一种基于uwb的保管箱定位系统及方法
技术领域
1.本技术涉及保管箱技术领域,具体涉及一种基于uwb的保管箱定位系统及方法。
背景技术:
2.保管箱是银行的传统业务,业务特点是在银行经营场所,以出租箱体的方式,代客户保管贵重物品。传统的机械式保管箱通常是1万-5万箱体组合在一起,每个箱体有2把钥匙,其中a钥匙由银行保管,b钥匙在客户租用箱体时配给客户使用。客户需要开箱时,需要银行人员先使用a钥匙打开主锁,再由客户用b钥匙打开b锁,才可以使用保管箱。客户使用完后,用b锁锁上箱体时,ab两个锁会同时锁上。
3.因安全原因,银行保管的a钥匙有1把,a钥匙可以打开所有的保管箱,但是b钥匙是一个保管箱有一个。
4.由于a锁的钥匙只有一个,因此,每次需要工作人员去客户需要打开的保管箱处来打开,效率低,而且浪费人力。
技术实现要素:
5.有鉴于此,本技术提供一种基于uwb的保管箱定位系统及方法,能够实现自动开锁,节省人力,提高效率和安全性。
6.本技术提供一种基于uwb的保管箱定位系统,包括:水平导轨、纵向导轨、智能模组和三个基站;
7.所述智能模组上设有uwb装置;所述三个基站位于同一个水平面且呈三角形布置;
8.所述智能模组装设于所述纵向导轨的纵向马达上,所述水平导轨和所述纵向导轨垂直设置;
9.所述uwb装置,用于发送带有时间戳的uwb信号,所述三个基站接收所述带有时间戳的uwb信号后,将时间戳加载到数据帧中,均返回给所述uwb装置;
10.所述智能模组,用于根据所述三个基站返回的数据帧来获得所述uwb装置与所述三个基站的距离,并且根据目标保管箱与所述三个基站的距离来控制水平马达和所述纵向马达移动,使所述uwb装置距离三个基站的距离与所述目标保管箱在所述同一个水平面距离所述三个基站的距离一致。
11.优选地,所述水平导轨包括以下两个互相平行的导轨:第一水平导轨和第二水平导轨;所述水平马达包括第一水平马达和第二水平马达;
12.所述纵向导轨的第一端通过所述第一水平马达连接所述第一水平导轨,所述纵向导轨的第二端通过所述第二水平马达连接所述第二水平导轨;
13.所述纵向导轨沿所述第一水平导轨和所述第二水平导轨水平移动。
14.优选地,所述三个基站分别为:第一基站、第二基站和第三基站;
15.所述第一基站和所述第二基站均位于所述第一水平导轨的外侧,所述第三基站位于所述第二水平导轨的外侧。
16.优选地,所述智能模组,具体用于根据当前所处位于与所述第一基站的距离控制所述水平马达和所述纵向马达使所述uwb装置移动,使所述uwb装置与所述第一基站的距离与所述目标保管箱与所述第一基站的距离一致;在保持所述uwb装置与所述第一基站的距离不变的前提下,控制所述水平马达和所述纵向马达使所述uwb装置移动,使所述uwb装置与所述第二基站的距离与所述目标保管箱与所述第二基站的距离一致;在保持所述uwb装置与所述第一基站的距离不变且所述uwb装置与所述第二基站的距离不变的前提下,控制所述水平马达和所述纵向马达使所述uwb装置移动,使所述uwb装置与所述第三基站的距离与所述目标保管箱与所述第三基站的距离一致。
17.优选地,所述智能模组,具体用于根据所述三个基站返回的数据帧中的时间戳和所述uwb信号的传输速度获得所述uwb装置与所述三个基站的距离。
18.本技术还提供一种基于uwb的保管箱定位,应用于定位系统,所述定位系统包括:水平导轨、纵向导轨、智能模组和三个基站;所述智能模组上设有uwb装置;所述三个基站位于同一个水平面且呈三角形布置;所述智能模组装设于所述纵向导轨的纵向马达上,所述水平导轨和所述纵向导轨垂直设置;
19.发送带有时间戳的uwb信号;
20.接收所述三个基站返回的带有所述时间戳的数据帧;
