在多处理器控制器中用于命令或非命令信道切换的系统和方法
1.优先权要求/通过引用结合
2.本技术要求2019年12月3日提交的美国专利申请no.16/702,165的优先权。
技术领域
3.本公开的某些实施方式涉及控制系统。更具体地说,本公开的某些实施方式涉及用于监视和控制诸如力矩马达的末端执行器的操作的发动机电子控制器(eec)。例如,eec被配置成响应于触发器(例如,故障)命令从活跃信道切换到备用信道,或者反之亦然。有利的是,,在由于检测到故障而识别出触发器时,无需命令,在命令信号内的周期数或预定时间内自动执行切换。
背景技术:
4.现有的eec系统被用于调节各种装置,诸如燃料流量和推力管理,以优化性能,同时保护系统(例如,车辆的发动机,诸如飞行器)免受危害。例如,该系统可以通过能够提供关于系统安全和操作的信息的一个或多个信道来监测。例如,在eec分析发动机信号,输出信号驱动一个或多个部件以控制系统(例如,阀、泵、致动器等)。
5.对于本领域技术人员来说,通过将这些系统与本技术的其余部分参考附图所述的本公开进行比较,常规和传统方法的进一步限制和缺点将变得显而易见。
技术实现要素:
6.提供了用于发动机电子控制器(eec)以监视和控制末端执行器的操作的系统和/或方法。例如,响应于输入,eec可以采用示例性多处理器命令系统来实现信道切换,将活跃信道切换为备用信道,并将备用信道切换为活跃信道。
7.更具体地说,在公开的实例中,某些实施方式涉及多处理器命令系统,该系统被配置成检测信号以发起切换,发起从现有活跃信道到备用信道的切换,以及发起从现有备用信道到活跃信道的切换。
8.在公开的实例中,多处理器命令系统通过故障监视系统在现有活跃信道中检测故障,发起从现有活跃信道到备用信道的切换,并发起从现有备用信道到活跃信道的切换。
9.在公开的实例中,用于双信道电子控制系统的系统包括在一个或多个冗余信道上的一个或多个末端执行器。控制器监测和控制一个或多个末端执行器的操作。在一些例子中,控制器被配置成将信道指定为活跃信道,所述活跃信道包括将命令电流从控制器发送到所述一个或多个末端执行器的末端执行器,指定第二信道作为备用信道,该备用信道以在正常操作期间维持控制器和末端执行器之间的开放信道,控制所述活跃信道以产生所述活跃信道已经结束对一个或多个末端执行器的控制的信号,接收切换触发器以发起快速信道切换,其中,第二信道自动转换为活跃信道,从第一信道向第二信道发送健康信号,响应于切换命令信号来命令第一信道转换为备用信道,响应于切换命令信号来命令第二信道转
换为活跃信道,以及控制第一信道和第二信道以便在给定时间只有一个信道是活跃的。
10.在一些实例中,切换触发信号对应于系统故障。在实例中,故障对应于阈值方差之外的电流测量。在实例中,故障对应于活跃信道中的处理器复位。在实例中,故障对应于来自备用信道的信号,该信号指示预定数目的连续脉冲的活跃信道的丢失。
11.在一些实例中,切换命令信号是在信道之间切换的预定命令。
12.在一些实例中,第一信道从活跃信道转换为备用信道。控制器接收指示第一信道已经转换为备用信道的确认信号,以及响应于确认信号命令第二信道从备用信道转换为活跃信道。
13.在一些实例中,第一信道包括状态信道和健康信道,状态信道和健康信道在接收切换触发信号之前具有第一占空比。在实例中,当第一信道从活跃信道转换为备用信道时,控制器进一步被配置为将状态信道和健康信道从第一占空比改变为与备用信道相关联的第二占空比。在实例中,第二信道包括状态信道和健康信道,状态信道具有第三占空比,而健康信道具有第四占空比。
14.在实例中,将第二信道从备用转换到活跃包括将状态信道从第三占空比改变到第四占空比。在实例中,通过状态信道占空比等于健康信道占空比来限定活跃信道。在实例中,第一占空比为75%,第二占空比为25%。
