1.本实用新型涉及农业机械技术领域,具体为一种用于萝卜收获机器人的送料机构。
背景技术:
2.萝卜为常见的一种农作物,萝卜根作蔬菜食用;种子、鲜根、枯根、叶皆入药,种子消食化痰,鲜根止渴、助消化,枯根利二便,叶治初痢,并预防痢疾,种子榨油工业用及食用,萝卜一般生长在土壤内,萝卜根茎一般入土较深。
3.现有的萝卜自动收获设备将萝卜采收切叶后,无法将竖直状态的萝卜翻转送料,大多通过侧置输送皮带将萝卜竖直夹持输送,萝卜的夹持稳定性差,且由于萝卜的规格不同,容易出现脱落现象。因此,为解决上述问题,现提出一种用于萝卜收获机器人的送料机构。
技术实现要素:
4.本实用新型目的是提供一种用于萝卜收获机器人的送料机构,以解决现有技术中萝卜自动收获设备无法将竖直状态的萝卜翻转送料,且夹持稳定性差,使用较为局限的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种用于萝卜收获机器人的送料机构,该送料机构架设在输送机构的上方,用以将采收的萝卜导入输送机构内,包括夹持组件、安装组件、牵引组件和翻转组件,所述夹持组件滑动安装在安装组件的上方,所述牵引组件连接并驱动夹持组件,所述牵引组件还连接并驱动有与夹持组件配合的翻转组件,所述翻转组件用以将夹持组件夹持的萝卜翻转;
6.所述夹持组件包括安装板和两个对称铰接在安装板一端的夹持板,所述安装板的另一端设有驱动电机一,所述驱动电机一连接并驱动有与安装板滑动连接的驱动座,所述驱动座与夹持板通过连杆铰接,所述夹持板背离安装板的一端向下竖直连接有支杆,两个所述支杆相邻的一侧均转动连接有夹板。
7.优选的,所述安装组件包括两个对称分布在安装板两侧的导轨,所述导轨与安装板滑动连接,两个所述导轨的两端连接有第一安装架。
8.优选的,所述牵引组件包括驱动电机二和用以支撑驱动电机二的第二安装架,所述驱动电机二连接并驱动有与第二安装架滑动连接的齿条杆,所述齿条杆背离第二安装架的一端连接有与安装板活动连接的滑板。
9.优选的,所述翻转组件包括连接滑板并与安装板发生相对位移的支座以及多个啮合在支杆侧壁并驱动夹板转动的传动轮,所述支座贯穿安装板的一端设有连接杆,所述连接杆的两端均铰接有滑动安装在夹持板顶面的传动杆,所述传动杆背离连接杆的一端与支杆顶端的传动轮铰接。
10.优选的,所述安装板的端面开设有与支座配合的限位槽。
11.优选的,所述传动杆贯穿有导向块,所述导向块安装在夹持板的顶面。
12.优选的,所述夹持组件还包括安装在安装板顶面的导向框,所述导向框与驱动电机一轴端配合,所述驱动座滑动安装于导向框内。
13.优选的,两个所述夹板相邻的一侧均设有防滑垫。
14.本实用新型至少具备以下有益效果:
15.1、本实用新型采用第一安装架配合导轨对夹持组件进行支撑,进而通过夹持组件内的驱动电机一带动驱动座推动连杆,通过连杆带动夹持板绕铰接点转动,进而通过支杆带动夹板对采收的萝卜进行夹持,同时由夹板通过柔软的防滑垫与萝卜接触,夹持更加稳定,有效地提高收获效率;
16.2、本实用新型采用与夹持组件相对移动的翻转组件,夹持组件夹持萝卜后,由于夹持组件的自重,牵引组件先牵引翻转组件,通过滑板带动支座沿限位槽滑移,并通过连接杆驱动传动杆与夹持板发生相对位移,从而通过传动杆驱动多个传动轮啮合转动,并通过带动夹板转动,使得萝卜翻转至平行输送机构的输送方向,而支座与限位槽的上行末端接触后,由牵引组件带动夹持组件和翻转组件沿安装组件同步滑移,进而将翻转后的萝卜向后输送,适用于多种输送机构的输送,使用范围更广。
附图说明
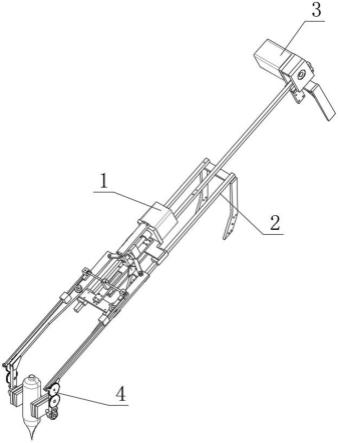
17.图1为本实用新型的立体结构示意图;
18.图2为本实用新型的爆炸示意图;
19.图3为本实用新型的使用示意图。
20.附图标记中:1、夹持组件;11、安装板;12、夹持板;13、支杆;14、夹板;15、防滑垫;16、导向框;17、驱动电机一;18、驱动座;19、连杆; 20、限位槽;2、安装组件;21、导轨;22、第一安装架;3、牵引组件;31、驱动电机二;32、第二安装架;33、齿条杆;34、滑板;4、翻转组件;41、支座;42、连接杆;43、传动杆;44、传动轮;45、导向块。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
22.实施例
23.请参阅图1-3,本实用新型提供一种技术方案:一种用于萝卜收获机器人的送料机构,该送料机构架设在输送机构的上方,用以将采收的萝卜导入输送机构内,包括夹持组件1、安装组件2、牵引组件3和翻转组件4,夹持组件1滑动安装在安装组件2的上方,牵引组件3连接并驱动夹持组件1,牵引组件3还连接并驱动有与夹持组件1配合的翻转组件4,翻转组件4用以将夹持组件1夹持的萝卜翻转,从而通过安装组件2进行架设安装,并通过夹持组件1对采收切叶后的萝卜进行夹持,同时由牵引组件3驱动夹持组件1和翻转组件4对萝卜进行夹持送料,并将竖直状态的萝卜翻转,便于萝卜的输送;