21.根据所述三个基站返回的数据帧来获得当前所处位置与三个基站的距离,并且根据目标保管箱与所述三个基站的距离来控制水平马达和所述纵向马达移动,使所述uwb装置距离三个基站的距离与所述目标保管箱在所述同一个水平面距离所述三个基站的距离一致。
22.优选地,所述水平导轨包括以下两个互相平行的导轨:第一水平导轨和第二水平导轨;所述水平马达包括第一水平马达和第二水平马达;
23.所述纵向导轨的第一端通过所述第一水平马达连接所述第一水平导轨,所述纵向导轨的第二端通过所述第二水平马达连接所述第二水平导轨;
24.所述纵向导轨沿所述第一水平导轨和所述第二水平导轨水平移动。
25.优选地,所述三个基站分别为:第一基站、第二基站和第三基站;
26.所述第一基站和所述第二基站均位于所述第一水平导轨的外侧,所述第三基站位于所述第二水平导轨的外侧。
27.优选地,所述根据所述三个基站返回的数据帧来获得当前所处位置与三个基站的距离,并且根据目标保管箱与所述三个基站的距离来控制水平马达和所述纵向马达移动,具体包括:
28.根据当前所处位于与所述第一基站的距离控制所述水平马达和所述纵向马达使所述uwb装置移动,使所述uwb装置与所述第一基站的距离与所述目标保管箱与所述第一基站的距离一致;在保持所述uwb装置与所述第一基站的距离不变的前提下,控制所述水平马达和所述纵向马达使所述uwb装置移动,使所述uwb装置与所述第二基站的距离与所述目标保管箱与所述第二基站的距离一致;在保持所述uwb装置与所述第一基站的距离不变且所述uwb装置与所述第二基站的距离不变的前提下,控制所述水平马达和所述纵向马达使所述uwb装置移动。
29.优选地,所述根据所述三个基站返回的数据帧来获得所述uwb装置与所述三个基
站的距离,具体包括:
30.具体用于根据所述三个基站返回的数据帧中的时间戳和所述uwb信号的传输速度获得所述uwb装置与所述三个基站的距离。
31.由此可见,本技术实施例具有如下有益效果:
32.本实施例提供的定位系统,通过设置uwb装置和多个基站,uwb装置可以向每个基站发送uwb信号,根据时间戳可以获得uwb装置距离每个基站的距离,进而根据距离可以定位目标保管箱的水平位置。uwb装置通过对比当前所处位置与三个基站的距离以及标准距离之间的差异,便可以引导uwb装置的移动方向。应该理解的是,uwb装置设置在纵向导轨,而且纵向导轨设置机械臂,机械臂可以自动打开保管箱。本技术实施例提供的技术方案,使用uwb技术进行保管箱的水平寻址和导航,三个基站接收的信号来判断机械臂与三个基站的距离,通过机械臂的uwb装置与基站的距离,来引导马达的工作状态,达到逐渐接近保管箱,并准确到达开锁位置的目的,从而机械臂实现自动开锁,不需要人工到达目标保管箱进行开锁,节省人力,提高效率和安全性。
附图说明
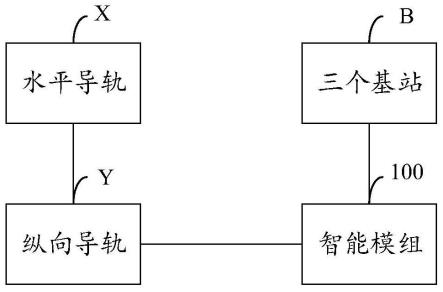
33.图1为本技术实施例提供的一种基于uwb的保管箱定位系统的示意图;
34.图2为本技术实施例提供的另一种基于uwb的保管箱定位系统的示意图;
35.图3为本技术实施例提供的又一种基于uwb的保管箱定位系统的示意图;
36.图4为本技术提供的一种基于uwb的保管箱定位方法的流程图。
具体实施方式
37.为了使本领域技术人员更好地理解本技术提供的技术方案,下面先介绍具体的应用场景。
38.本发明主要是在保留保管箱的机械锁的前提下,打开保管箱的a锁,但是由于保管箱一般包括很多台,例如一个保管区域可能上万甚至几万个保管箱,由银行管理岗人员来到待打开保管箱处,利用a钥匙打开保管箱,成本高,效率低,而且可能存在安全风险。