15.在一些实例中,从故障确定到第二信道转换为活跃信道的时间段发生在1ms内。
16.在公开的实例中,一种用于双信道电子控制的方法包括:将信道指定为活跃信道,该活跃信道包括将命令电流从控制器发送到一个或多个末端执行器的末端执行器。将第二信道指定为备用信道,备用信道用于在正常操作期间维持控制器和末端执行器之间的开放信道。控制活跃信道以产生活跃信道已经结束对一个或多个末端执行器的控制的信号。接收切换触发器以发起快速信道切换,其中,第二信道自动转换为活跃信道。从第一信道向第二信道发送健康信号。响应于切换命令信号,命令第一信道转换为备用信道。响应于切换命令信号,命令第二信道转换为活跃信道。以及控制第一信道和第二信道,以便在给定时间只有一个信道是活跃的。
17.在一些实例中,第一信道包括状态信道和健康信道,状态信道和健康信道在接收切换触发信号之前具有第一占空比。在实例中,切换触发信号对应于系统故障,该方法进一步包括命令第一信道的健康信号响应于系统故障从第一占空比转换为第二占空比。
18.在一些实例中,该方法包括将第一信道从活跃信道转换为备用信道的。接收指示第一信道已转换为备用信道的确认信号。响应于确认信号,命令第二信道从备用信道转换为活跃信道。在实例中,双信道电子控制在交通工具的控制器上实施,该交通工具包括飞机、轮式交通工具、海上交通工具或轨道交通工具中的一者。
19.在一些例子中,末端执行器是力矩马达、螺线管或致动器中的一者。
20.从下面的描述和附图将更全面地理解本公开的这些和各种其他优点、方面和新颖特征,以及其所示实施方式的细节。
附图说明
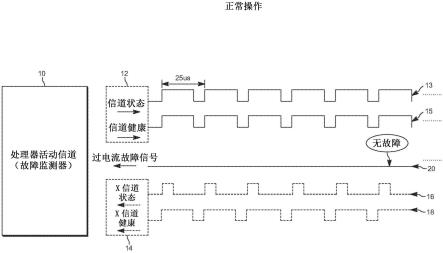
21.图1示出了根据本公开的示例性实施方式的在正常操作条件下多处理器故障监测的示例性过程示意图。
22.图2示出了根据本公开的示例性实施方式的在命令切换期间多处理器故障监测的示例性过程图。
23.图3示出了根据本公开的示例性实施方式的在非命令切换期间多处理器故障监测的示例性过程示意图。
24.附图未按比例绘制。在适当的情况下,类似或相同的参考编号用于指代类似或相同的组件。
具体实施方式
25.切换被限定为活跃信道和备用信道之间的切换(反之亦然)。切换可以响应于故障或其他原因来实现,例如,诸如来自控制器的从活跃信道转换到备用信道的命令。但是,在给定时间只能有一个信道处于活跃状态。其他信道必须处于备用状态,以防止多个源向单个受控设备(例如,末端执行器、力矩马达、螺线管、执行器等)提供电流(例如,命令)。因此,在切换事件期间,活跃信道必须首先禁用所有执行器的控制,然后备用信道才能变为活跃并启用其执行器的控制。
26.在一些实例中,eec包括多个信道,每个信道具有两个或多个处理器。每个信道包括:(1)以第一频率工作的状态和健康信号,(2)以第二频率工作的开放故障检测,以及(3)以另一频率工作的软件。在一些例子中,健康和状态信号都以40千赫的频率工作。
27.状态信号指示特定信道处于哪种状态(例如,活跃、非活跃、备用)。在一些实例中,状态信号最初是非活跃的,直到通过处理器(例如,低级协处理器、外围设备、i/o处理器、增强型时间处理器单元(etpu)微码等)的通电内置测试(pbit)测试来驱动状态信号。在pbit测试之后,状态信号被呈现为空闲,等待来自控制软件的命令以改变为活跃或备用。当信道工作在活跃状态时,该信道提供具有第一占空比(例如,75%占空比)的输出。当工作在备用状态时,该信道提供具有第二,通常是互补的占空比(例如,25%占空比)的输出。因此,当系统初始化时,对应于活跃信道的状态和健康信号都以75%的占空比输出。对应于备用信道的状态信号以25%占空比输出,进一步确保备用信号不向末端执行器提供电流。
