1.本发明涉及无人驾驶技术领域,尤其是涉及一种远程遥控装置工作台。
背景技术:
2.挖掘机在实际应用中经常要按一定的操作路径控制铲斗的运行轨迹,此时操作者需要控制动臂、斗杆、铲斗及回转,使铲斗的运行轨迹不要与周边环境发生干涉或碰撞。对某一挖掘区域进行重复挖掘动作时,操作者手脑并用耗费大量精力,长时间作业容易造成疲劳。
3.现有的可参考公告号为cn201520875534.9的中国专利,其公开了一种远程控制装置包括处理器、第一远程无线收发模块、显示器、左侧操作手柄以及右侧操作手柄,工作人员通过左侧操作手柄和右侧操作手柄对挖掘机进行角度旋转,通过脚踏机构控制挖掘机进行移动,并借助操控面板控制挖掘机钩爪挖掘,同时工作人员借助显示器实时观测挖掘机现场作为界面情况。
4.不过无人挖掘机在执行每一个动作过程中需要一定的时间,长时间的远程操控,将消耗远程操控人员较多的精力,可能出现操作失误的情况发生。
技术实现要素:
5.为了提高操作便捷性,本技术提供一种远程遥控装置工作台。
6.一种远程遥控装置工作台,包括左侧操作手柄、右侧操作手柄、脚踏机构、操控面板、显示器和处理器,所述远程遥控装置工作台还包括:启动按键以及存储器;
7.启动按键,所述左侧操作手柄的端部上开设有第一安装槽,所述启动按键安设在安装槽内,用于接收操作者输入的启动指令;
8.存储器,连接于启动按键,用于接收启动指令并将预设控制指令传输至处理器。
9.通过采用上述技术方案,工作人员抓取左侧操作手柄,并按压启动按键,启动按键接收工作人员启动指令后,将启动指令发送至存储器,存储器响应启动指令并输出预设控制指令至处理器,处理器响应预设控制指令并输出相应信号至无人挖掘机,从而控制无人挖掘机运行。
10.可选的,处理器包括:操作处理器以及预设程序处理器;
11.操作处理器,与存储器连接,用于接收预设控制指令并输出控制指令以及切换信号;
12.预设程序处理器,与操作处理器连接,用于接收操作处理器发送的切换信号并输出控制指令以及开关控制信号;
13.操作处理器输出端连接有第一开关,用于响应控制信号并开启;所述设程序处理器输出端连接有第二开关,用于响应控制信号并关闭。
14.通过采用上述技术方案,操作处理器接收存储器发送的预设控制指令后,操作处理器响应预设控制指令并输出控制指令至无人挖掘机并控制无人挖掘机开始运行;在无人
挖掘机接收到控制指令的同时,操作处理器发送切换信号至预设程序处理器,第一开关响应切换信号断开,致使操作处理器与无人挖局机之间的信息传输通道中断;此时第二开关响应切换信号闭合,预设程序处理器与无人挖掘机之间的信息传输通道导通,预设程序处理器响应切换信号并发送控制指令,继续控制无人挖掘机执行当前动作。
15.可选的预设程序处理器连接有开关控制模块;开关控制模块包括:第一开关、第二开关、三极管q1、比较器t1、电磁继电器km1。
16.比较器t1正反馈输入端与预设程序处理器连接,比较器t1负反馈输入端接地,比较器t1输出端与三极管q1基极连接;三极管q1集电极与电磁继电器km1一端连接,三极管q1发射极接地;电磁继电器km1另一端与电源vcc连接,第一开关一端与预设程序处理器以连接,第一开关另一端与发射机以及第二开关一端连接,第二开关的另一端与操作处理器连接。
17.通过采用上述技术方案,预设程序处理器输出开关控制信号至比较器t1正反馈输入端,通过比较器ti输出端输出高电平信号至三极管q1基极,使三极管q1导通,此时电磁继电器km1得电,并开始吸附第一开关断开以及第二开关闭合,致使操作处理器与发射器传输通道中断,发射器停止接收操作处理器发送的控制指令;同时,预设程序处理器与发射器之间的信息传输通道导通,预设程序处理器发送的控制指令被发射器接收,并控制无人挖掘机继续执行当前动作。
18.可选的,右侧操作手柄的端部开设有第二安装槽,在所述第二安装槽内设置有急停按键,所述急停按键与存储器连接,用于接收操作者输入的急停指令;