39.本技术实施例为了解决以上的技术问题,达到节省人力,提高开a锁的效率的目的,可以实现自动开锁,不需要工作人员到达待打开保管箱处。而且本技术提供的技术方案,在自动开锁时,首先要准确找到目标保管箱的位置。本技术提供的技术方案是基于超宽带(uwb,uwb,ultra wide band)来实现保管箱的定位。
40.应该理解,本技术对于目标保管箱的定位是指的水平位置的定位,并且均是对于保管箱最顶端的定位,例如吊装在天花板上,当然需要准确定位保管箱,在水平位置定位以后,还需要进行垂直方向的定位。例如保管箱在保管箱区域像书架一样排放,包括很多排,每排包括很多列,每列上可能垂直方向包括多个保管箱,例如10个保管箱。本技术仅介绍对于排方向的定位,不针对垂直方向进行定位。
41.系统实施例
42.为了使本领域技术人员更好地理解本技术实施例提供的技术方案,下面结合附图进行详细介绍。
43.参见图1,该图为本技术实施例提供的一种基于uwb的保管箱定位系统的示意图。
44.本技术实施例不具体限定基站的数量,一般基站的数量越多,定位越准确,为了精准定位,可以设置三个不位于同一条直线上的三个基站。
45.uwb装置可以发送带有时间戳的数据帧,当每个基站接收到数据帧时,通过比较基站的实时时间和数据帧的时间戳的时间,可以计算出uwb装置与基站之间的距离,因为时间乘以uwb信号在空中传播的速度便为距离。利用uwb进行定位的工作原理与gps类似。
46.因此,对于保管箱的水平定位,只要在保管箱所位于的区域的顶部设置多个基站,利用uwb装置进行收发信号,就能够准确的定位,uwb装置在三维空间的准确位置。
47.本发明主要是利用uwb装置可以发送数据的方式,在保管箱区域安装3个接收数据的基站,在开锁机械臂上安装uwb装置,通过uwb装置与基站的数据传输距离,不断调整机械臂以达到将钥匙送到保管箱钥匙孔的目的。
48.本实施例提供的基于uwb的保管箱定位系统,包括:水平导轨x、纵向导轨y、智能模组100和三个基站b;
49.智能模组100上设有uwb装置;三个基站b位于同一个水平面且呈三角形布置;也可以设置更多的基站,例如4个或5个。
50.智能模组100装设于纵向导轨y的纵向马达上,水平导轨x和纵向导轨y垂直设置;
51.uwb装置,用于发送带有时间戳的uwb信号,三个基站接收带有时间戳的uwb信号后,将时间戳加载到数据帧中,均返回给uwb装置;
52.智能模组100,用于根据三个基站b返回的数据帧来获得uwb装置与三个基站b的距离,并且根据目标保管箱与三个基站b的距离来控制水平马达和纵向马达移动,使uwb装置距离三个基站b的距离与目标保管箱在同一个水平面距离三个基站b的距离一致。
53.具体地,智能模组,具体用于根据三个基站返回的数据帧中的时间戳和uwb信号的传输速度获得uwb装置与三个基站的距离。
54.一种可能的实现方式,每个基站与智能模组之间通过wifi进行数据通讯。
55.本实施例提供的定位系统,通过设置uwb装置和多个基站,可以定位目标保管箱的水平位置。一般保管箱系统在设置初期,已经将保管箱的位置和编号录入系统,当客户需要打开保管箱时,输入保管箱的编号,系统会将保管箱的位置或编号发送给uwb装置,而且,由于三个基站的位置已知,目标保管箱的位置已知,因此,目标保管箱距离三个基站的标准距离也已知。因此,uwb装置通过对比当前所处位置与三个基站的距离以及标准距离之间的差异,便可以引导uwb装置的移动方向。应该理解的是,uwb装置设置在纵向导轨,而且纵向导轨设置机械臂,机械臂可以自动打开保管箱。本技术实施例提供的技术方案,使用uwb技术进行保管箱的水平寻址和导航,三个基站接收的信号来判断机械臂与三个基站的距离,通过机械臂的uwb装置与基站的距离,来引导马达的工作状态,达到逐渐接近保管箱,并准确到达开锁位置的目的。