28.健康信号以两种方式之一被采用:(1)通知控制器末端执行器的故障,或(2)作为冗余的跨信道状态监测器。例如,确定活跃信道以75%占空比工作指示未发生故障,而确定活跃信道以25%占空比工作指示已检测到故障。在附加的或替代的实例实施方式中,采用相移键控(psk)调制以使单个信号能够携带状态和健康数据。
29.如本文所公开的,命令切换是响应于预定的或预期的触发而发生的切换。协调活跃信道和备用信道之间的切换的目的是确保在任何给定时间只有单个处理器控制单个末端执行器。有利地,这里公开的命令切换过程还使信道之间的切换时间最小化。
30.在命令切换期间,活跃信道从控制器接收从活跃切换到备用的命令信号。响应于命令信号,活跃信道状态信号例如从75%占空比改变到25%占空比。另外或可选地,输出的状态信号被相移,例如270度。
31.此外,在命令切换期间,备用信道接收到从备用信道转换到活跃信道的命令信号。在转换完成之前,备用信道首先接收初始活跃信道已经转换到备用信道的确认。该确认通过监测状态信号和确定占空比已经从例如活跃的75%占空比转变到备用的25%占空比来提供。一旦确认该转换,初始备用信道将输出信号从25%占空比改变为75%占空比,和/或
其状态信号的相位例如偏移270度。
32.另外或可选地,在命令切换之后,健康信号输出从75%占空比改变到25%占空比,和/或健康信号被相移270度。一旦最初被指定为备用信道的信道已经转换为活跃信道,活跃信道就会根据当前软件设置提供命令信号,控制相应的末端执行器(例如,力矩马达(tm)),不中断地继续操作。如上所述,所公开的系统和方法在大约1毫秒的时间帧内实现该过程。
33.或者,所公开的系统和方法可以被植入以实现非命令切换。例如,非命令切换可以响应于在相应的末端执行器(例如,力矩马达)处检测到故障条件而发生。故障可以通过监测活跃信道信号内的变化来识别。在一些实例中,根据与健康状态监测器相关联的切换触发器逻辑来对变化进行评估。
34.例如,当活跃信道上的健康监测器确定在相应的末端执行器(例如,力矩马达)上存在故障条件时,健康监测器将信道的状态标志设置为备用,以便强制非命令切换。响应于故障条件,健康信号从75%占空比改变为25%占空比,和/或信号相移270度。在一些实例中,监测设备控制循环的处理算法识别出状态标志中的变化,并控制活跃设备禁用。类似于命令切换期间的转换,状态信号从75%占空比变化为25%占空比,和/或信号相位偏移270度。在一些实例中,可以使用标志来发信号通知信道状态的改变(例如,从活跃到备用或反之亦然)。在实例中,标志可以表示故障,使得给定故障可以提供唯一的标志(例如,对应于开路、短路、处理器复位等)。
35.因此,状态信号已经完成到备用信道的转换,如25%占空比所指示。作为响应,最初指定为备用信道的信道转换到活跃信道。这是通过状态信号从25%占空比变化到75%占空比,和/或信号相移270度来实现的。
36.在操作期间,在一些实例中,与备用信道相关联的故障监测器监测与活跃信道相关联的健康和状态信号。响应于备用信道健康监测器检测到活跃信道健康信号中的故障,备用信道将备用状态标志改变为活跃状态标志,并在其状态信号上转换到与活跃信道相关联的占空比(例如,75%占空比)。
37.所公开的系统和方法提供了许多优于常规系统的优点。例如,所公开的eec提供握手机制,确保在一时刻(例如,在切换操作期间)仅有单个信道控制每个末端执行器。此外,实现所公开的eec减少了信道切换期间的引擎瞬变(例如,减少了在切换期间末端执行器不被第一信道或第二信道控制的时间量)。所公开的eec还使得在接收到触发器时在减少的时间量中发生切换(例如,在活跃信道上发生故障的大约1毫秒内),这减少了发动机瞬变。