19.所述处理器的信号输出端连接有发射器,用于接收控制指令并发送至无人挖掘机;
20.所述发射器与操作处理器之间连接有第三开关,所述第三开关响应与急停指令断开;
21.所述操作处理器连接有急停控制模块,用于控制第三开关启闭。
22.通过采用上述技术方案,若施工现场出现紧急情况,需控制无人挖掘机紧急停止所有运行动作,工作人员按压急停按键,急停按键急停指令发送至存储器,存储器响应急停指令并输出预设控制指令至操作处理器,操作处理器控制第三开关断开,中断处理器与发射器之间的信息传输,从而控制无人挖掘机在当前状态下停止运行。
23.可选的,急停控制模块包括:第三开关、三极管q2、比较器t2以及电磁继电器km2;
24.比较器t2正反馈输入端与操作处理器连接,比较器t2负反馈输入端接地,比较器t2输出端与三极管q2基极连接,三极管q2集电极与电磁继电器km2一端连接,三极管q2的发射极接地,第三开关一端与操作处理器连接,第三开关另一端与发射器连接。
25.通过采用上述技术方案,工作人员按压急停按键,急停按键在接收工作人员急停指令后,并将急停指令发送至存储器,存储器响应急停指令并输出预设控制指令至处理器,操作处理器输出控制信号至比较器t2的正反馈输入端,并通过比较器t1的输出端输出高电平信号至三极管q2基极,使三极管q2集电极和发射结导通,同时电磁继电器km2得电,并开始吸附第三开关断开,发射器与操作处理器以及预设程序处理器之间的信息传输通道断开,无人挖掘机在无法获得控制指令情况下,在所处当前状态下停止运行。
26.可选的,远程遥控装置工作台还包括外接usb传输口;usb传输口,用于外接移动终
端,对处理器内部程序进行维护和升级。
27.通过采用上述技术方案,工作人员可以通过usb传输口外接具有usb端口的移动终端,对处理器内部预设程序进行定期维护和升级。
28.可选的,左侧操作手柄下方设置有肘扶托杆。
29.通过采用上述技术方案,工作人员需长时间进行远程超控无人挖掘机作业时,手臂将会出现酸痛感,借助肘扶托杆可以减缓工作人员手臂的酸痛。
30.综上所述,本技术包括以下至少一种有益技术效果:
31.1. 具有操作处理器接收存储器发送的预设控制指令后,操作处理器响应预设控制指令并输出控制指令至无人挖掘机并控制无人挖掘机开始运行;同时操作处理器发送切换信号至预设程序处理器,第一开关响应切换信号断开,致使操作处理器与无人挖局机之间的信息传输通道中断;此时第二开关响应切换信号闭合,预设程序处理器与无人挖掘机之间的信息传输通道导通,预设程序处理器响应切换信号并发送控制指令,继续控制无人挖掘机执行当前动作的效果。
32.2. 具有在需要无人挖掘机紧急停止时,工作人员按压急停按键,急停按键急停指令发送至存储器,存储器响应急停指令并输出预设控制指令至操作处理器,操作处理器控制第三开关断开,中断处理器与发射器之间的信息传输,控制无人挖掘机在当前状态下停止运行的效果。
附图说明
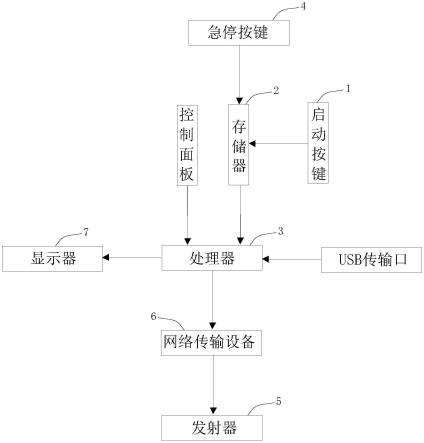
33.图1是本技术远程遥控装置工作台连接图;
34.图2是本技术处理器连接图;
35.图3是本技术开关控制模块连接图;
36.图4是本技术急停控制模块连接图;
37.图5是本技术网络传输设备连接图;
38.图6是本技术远程装置工作台示意图。
39.附图标记说明:1、启动按键;2、存储器;3、处理器;31、操作处理器;32、预设程序处理器;33、第一开关;34、第二开关;35、第三开关;4、急停按键;5、发射器;6、网络传输设备;61、交换机;62、防火墙;7、显示器;8、开关控制模块;9、急停控制模块;101、肘扶托杆。
具体实施方式
40.以下结合附图1-3对本技术做进一步详细说明。