56.参见图2,该图为本技术实施例提供的另一种基于uwb的保管箱定位系统的示意图。
57.为了定位更加精准,本技术实施例以三个基站为例,三个基站分别为:第一基站a、第二基站b和第三基站c;
58.第一基站a和第二基站b均位于第一水平导轨x1的外侧,第三基站c位于第二水平导轨x2的外侧。
59.图2中的保管箱区域1000包括很多排的保管箱,即图2中的长方形所示为一排,每排保管箱可以包括多列,每列的垂直方向可以包括多个保管箱。
60.例如为了增加系统的稳定性,水平导轨包括以下两个互相平行的导轨:第一水平导轨x1和第二水平导轨x2;水平马达包括第一水平马达ma和第二水平马达mb;
61.纵向导轨y的第一端通过第一水平马达ma连接第一水平导轨x1,纵向导轨y的第二端通过第二水平马达mb连接第二水平导轨x2;
62.纵向导轨y沿第一水平导轨x1和第二水平导轨x2水平移动。
63.本技术实施例不具体限定uwb装置的初始位置,例如uwb装置的初始位置可以位于纵向导轨y的中间位置,即纵向马达的初始位置也位于纵向导轨y的中间位置。另外,对于第一水平马达ma和第二水平马达mb的初始位置可以均位于水平导轨的最左侧或最右侧。
64.第一基站a与uwb装置的距离为测距a,第二基站b与uwb装置的距离为测距b,第三基站c与uwb装置的距离为测距c。
65.目标保管箱t对应的水平位置为图中黑色正方形的位置。即纵向马达需要移动至目标保管箱t的位置。
66.下面结合附图3详细介绍本技术实施例提供的定位系统的工作原理。
67.参见图3,该图为本技术实施例提供的又一种基于uwb的保管箱定位系统的示意图。
68.由于本技术实施例以三个基站为例,因此,可以依次对准每个基站与目标保管箱t的距离,首先将uwb装置与第一基站a的距离调整为目标保管箱与第一基站a的距离,然后依次调整第二基站b的距离和第三基站c的距离。应该理解,当uwb装置与第一基站a的距离调整好以后,再调整与第二基站b的距离时,为了保证uwb装置与第一基站a的距离不变,可以以第一基站a为圆心,以目标保管箱与第一基站a的距离为半径,在该圆周上控制uwb装置移动,从而找到uwb装置距离第二基站b的距离等于目标保管箱与第二基站b的距离。以此类推,找到uwb装置与第三基站c的距离。
69.本技术实施例提供的定位系统,智能模组,具体用于根据当前所处位于与第一基站a的距离控制水平马达和纵向马达使uwb装置移动,使uwb装置与第一基站的距离与目标保管箱与第一基站的距离一致;在保持uwb装置与第一基站a的距离不变的前提下,控制水平马达和纵向马达使uwb装置移动,使uwb装置与第二基站b的距离与目标保管箱与第二基站的距离一致;在保持uwb装置与第一基站a的距离不变且uwb装置与第二基站b的距离不变的前提下,控制水平马达和纵向马达使uwb装置移动,使uwb装置与第三基站的距离与目标保管箱与第三基站c的距离一致。
70.首先调整第一水平马达ma、第二水平马达ma和纵向马达,先调整测距a的数据,满足目标保管箱t与第一基站a的距离。此时根据数学原理,在保管箱区域1000是以基站a为原点,在保管箱区域1000的水平面的圆周轨迹来寻址uwb装置需要移动到的位置。
71.其次,控制第一水平马达ma、第二水平马达ma和纵向马达,在上一步的圆周轨迹上运动,寻找到满足测距b距离的点,根据数学原理,此时有可能有两个点能同时满足测距a、测距b的距离要求。
72.最后在上一步获得的两个点进行分别判断,最终找到满足测距c的实际点位,即完成保管箱水平位置的定位。
