技术特征:
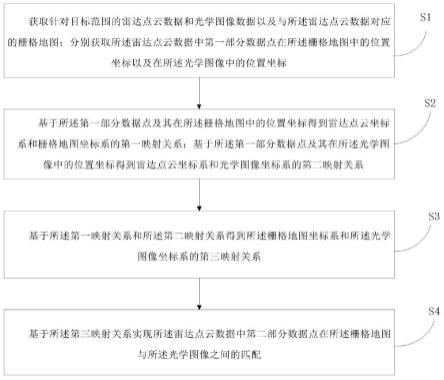
1.一种栅格地图与光学图像匹配方法,其特征在于,包括:获取针对目标范围的雷达点云数据和光学图像数据以及与所述雷达点云数据对应的栅格地图;分别获取所述雷达点云数据中第一部分数据点在所述栅格地图中的位置坐标以及在所述光学图像中的位置坐标;基于所述第一部分数据点及其在所述栅格地图中的位置坐标得到雷达点云坐标系和栅格地图坐标系的第一映射关系;基于所述第一部分数据点及其在所述光学图像中的位置坐标得到雷达点云坐标系和光学图像坐标系的第二映射关系;基于所述第一映射关系和所述第二映射关系得到所述栅格地图坐标系和所述光学图像坐标系的第三映射关系;基于所述第三映射关系实现所述雷达点云数据中第二部分数据点在所述栅格地图与所述光学图像之间的匹配。2.根据权利要求1所述的栅格地图与光学图像匹配方法,其特征在于,所述获取针对目标范围的雷达点云数据和光学图像数据以及与所述雷达点云数据对应的栅格地图,包括:通过固定于移动承载平台上的毫米波雷达与光学摄像头,分别获取雷达点云数据和光学图像数据,将所述雷达点云数据进行slam算法处理得到栅格地图;其中,所述毫米波雷达与所述光学摄像头的几何位置固定。3.根据权利要求1所述的栅格地图与光学图像匹配方法,其特征在于,所述第一映射关系和所述第二映射关系基于单应性变换得到。4.根据权利要求3所述的栅格地图与光学图像匹配方法,其特征在于,所述基于所述第一映射关系和所述第二映射关系得到所述栅格地图坐标系和所述光学图像坐标系的第三映射关系包括:利用所述第一映射关系中的第一常数、第一单应性矩阵以及所述第二映射关系中的第二常数、第二单应性矩阵,确定所述第三映射关系中的第三常数和转换矩阵;利用所述第三映射关系中的第三常数和转换矩阵,得到基于单应性变换的所述第三映射关系。5.根据权利要求4所述的栅格地图与光学图像匹配方法,其特征在于,所述第一映射关系为:所述第二映射关系为:所述第三映射关系为:
其中,(x
r
,y
r
)为数据点在雷达点云坐标系的位置坐标;(x
m
,y
m
)为数据点在栅格地图坐标系的位置坐标;(u,v)为数据点在光学图像坐标系的位置坐标;p
i
为第i帧雷达点云数据在雷达点云坐标系和栅格地图坐标系之间的第一单应性矩阵;h为一帧雷达点云数据在雷达点云坐标系和光学图像坐标系之间的第二单应性矩阵;p
i
h-1
为栅格地图坐标系与光学图像坐标系之间的转换矩阵;s1为第一常数;s2为第二常数;s为第三常数。6.根据权利要求1所述的栅格地图与光学图像匹配方法,其特征在于,所述第一部分数据点基于光学图像中的目标对象获取。7.根据权利要求1所述的栅格地图与光学图像匹配方法,其特征在于,所述基于所述第三映射关系实现所述雷达点云数据中第二部分数据点在所述栅格地图与所述光学图像之间的匹配包括:确定所述雷达点云数据中第二部分数据点在所述栅格地图中的位置坐标;基于所述第二部分数据点在所述栅格地图中的位置坐标和所述第三坐标映射关系,确定所述第二部分数据点在所述光学图像中的位置坐标。8.一种栅格地图与光学图像匹配装置,其特征在于,包括:获取单元:用于获取针对目标范围的雷达点云数据和光学图像数据以及与所述雷达点云数据对应的栅格地图;分别获取所述雷达点云数据中第一部分数据点在所述栅格地图中的位置坐标以及在所述光学图像中的位置坐标;变换单元:用于基于所述第一部分数据点及其在所述栅格地图中的位置坐标得到雷达点云坐标系和栅格地图坐标系的第一映射关系;基于所述第一部分数据点及其在所述光学图像中的位置坐标得到雷达点云坐标系和光学图像坐标系的第二映射关系;基于所述第一映射关系和所述第二映射关系得到所述栅格地图坐标系和所述光学图像坐标系的第三映射关系;匹配单元:用于基于所述第三映射关系实现所述雷达点云数据中第二部分数据点在所述栅格地图与所述光学图像之间的匹配。9.一种计算机设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的计算机指令,所述计算机指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-7中任一项所述的方法。10.一种计算机可读存储介质,其上存储有计算机指令,其特征在于,所述计算机指令用于使计算机执行权利要求1至7中任一项所述的方法。
技术总结
本申请涉及栅格地图与光学图像匹配方法和装置,包括:获取针对目标范围的雷达点云数据和光学图像数据及与雷达点云数据对应的栅格地图;分别获取雷达点云数据中第一部分数据点在栅格地图中的位置坐标及在光学图像中的位置坐标;基于第一部分数据点及其在栅格地图中的位置坐标得到雷达点云坐标系和栅格地图坐标系的第一映射关系;基于第一部分数据点及其在光学图像中的位置坐标得到雷达点云坐标系和光学图像坐标系的第二映射关系;基于第一映射关系和第二映射关系得到栅格地图坐标系和光学图像坐标系的第三映射关系;基于第三映射关系实现雷达点云数据中第二部分数据点在栅格地图与光学图像之间的匹配。本申请能将栅格地图与光学图像进行匹配。格地图与光学图像进行匹配。格地图与光学图像进行匹配。
技术研发人员:李洋 魏永辉 王彦平 申文杰 林赟
受保护的技术使用者:北方工业大学
技术研发日:2022.04.12
技术公布日:2022/7/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。