41.本技术实施例公开一种远程遥控装置工作台。参照图1,一种远程遥控装置工作台,包括左侧操作手柄、右侧操作手柄、脚踏机构、操控面板、显示器7和处理器;所述远程遥控装置工作台还包括:启动按键1、存储器2、急停按键4、发射器5以及网络传输设备6;
42.启动按键1,所述左侧操作手柄的端部上开设有第一安装槽,所述启动按键1安设在安装槽内,用于接收操作者输入的启动指令;
43.存储器2,连接于启动按键1,用于接收启动指令并将预设控制指令传输至处理器;
44.处理器,与存储器2连接,用于接收预设控制指令并输出控制指令;
45.所述处理器连接有发射器5,用于接收控制指令并发送至无人挖掘机;
46.所述右侧操作手柄的端部开设有第二安装槽,在所述第二安装槽内设置有急停按键4;所述急停按键4与存储器2连接,用于接收操作者输入的急停指令;
47.网络传输设备6,与显示器7连接,用于远程遥控装置工作台与无人挖掘机之间进行图像信息以及控制指令的传输;
48.所述发射器5与处理器之间连接有第三开关35,所述第三开关35响应与急停指令断开。
49.工作人员抓取左侧操作手柄,并按压位于手柄端部第一安装槽内的启动按键1时,启动按键1接收工作人员启动指令后,并将启动指令发送至存储器2,存储器2响应启动指令并输出预设控制指令至处理器,处理器输出控制指令并通过发射器5将控制指令发送至无人挖掘机,无人挖掘机响应控制指令并工作,执行预设的重复动作。
50.重复动作执行结束后,工作人员实时操控左侧操作手柄、右侧操作手柄、脚踏机构以及操控面板上的控制按键,向存储器2发送运行指令,处理器接收运行指令并将运行指令发送至发射器5,通过发射器5将运行指令发送至无人挖掘机,无人挖掘机响应运行指令并开始实时控制作业。
51.同时无人挖掘机中的摄像机拍摄的施工作业界面的环境画面借助网络传输设备6传输至与显示器7进行显示,工作人员可以通过显示器7来对无人挖掘机现场施工情况进行实时观测。
52.工作人员在远程控制无人机挖掘机施工作业过程中,在通过显示器7接收到的施工作业界面的环境画面中发现突发情况,例如:施工作业范围内有人员出入,需控制无人挖掘机紧急停止所有运行动作时,工作人员按压位于右侧手柄端部第二安装槽内的急停按键4,急停按键4在接收工作人员急停指令后,并将急停指令发送至存储器2,存储器2响应急停指令并输出预设控制指令至处理器,处理器输出控制信号并控制第三开关35断开,中断处理器与发射器5之间的信息传输,从而控制无人挖掘机在当前状态下停止运行。
53.所述远程遥控装置工作台还包括外接usb传输口,工作人员可以通过usb传输口外接具有usb端口的移动终端,用于对处理器内部预设程序进行定期维护和升级,确保处理器内部预设程序运行正常。
54.所述右侧操作手柄以及左侧操作手柄下方都设置有肘扶托杆101,工作人员操控操作手柄时手肘部位呈悬空姿态,当需长时间进行远程超控无人挖掘机作业时,工作人员手臂将会出现酸痛感,借助肘扶托杆101可以减缓工作人员手臂的酸痛。
55.作为处理器的一种实施方式,参照图2,处理器包括:操作处理器31以及预设程序处理器32;
56.操作处理器31,与存储器2连接,用于接收启动指令并输出控制指令以及切换信号;
57.预设程序处理器32,与操作处理器31连接,用于接收操作处理器31发送的切换信号。
58.所述操作处理器31输出端还连接有第一开关33,用于响应切换信号并开启;所述预设程序处理器32输出端还连接有第二开关34,用于响应切换信号并关闭;所述第一开关33为常闭开关,第二开关34为常开开关。
59.当工作人员按压启动按键1,操作处理器31与预设程序处理器32开始运行;操作处
