1.本实用新型涉及车载终端技术领域,具体涉及一种北斗定位车载终端。
背景技术:
2.自由流收费是利用卫星定位技术进行公路收费的业务模式,即要求车辆安装gps等定位终端,在收费公路上不减速自由通行,通过车载gps定位终端上报的位置信息,判断车辆的实际行驶轨迹,以此作为收费依据来实现不停车精准收费。加之当前我国自主研发的北斗卫星定位技术快速发展,因其技术越发成熟、信息保密性能较高等优点,在国内民用方面的车载定位技术中得到越来越广泛的应用,因此我国正在积极开展基于北斗定位的自由流收费研究,而开发一款基于此应用的新型北斗定位车载终端是其中一个关键步骤。
3.另外,目前的车载定位终端只有在车辆正常启动条件下,由车载电源进行供电维持车载定位终端的运行,在车载电源无法正常供电时终端就会断电关机,不能再继续定位车辆位置;有的车载终端带有备用电池可以进行辅助供电,但由于车载定位终端含有多个模块和元器件,均需要依靠备用电池提供的电能维持运转,导致备用电池耗电过快,续航时间短,不足以支撑车辆长时间的持续定位,也成为一个需要解决的问题。
技术实现要素:
4.本实用新型的目的在于提供一种北斗定位车载终端,通过高精度的北斗定位技术,实现对各级道路上的通行车辆的精准计费,还能有效延长备用软包电池的续航时间。
5.本实用新型的技术方案为:
6.一种北斗定位车载终端,包括内部固定有电路板的壳体;所述电路板上设有北斗定位芯片、六轴传感器、中央处理模块、电源模块;所述中央处理模块分别与所述北斗定位芯片、六轴传感器电连接,所述北斗定位芯片连接有置于所述车载终端内部的北斗定位天线;所述电源模块为所述中央处理模块、北斗定位芯片、六轴传感器供电;所述六轴传感器包括三轴加速度传感器和陀螺仪。
7.优选的,所述北斗定位芯片为型号为td1030的高精度定位芯片。
8.优选的,所述电源模块包括连接于所述电路板上的外接电源线,以及备用软包电池;所述外接电源线用以连接车载电源,为所述车载终端供电,当所述车载电源不供电时,由所述备用软包电池进行供电。
9.优选的,所述中央处理模块为mcu,内置有256kb flash和128kb sram,工作频率为120mhz。
10.与现有技术相比,本实用新型达到的有益效果如下:
11.本实用新型通过采用高精度的北斗定位芯片,可以实现对车辆在各级道路上行驶时的精确定位,将该位置信息数据进行分析处理后,发送给超算平台进行车辆行驶轨迹的判断,以准确计量车辆通行费,使本实用新型能够应用于公路自由流收费业务。另外,通过采用六轴传感器,可以自动判断车辆的启停状态。尤其在备用软包电池供电情况下可以根
据判断结果决定是否持续供电,有效节约了备用软包电池的电量,极大地延长了其续航时间,可以支持车辆长时间的定位需求。
附图说明
12.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的优选实施例,并不对本实用新型的范围进行限制。附图不按比例(除规定外),并且旨在结合下面详细描述中的说明来使用。
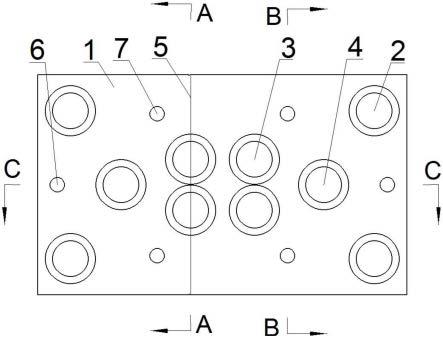
13.图1为本实用新型电路板的俯视示意图;
14.图中:电路板1、北斗定位芯片2、外接电源线3、备用软包电池4、六轴传感器5、中央处理模块6。
具体实施方式
15.为了更好理解本实用新型技术内容,下面将结合本实用新型中的附图,提供具体实施例,并结合附图对本实用新型做进一步的说明。
16.一种北斗定位车载终端,包括内部固定有电路板1的壳体;电路板1上设有北斗定位芯片2、六轴传感器5、中央处理模块、电源模块;中央处理模块分别与北斗定位芯片2、六轴传感器5电连接,北斗定位芯片2连接有置于车载终端内部的北斗定位天线;电源模块为中央处理模块、北斗定位芯片2、六轴传感器5供电;六轴传感器5包括三轴加速度传感器和陀螺仪。
