h/4096,经过傅里叶变换后的数据存放方式为:横向为距离点,纵向为信号相对强度。对信号强度最大的点及坐标记为(nm, im),提取信号强度高于0.01
·im
对应的距离点信息,提取距离维后段12.5%的数据点作为有用信息段,得到预处理信号。通过提取信号强度高于0.01
·im
对应的距离点信息,有效滤除了雷达系统噪声干扰,如图2所示,通过提取距离维后端12.5%的数据点作为有用信息段,滤除了绝大部分树叶、树干、树冠的散射信息。
35.在步骤s13的具体实施中,将所述预处理信号进行角度维fft变换和恒虚警检测,得到处理信号;具体地,将预处理信号使用角度维fft函数进行变换,选取128
×
128个变换格点,将
±
90
°
二维平面空间均匀划分为128
×
128个角度空间,将角度信息与信号相对强度信息
存储于三维矩阵中,矩阵其中一维信息是信号的相对强度,另外两维为平面角度信息。接下来对三维矩阵中的数据进行恒虚警检测,设置阈值为0.005
·im
,设置一圈保护单元,共9个,使用平均恒虚警检测算法,对信号进行恒虚警检测,将检测结果输出至另一个矩阵中,记为矩阵b。矩阵b包含了处理后信号的强度信息和角度坐标信息。使用角度维fft变换,将获取到的信号强度在平面空间内进行映射,从而确定散射信号的目标物的角度信息,为目标的定位提供数据支撑。通过恒虚警检测,剔除背景噪声和闪烁噪声,提高了探测结果的可靠性。
36.在步骤s14的具体实施中,将所述处理信号分别输入训练好的树林散射特性模型和遮蔽目标散射特性模型中,对应得到树林遮蔽目标的位置信息和类别。
37.具体地,如图3所示,所述树林散射特性模型的训练过程可以包括:步骤s21:采集若干种树林的第一样本;步骤s22:测试所述第一样本的雷达散射特性,提取所述第一样本对应的第一散射参数,根据所述第一散射参数和所述第一散射参数对应的第一标签,构建第一雷达散射信号样本库,其中所述第一标签包括树叶类型和树林类型;步骤s23:设置第一目标训练参数;步骤s24:根据所述第一雷达散射信号样本库,进行深度学习模型训练;步骤s25:根据所述第一目标训练参数,判断训练是否结束;步骤s26:若训练未结束,则更新所述深度学习模型的网络参数,返回根据所述第一雷达散射信号样本库进行深度学习模型训练的步骤;若训练结束,则将训练后的深度学习模型作为树林散射特性模型。
38.在步骤s21-步骤s26的具体实施中,所述树林选自针叶林、阔叶林、针叶阔叶混交林、红树林、灌木林中的一种或多种,通过旋转雷达从不同角度采集雷达散射信号,角度范围覆盖
±
60
°
立体角空间,雷达的安装高度为10-100倍树林高度。通过旋转雷达角度以构建全面的树林样本散射信号第一样本库,为模型训练提供更多的样本数据。
39.具体地,如图4所示,所述遮蔽目标散射特性模型的训练过程可以包括:步骤s31:采集若干种遮蔽目标的第二样本;步骤s32:测试所述第二样本的雷达散射特性,提取所述第二样本对应的第二散射参数,根据所述第二散射参数和所述第二散射参数对应的第二标签,构建第二雷达散射信号样本库,其中所述第二标签包括所述第二样本的类别;步骤s33:设置第二目标训练参数;步骤s34:根据所述第二雷达散射信号样本库,进行深度学习模型训练;步骤s35:根据所述第二目标训练参数,判断训练是否结束;步骤s36:若训练未结束,则更新所述深度学习模型的网络参数,返回根据所述第二雷达散射信号样本库进行深度学习模型训练的步骤;若训练结束,则将训练后的深度学习模型作为遮蔽目标散射特性模型。
40.在步骤s31-步骤s36的具体实施中,所述遮蔽目标选自人、大型野生动物、机动车、坦克、装甲车、发射车中的一种或者多种,对机动车、坦克、装甲车、发射车制造同比例实体模型,并在树林散射特性模型训练时涉及的树林遮蔽下开展雷达散射测试,获取第二样本。雷达安装高度为10-100倍树林高度,机动车、坦克、装甲车、发射车模型藏匿在树林地下,并
确保在雷达安装位置不能被光学摄像头查看到,通过旋转雷达采集更全面的第二样本库,旋转角度范围为
±
60
°
立体空间。