理器31接收存储器2发送的预设控制指令,操作处理器31响应预设控制指令并输出控制指令至发射器5,发射器5将控制指令发送至无人挖掘机并控制无人挖掘机开始运行;在无人挖掘机接收到控制指令的同时,操作处理器31发送切换信号至预设程序处理器32,第一开关33响应切换信号断开,致使操作处理器31与发射器5之间的信息传输通道中断;此时第二开关34响应切换信号闭合,预设程序处理器32与发射器5之间的信息传输通道导通,预设程序处理器32响应切换信号并发送控制指令至发射器5,通过发射器5继续控制无人挖掘机执行当前动作。
60.参照图3,预设程序处理器32还连接有开关控制模块8,预设程序处理器32包括:第一开关33、第二开关34、三极管q1、比较器t1以及电磁继电器km1;
61.比较器t1正反馈输入端与预设程序处理器32连接,比较器t1负反馈输入端接地,比较器t1输出端与三极管q1基极连接;三极管q1集电极与电磁继电器km1一端连接,三极管q1发射极接地;电磁继电器km1另一端与电源vcc连接,第一开关33一端与预设程序处理器32以连接,第一开关33另一端与发射机以及第二开关34一端连接,第二开关34的另一端与操作处理器31连接。
62.预设程序处理器32接收操作处理器31发送的切换信号后,预设程序处理器32发出控制指令,同时预设程序处理器32输出开关控制信号至比较器t1正反馈输入端,通过比较器ti输出端输出高电平信号至三极管q1基极,使三极管q1集电极和发射极之间导通,此时电磁继电器km1得电,并开始吸附第一开关33断开以及第二开关34闭合,致使操作处理器31与发射器5传输通道中断,发射器5停止接收操作处理器31发送的控制指令;同时,预设程序处理器32与发射器5之间的信息传输通道导通,预设程序处理器32发送的控制指令被发射器5接收,并控制无人挖掘机继续执行当前动作。
63.作为急停控制模块9的一种实施方式,参照图4,急停控制模块9包括:第三开关35、三极管q2、比较器t2以及电磁继电器km2;
64.比较器t2正反馈输入端与操作处理器31连接,比较器t2负反馈输入端接地,比较器t2输出端与三极管q2基极连接,三极管q2集电极与电磁继电器km2一端连接,三极管q2的发射极接地,第三开关35一端与操作处理器31连接,第三开关35另一端与发射器5连接。
65.工作人员按压位于右侧手柄端部第一安装槽内的急停按键4,急停按键4在接收工作人员急停指令后,并将急停指令发送至存储器2,存储器2响应急停指令并输出预设控制指令至处理器,操作处理器31输出控制信号至比较器t2的正反馈输入端,并通过比较器t1的输出端输出高电平信号至三极管q2基极,使三极管q2集电极和发射结导通,同时电磁继电器km2得电,并开始吸附第三开关35断开,发射器5与操作处理器31以及预设程序处理器32之间的信息传输通道断开,从而使操作处理器31和预设程序处理器32发送控制指令无法被发射器5所接收,无人挖掘机在无法获得控制指令情况下,在所处当前状态下停止运行,实现对无人挖掘机在突发情况下紧急停止的目的。
66.作为网络传输设备6的一种实施方式,参照图5,网络传输设备6包括:交换机61以及防火墙62;
67.防火墙62,用于无限发射器5与交换机61之间进行收发信息时,识别与本次传输的施工界面环境信息不相干的数据信息,同时对恶意文件进行检测和阻断,并进行记录生成日志;
68.交换机61,与防火墙62连接,用于将从防火墙62接收到的无人挖掘机中的摄像机拍摄的施工界面环境信息转发至处理器。
69.无限发射器5通过无线网络接收到无人挖掘机中的摄像机拍摄的施工界面环境信息后以有线网络的形式传输至防火墙62,通过防火墙62对接收到的施工界面环境信息进行检测,并识别与本次传输的信息不相干的数据信息,同时对恶意文件进行检测和阻断,并对本次数据传输过程进行记录生成日志文件,之后防火墙62将施工界面环境信息输出至交换机61,通过交换机61的转换发送至处理器,通过人员通过与处理器连接的显示器7来对无人挖掘机的施工界面环境进行观测。
70.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。