24.夹持组件1包括安装板11和两个对称铰接在安装板11一端的夹持板12,安装板11
的另一端设有驱动电机一17,驱动电机一17连接并驱动有与安装板11滑动连接的驱动座18,具体的,驱动电机一17的外伸轴蚀刻有外螺纹,驱动座18的中部蚀刻有内螺纹孔,驱动座18与夹持板12通过连杆19铰接,具体的,连杆19的两端分别与驱动座18和夹持板12铰接,夹持板12背离安装板11的一端向下竖直连接有支杆13,两个支杆13相邻的一侧均转动连接有夹板14,具体的,两个夹板14相背的一侧均设有与单自由度转动安装在支杆13底端的轴,即可通过驱动电机一17带动驱动座18推动连杆19,进而带动夹持板12绕铰接点转动,进而通过支杆13带动夹板14对采收的萝卜进行夹持,夹持更加稳定,有效地提高收获效率。
25.其中,安装组件2包括两个对称分布在安装板11两侧的导轨21,导轨 21与安装板11滑动连接,两个导轨21的两端连接有第一安装架22,即可通过第一安装架22沿输送机构架设,并通过导轨21对夹持组件1滑动支撑。
26.其中,牵引组件3包括驱动电机二31和用以支撑驱动电机二31的第二安装架32,具体的,第二安装架32架设在输送机构的输出端,驱动电机二 31连接并驱动有与第二安装架32滑动连接的齿条杆33,齿条杆33背离第二安装架32的一端连接有与安装板11活动连接的滑板34,即可通过驱动电机二31驱动齿条杆33带动滑板34驱动夹持组件1沿安装组件2滑动,进而对萝卜进行夹持送料。
27.其中,翻转组件4包括连接滑板34并与安装板11发生相对位移的支座 41以及多个啮合在支杆13侧壁并驱动夹板14转动的传动轮44,具体的,传动轮44的个数应为2的倍数,最下方的传动轮44与夹板14的转动轴连接,支座41贯穿安装板11的一端设有连接杆42,连接杆42的两端均铰接有滑动安装在夹持板12顶面的传动杆43,传动杆43背离连接杆42的一端与支杆 13顶端的传动轮44铰接,即可通过滑板34带动支座41通过支座41和连接杆42配合,带动传动杆43与夹持板12发生相对位移,从而通过传动杆43 驱动传动轮44带动夹持萝卜的夹板14翻转。
28.其中,安装板11的端面开设有与支座41配合的限位槽20,从而夹持组件1夹持萝卜后,由于夹持组件1的自重,牵引组件3先牵引翻转组件4,通过滑板34带动支座41沿限位槽20滑移,并通过连接杆42驱动传动杆43与夹持板12发生相对位移,从而通过传动杆43驱动多个传动轮44啮合转动,并通过带动夹板14转动,使得萝卜翻转至平行输送机构的输送方向,而支座 41与限位槽20的上行末端接触后,由牵引组件3带动夹持组件1和翻转组件 4沿安装组件2同步滑移,进而将翻转后的萝卜导入输送机构。
29.其中,传动杆43贯穿有导向块45,具体的,导向块45的中部开设有与传动杆43配合的通孔,导向块45安装在夹持板12的顶面,即可通过导向块 45对传动杆43进行导向。
30.其中,夹持组件1还包括安装在安装板11顶面的导向框16,导向框16 与驱动电机一17轴端配合,具体的,驱动电机一17的轴端贯穿导向框16,并与导向框16的两端转动连接,驱动座18滑动安装于导向框16内,具体的,驱动座18的顶端的平面和底端的平面分别与导向框16内顶面和安装板11顶面贴合,即可通过导向框16对驱动电机一17进行安装定位,并对驱动座18 进行导向并双向限位。
31.其中,两个夹板14相邻的一侧均设有防滑垫15,具体的,防滑垫15为柔软的橡胶垫或硅胶垫,即可通过防滑垫15防滑夹紧萝卜。
32.工作原理:
33.使用时,将该送料机构通过第一安装架22和第二安装架32架设在传输机构的上
方,收获机的采收机构将萝卜拔取并切叶后,将萝卜提升至两个夹板14之间,进而通过驱动电机一17带动驱动座18推动连杆19,进而带动夹持板12绕铰接点转动,进而通过支杆13带动夹板14和防滑垫15对采收的萝卜进行夹持,夹持更加稳定,有效地提高收获效率。
34.夹持组件1夹持萝卜后,由于夹持组件1的自重,牵引组件3先牵引翻转组件4,驱动电机二31驱动齿条杆33带动滑板34、支座41沿限位槽20 滑移,并通过连接杆42驱动传动杆43与夹持板12发生相对位移,从而通过传动杆43驱动多个传动轮44啮合转动,并通过带动夹板14转动,使得萝卜翻转至平行输送机构的输送方向,而支座41与限位槽20的上行末端接触后,由牵引组件3带动夹持组件1和翻转组件4沿安装组件2同步滑移,进而将翻转后的萝卜导入输送机构。
35.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
36.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。