73.以上仅是以先找到合适的测距a,再找到合适的测距b,最后找到合适的测距c,实际中,可以不按照以上的顺序,例如,先找到合适的测距b,再找到测距c,最终找到合适的测距b。
74.方法实施例
75.基于以上实施例提供的一种基于uwb的保管箱定位系统,本技术实施例还提供一种基于uwb的保管箱定位方法,下面结合附图进行详细介绍。
76.参见图4,该图为本技术实施例提供的一种基于uwb的保管箱定位方法的流程图。
77.本实施例提供的基于uwb的保管箱定位方法,应用于定位系统,定位系统包括:水平导轨、纵向导轨、智能模组和三个基站;智能模组上设有uwb装置;三个基站位于同一个水平面且呈三角形布置;智能模组装设于纵向导轨的纵向马达上,水平导轨和纵向导轨垂直设置;
78.s401:发送带有时间戳的uwb信号;
79.s402:接收三个基站返回的带有时间戳的数据帧;
80.s403:根据三个基站返回的数据帧来获得当前所处位置与三个基站的距离,并且根据目标保管箱与三个基站的距离来控制水平马达和纵向马达移动,使uwb装置距离三个基站的距离与目标保管箱在同一个水平面距离三个基站的距离一致。
81.水平导轨包括以下两个互相平行的导轨:第一水平导轨和第二水平导轨;水平马达包括第一水平马达和第二水平马达;
82.纵向导轨的第一端通过第一水平马达连接第一水平导轨,纵向导轨的第二端通过第二水平马达连接第二水平导轨;
83.纵向导轨沿第一水平导轨和第二水平导轨水平移动。
84.三个基站分别为:第一基站、第二基站和第三基站;
85.第一基站和第二基站均位于第一水平导轨的外侧,第三基站位于第二水平导轨的外侧。
86.根据三个基站返回的数据帧来获得当前所处位置与三个基站的距离,并且根据目标保管箱与三个基站的距离来控制水平马达和纵向马达移动,具体包括:
87.根据当前所处位于与第一基站的距离控制水平马达和纵向马达使uwb装置移动,使uwb装置与第一基站的距离与目标保管箱与第一基站的距离一致;在保持uwb装置与第一基站的距离不变的前提下,控制水平马达和纵向马达使uwb装置移动,使uwb装置与第二基站的距离与目标保管箱与第二基站的距离一致;在保持uwb装置与第一基站的距离不变且uwb装置与第二基站的距离不变的前提下,控制水平马达和纵向马达使uwb装置移动。
88.根据三个基站返回的数据帧来获得uwb装置与三个基站的距离,具体包括:
89.具体用于根据三个基站返回的数据帧中的时间戳和uwb信号的传输速度获得uwb装置与三个基站的距离。
90.本实施例提供的定位方法,通过设置uwb装置和多个基站,uwb装置可以向每个基站发送uwb信号,根据时间戳可以获得uwb装置距离每个基站的距离,进而根据距离可以定位目标保管箱的水平位置。uwb装置通过对比当前所处位置与三个基站的距离以及标准距离之间的差异,便可以引导uwb装置的移动方向。应该理解的是,uwb装置设置在纵向导轨,而且纵向导轨设置机械臂,机械臂可以自动打开保管箱。本技术实施例提供的技术方案,使
用uwb技术进行保管箱的水平寻址和导航,三个基站接收的信号来判断机械臂与三个基站的距离,通过机械臂的uwb装置与基站的距离,来引导马达的工作状态,达到逐渐接近保管箱,并准确到达开锁位置的目的。
91.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本技术。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本技术的精神或范围的情况下,在其它实施例中实现。因此,本技术将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。