41.模型训练结束后,将所述处理信号分别输入训练好的树林散射特性模型和遮蔽目标散射特性模型中,对应得到树林遮蔽目标的位置信息和类别,两个模型均选用三层神经网络架构,包括输入层、隐藏层、输出层。输入层为所述处理信号的三维矩阵形式,矩阵大小为[65536
×
65536
×
12bit]隐藏层的卷积核为4
×
4,步长为4,选用2
×
2最大池化方式,输出层输出数据大小为1.28gbit,数据存储于ddr模块中。
[0042]
与前述的树林遮蔽目标的探测、识别及定位方法的实施例相对应,本技术还提供了树林遮蔽目标的探测、识别及定位装置的实施例。
[0043]
图5是根据一示例性实施例示出的一种树林遮蔽目标的探测、识别及定位装置框图。参照图5,该装置可以包括:获取模块21,用于获取来自树叶、树冠、被探测目标以及地面的输入信号;预处理模块22,用于对所述输入信号进行距离维傅里叶变换、距离切片及滤除多径散射和树叶树冠散射信息,得到预处理信号;处理模块23,用于将所述预处理信号进行角度维fft变换和恒虚警检测,得到处理信号;输入模块24,用于将所述处理信号输入训练好的树林散射特性模型库和遮蔽目标散射特性模型库中,得到树林遮蔽目标的类别和位置信息。
[0044]
关于上述实施例中的装置,其中各个模块执行操作的具体方式已经在有关该方法的实施例中进行了详细描述,此处将不做详细阐述说明。
[0045]
对于装置实施例而言,由于其基本对应于方法实施例,所以相关之处参见方法实施例的部分说明即可。以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本技术方案的目的。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
[0046]
本技术还提供一种树林遮蔽目标的探测、识别及定位系统,包括雷达探测子系统106和处理器,所述雷达探测子系统106用于发射探测信号,接收来自树叶、树冠、被探测目标以及地面的散射信号,对所述散射信号进行分析和处理,得到来自树叶、树冠、被探测目标以及地面的输入信号;所述处理器用于获取来自树叶、树冠、被探测目标以及地面的输入信号;对所述输入信号进行距离维傅里叶变换、距离切片及滤除多径散射和树叶树冠散射信息,得到预处理信号;将所述预处理信号进行角度维fft变换和恒虚警检测,得到处理信号;将所述处理信号输入训练好的树林散射特性模型库和遮蔽目标散射特性模型库中,得到树林遮蔽目标的类别和位置信息。
[0047]
具体地,如图6所示,所述雷达探测子系统106包括信号控制与处理单元101、发射信号链路102、发射天线103、接收天线阵列105、接收信号链路104,所述信号控制与处理单元101用于发送控制信号生成的指令和对接收到的信号进行分析和处理;所述发射信号链路102根据所述信号控制与处理单元101发送的指令生成探测信号;所述发射天线103用于发射所述探测信号;所述接收天线阵列105用于接收来自树叶、树冠、被探测目标以及地面
的散射信号;所述接收信号链路104用于将所述散射信号传输至所述信号控制与处理单元101。
[0048]
在具体实施中,信号控制与处理单元101可以包括fpga、dsp(digital signal processing,数字信号处理)模块、电源管理模块、散热模块、数据存储ddr模块、多层印制电路板。fpga主要用于接口电路,逻辑电路控制及通过srio接口与dsp进行高速数据交换;dsp选用多核高性能系列,当待处理数据量过大时,可多芯片并行使用;电源管理模块包含大功率dc-dc、ldo芯片、隔离电源芯片;散热模块包含散热片及散热风扇、温控传感器及反馈电路;数据存储ddr模块包含高速ddr存储器,可单颗或多颗并行使用;多层印制电路板板材为fr-4板材。信号控制与处理单元101的硬件电路参数如表1所示。
[0049]
表1 信号控制与处理单元101硬件电路参数表
名称型号名称型号dsp模块tms320c6678
×
4颗dc/dcfed60-12s05-hc、irf系列fpga5sgsmd5k3f40c4n