17.优选的,北斗定位芯片2为型号为td1030的高精度定位芯片。通过使用该型号的高精度定位芯片,结合北斗地基增强基准站进行纠偏,能达到厘米级定位精度,实现车道级定位,能更好的区分出高速公路、国省县道、旅游公路等不同道路功能与等级的道路,以及复杂的立交转弯情况,实现精确计量通行车辆的道路通行费。
18.优选的,电源模块包括连接于电路板1上的外接电源线3,以及备用软包电池4;外接电源线3用以连接车载电源,为车载终端供电,当车载电源不供电时,由备用软包电池4进行供电。
19.中央处理模块6可以通过对外部电压、acc电压、备用软包电池4电压的检测得知车载终端的供电状况,执行相应的供电方式。当外部电压和acc电压检测正常时,此时由车载电源对车载终端进行供电,电压会经过dcdc电路降压至4.2v;另外dcdc电路连接有充电电路,在车载电源供电的同时可以通过充电电路给备用软包电池4充电。当检测不到acc电压时,此时车载电源未能进行供电,中央处理模块6则会给备用软包电池4发出执行指令,备用软包电池4开始对车载终端供电;在供电期间会进行电压监控,当电池电压低于3.7v时,中央处理模块6会停止备用软包电池4供电,车载终端进入关机模式。
20.优选的,中央处理模块6为mcu,内置有256kb flash和128kb sram,工作频率为120mhz。
21.本实用新型的六轴传感器5用于判断车辆的启停状态,若为行驶状态,则电源模块继续为车载终端供电;若为停止状态,则中央处理模块6将控制车载终端进入休眠模式,以减少电源模块的供电。
22.一种北斗定位车载终端判断车辆启停状态的方法:
23.车载终端平行安装于车辆的前挡风玻璃,安装好后,六轴传感器5即与车辆固定,此时三轴加速度传感器和陀螺仪的三维空间坐标将能代表车辆的运动状态,二者分别在三个方向上的数据就是车辆的三个方向的活动数据;具体的:
24.(1)采用三轴加速度传感器计算目标车辆的行进方向与行进速度;其三轴分别为:车辆正前方为x轴正向,车辆左侧为y轴正向,车辆垂直地面向上为z轴正向;通过三轴加速度传感器测量得到的三个方向上的加速度,可以得到各个方向关于时间t的加速度a的函数;同时,加速度a又是速度的导数,即a=dv/dt,因此可以得到各个方向关于速度v的函数v=g(t)=∫a dt,以此算出各方向上的速度;再根据公式|v|=sqrt[(v
x
)2 (vy)2 (vz)2],即可计算出车辆的行进方向与行进速度;
[0025]
(2)采用陀螺仪计算目标车辆的角度位置;陀螺仪测量的是上述三个互相垂直坐标轴的转向角速度;其中,俯仰角围绕x轴旋转,偏航角围绕y轴旋转,翻滚角围绕z轴旋转;通过陀螺仪测量得到的三个方向的转向角速度,经过对时间t的积分计算可得出各方向上的转角位置φ=∫ωdt,再根据公式|φ|=sqrt[(φ
x
)2 (φy)2 (φz)2],即可计算出车辆的角度位置;
[0026]
无论在户外或室内,当计算v或φ不等于0时,表明车辆处于行驶状态;当计算v、φ同时等于0,并且在连续十五分钟内数值保持不变,可判断车辆处于停止状态。尤其在车载电源不供电、备用软包电池4为车载终端供电情况下,通过判断启停状态来决定备用软包电池4是否持续为车载终端供电,可以节约备用软包电池4的电量。
[0027]
三轴加速度传感器和陀螺仪均可以在公开市场上进行购买。在本实用新型中,三轴加速度传感器的数据刷新率范围为12.5-1600hz,陀螺仪为25-6400hz,中央处理模块6通过i2c接口与六轴传感器5电连接,分别对三轴加速度传感器和陀螺仪进行数据刷新率的设置,使二者通过特定的刷新率输出原始数据,再由中央处理模块6将获取的原始数据进行计算分析。
[0028]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型保护的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。