38.此外,所公开的eec提供状态信号的冗余,以确保响应于故障的有效监测和转换。所公开的eec还提供了关于相应的末端执行器/力矩马达(例如,负责诸如燃料控制的系统功能)的低延迟状态信息更新的机制。此外,所公开的eec允许在多频设备驱动器设计中实现定时和/或间隔操作系统。
39.如本文所用,“和/或”指由“和/或”连接的列表中的任何一个或多个项。例如,“x和/或y”是指三元素集{(x),(y),(x,y)}中的任意元素。类似地,“x,y和/或z”是指七元素集{(x),(y),(z),(x,y),(x,z),(y,z),(x,y,z)}中的任意元素。如本文所使用的,术语“模块”指的是可以在硬件、软件、固件或其一个或多个的任何组合中实现的功能。如本文所用,术语“示例性”意味着用作非限制性实例、实例或说明。
40.如本文所使用的,术语“第一”和“第二”可用于枚举相同类型的不同组件或元件,并且不一定意味着任何特定的顺序。例如,虽然在一些实例中,在一个时间段内第一时间发生在第二时间之前,但术语“第一时间”和“第二时间”并不意味着在该时间段内第一时间或第二时间相对于另一时间发生的任何特定顺序。
41.如本文所使用的,“电路”或“电路系统”包括任何模拟和/或数字组件、功率和/或控制元件,例如微处理器、数字信号处理器(dsp)、软件等,分立和/或集成组件,或其部分和/或组合。
42.如本文所用,术语“控制电路”、“控制电路”和/或“控制器”可以包括数字和/或模拟电路、分立和/或集成电路、处理器、微处理器、数字信号处理器和/或其他逻辑电路和/或相关软件、硬件和/或固件。控制电路或控制电路系统可以位于构成控制器的一部分或全部的一个或多个电路板上。
43.如本文所用,术语“存储器”包括易失性和非易失性存储器件和/或其它存储设备。
44.图1示出了示例性过程图,其中,包含故障监测器的处理器10经由由参考数字12标识的状态信道13和健康信道15发送信号中的一个或两者。如图1的实例所示,状态信道信号和健康信道信号都以类似的占空比(约75%,脉冲信号的周期约为25微秒)发送。
45.另外,处理器10从第二处理器接收一个或多个信号。例如,对应于第二处理器的状态信道和健康信道的反馈信号由处理器10接收和分析,并由参考数字14指示。例如,第二处理器的状态信号16以大约25%的占空比为特征,而第二处理器的健康信号18以大约75%的占空比为特征。此外,过电流故障信号20被提供给处理器10。在本实例中,活跃信道处的恒定故障信号表示不存在过电流情况。因此,图1示出了正常工作条件下的多处理器故障监测过程。
46.图2示出了命令切换操作的实例流程图。例如,处理器10通过状态信道和健康信道发送信号中的一个或两个,两者都具有大约75%的占空比和大约25微秒的脉冲信号周期。在图2的实例中,状态信道13作为活跃信道操作。
47.处理器10接收对应于第二处理器的状态信道和健康信道的一个或多个信号,所述第二处理器的状态信道和健康信道由处理器10分析。如图所示,第二处理器的状态信号16以大约25%的占空比为特征,第二处理器的健康信号18以大约75%的占空比为特征。如图所示,状态信道16作为备用信道操作。
48.在图2的实例中,由处理器10发起命令切换操作,例如定时器和/或调度转换。在该实例中,处理器10响应于来自活跃信道13的应用软件(as)的命令(或由硬件故障发起),诸如在活跃信道中的处理器复位或信道使用平衡,来发起信道切换。
49.响应于信道切换的命令,在将第二处理器的状态信道16从备用信道转换为活跃信道之前,活跃信道13放弃对设备的控制并禁用对相应执行器的控制(并启用状态信道16的对相应执行器的控制)。例如,每个信道的状态(例如,活跃或备用)应提供给as,这可以在小于或等于大约5微秒的时间周期内执行。