×
1颗ldotps系列数据存储ddr模块mt47h64m16nf
×
8颗电阻、电容顺络电子多层印制电路板fr-4混压温度、湿度hdc系列
信号控制与处理单元101的电路板的结构设计如图7所示,选用fr4的板材进行层压,共8层,板厚度为1.4~1.5mm。
[0050]
发射链路包含锁相源、滤波器、脉冲调制电源、脉宽功率放大器、隔离器、射频电缆;接收链路包含低噪声放大器、下变频模块、滤波模块、中频放大模块、模拟/数字转换模块。所述发射信号链路102包含脉冲信号发生器、前级放大器、驱动级放大器、滤波器、末级放大模块、射频电缆、微带线电路;所述接收信号链路104包含低噪声放大器、滤波器、下变频模块、中频放大器、模拟/数字转换模块、射频电缆、微带线电路所述发射天线103发射微波脉冲,所述微波脉冲功率为10瓦至100千瓦,所述微波脉冲持续时间为100纳秒至1000纳秒,所述发射天线103为喇叭天线、波导缝隙天线、透镜天线、对数周期天线、交叉偶极子天线的一种;所述微波脉冲工作频率为10兆赫兹至30000兆赫兹。
[0051]
所述接收天线阵列105为平面阵列,阵元数量至少4个,所述接收天线为微带贴片天线、波导天线、对数周期天线、喇叭天线、交叉偶极子天线的一种,本实施例中接收天线阵列105选用喇叭天线阵,2
×
2方阵,阵元间距为半波长,天线的主要指标:增益≥8db,主副瓣电平比小于-14db,驻波比小于2,相对带宽>10%。发射天线103选用喇叭天线,天线增益≥8db,主副瓣电平比小于-15db,驻波比小于1.8,相对带宽>15%,天线与发射电路选用低损耗射频电缆连接。
[0052]
在具体实施中,通常树林离地面高度小于50米,雷达系统架空于地面100米左右,发射频率为250-350mhz电磁波,脉冲功率为1kw,脉冲占空比1%-5%,脉冲持续时间0.2-2微秒。
[0053]
接收电路噪声系数为3db,增益为0~60db,前端限幅器耐受2w以上功率,前级lna抗烧毁电平高于20dbm,中频信号频率/带宽为70/20mhz,中频滤波器承受功率大于2w。
[0054]
相应的,本技术还提供一种电子设备,包括:一个或多个处理器;存储器,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或
多个处理器实现如上述的树林遮蔽目标的探测、识别及定位方法。如图8所示,为本发明实施例提供的一种树林遮蔽目标的探测、识别及定位方法所在任意具备数据处理能力的设备的一种硬件结构图,除了图8所示的处理器、内存以及网络接口之外,实施例中装置所在的任意具备数据处理能力的设备通常根据该任意具备数据处理能力的设备的实际功能,还可以包括其他硬件,对此不再赘述。
[0055]
相应的,本技术还提供一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现如上述的树林遮蔽目标的探测、识别及定位方法。所述计算机可读存储介质可以是前述任一实施例所述的任意具备数据处理能力的设备的内部存储单元,例如硬盘或内存。所述计算机可读存储介质也可以是风力发电机的外部存储设备,例如所述设备上配备的插接式硬盘、智能存储卡(smart media card,smc)、sd卡、闪存卡(flash card)等。进一步的,所述计算机可读存储介还可以既包括任意具备数据处理能力的设备的内部存储单元也包括外部存储设备。所述计算机可读存储介质用于存储所述计算机程序以及所述任意具备数据处理能力的设备所需的其他程序和数据,还可以用于暂时地存储已经输出或者将要输出的数据。本领域技术人员在考虑说明书及实践这里公开的内容后,将容易想到本技术的其它实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包括本技术未公开的本技术领域中的公知常识或惯用技术手段。
[0056]
应当理解的是,本技术并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。