50.在一些实例中,处理器复位可以由中央控制器(例如,连接到每个相应处理器的中央处理平台)触发以迫使处理器复位,诸如响应于非响应和/或损坏的传感器或终端执行器。在这样的实例中,备用信道将不接收任何信号,并且将命令切换,如本文所公开的。
51.在一些实例中,命令式切换可以响应于确定特定信道的健康分数与另一信道的健
康分数相比,需要从活跃到备用的转换或反之亦然。
52.此外,当在诸如飞机的交通工具中实现切换时,实现信道转换以限制或消除对eec驾驶舱输出(例如,灯、继电器、无线电传输等)的任何操作影响。
53.图3示出了非命令切换操作的示例性过程图。如本文所公开的,通过识别诸如故障(例如,断路条件、短路等)的触发器来发起非命令切换。在一些实例中,故障是由在备用信道(例如,状态信道16)处识别到的在预定数量的连续脉冲(例如,例如,诸如三个,其可以根据期望的响应时间而改变)的活跃信道上的信号丢失引起的。在一些实例中,故障对应于活跃信道上的过电流条件,指示受控设备上的故障,如硬件故障。
54.在图3的实例中,处理器10经由具有大约75%的占空比和大约25微秒的脉冲信号周期的状态信道13和健康信道15中的一个或两个发送信号,并接收对应于第二处理器的状态信道16和健康信道18的信号,这些信号由处理器10分析。如图所示,状态信号16以大约25%的占空比为特征,而健康信号18以大约75%的占空比为特征。
55.在图3的实例中,向处理器10提供指示“过电流信号tm1”的故障信号20,其中,从第一(低)电平到第二(高)电平的转变指示故障,从而产生触发器。尽管将故障信号20描述为过电流状态的指示符,但故障信号20可以对应于各种故障(例如,在活跃信道上的信号丢失)。在接收到故障信号20触发时,健康信道15上的下一个脉冲示出了从75%占空比到25%占空比的转换。在健康信道15转换之后,状态信道13禁止对末端执行器的控制。例如,这可以在给定的时间帧(例如,大约200微秒)和/或预定的周期数(例如,大约4个周期)上发生。
56.如图3所示,在给定时间帧和/或周期数到期后,状态信道13的下一个占空比转换为25%。这表示状态信道13已经从活跃信道转换为备用信道。此外,来自第二处理器的状态信道16从25%占空比转换到75%占空比,指示第二处理器正在控制活跃信道。如图所示,响应于检测到处理器10的状态信道已经转换到备用信道,状态信道16从第二处理器到活跃信道的转换可以在整个占空比上发生。
57.在一些例子中,pwm发生器代码负责产生相关信道的健康信号。在一些例子中,处理器的故障监测器调节信道,以便在任何给定的时间,单个信道控制末端执行器。在这样的实例中,末端执行器仅从单个信道接收命令,以便不从多个信道接收多个竞争和/或相反的命令。
58.故障监测器还被配置成在以备用模式操作时监测交叉信道的健康信号。因此,通过在第一处理器的状态信号处确定占空比已经改变而触发从备用信道到活跃信道的转换,并且第一处理器的状态信号不再作为活跃信道操作。
59.此外,as产生信号以命令特定信道在活跃模式或备用模式下工作。as还为活跃信道和备用信道提供当前设置,这些设置可用于命令活跃信道和备用信道交换状态(响应未命令切换)。
60.参考几个附图,通过本发明公开的创新系统和方法实现了多个优点。
61.虽然已经参考某些实施方式描述了本公开,但本领域技术人员将理解,在不脱离本公开的范围的情况下,可以进行各种改变并且可以替换等价物。此外,在不脱离本公开的范围的情况下,可以做出许多修改以使特定情况或材料适应本公开的教导。因此,本公开不限于所公开的特定实施方式,而是本公开将包括落入所附权利要求书范围内的所有实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。