技术特征:
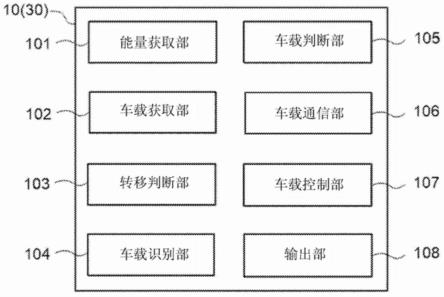
1.一种车内监视系统,包括搭载于车辆的车载器(10、30)和车内监视支援装置(20、40),上述车载器包括:能量获取部(101)、车载获取部(102)、转移判断部(103)、车载识别部(104)、车载判断部(105)、车载通信部(106)以及车载控制部(107),上述车内监视支援装置包括:远程通信部(201)、远程识别部(202)以及远程判断部(203),上述能量获取部获取能量余量,上述能量余量是上述车载器使用的能量的余量,上述车载获取部获取与上述车辆内部的对象物相关的传感器信息,上述转移判断部基于上述能量余量判断是否进行远程处理,在上述转移判断部判断为不进行远程处理的情况下,上述车载识别部基于上述传感器信息识别上述车辆内部的对象物,上述车载判断部基于上述车载识别部的识别结果来判断上述车辆内部的状况,在上述转移判断部判断为进行远程处理的情况下,上述车载通信部将上述传感器信息发送至上述车内监视支援装置,上述远程通信部接收上述传感器信息,上述远程识别部基于上述远程通信部接收的上述传感器信息来识别上述车辆内部的对象物,上述远程判断部基于上述远程识别部的识别结果来判断上述车辆内部的状况,上述远程通信部将上述远程判断部的判断结果发送至上述车载器,上述车载通信部接收上述远程判断部的判断结果,上述车载控制部基于上述车载判断部的判断结果或者上述远程判断部的判断结果来进行对上述车辆内部的控制。2.根据权利要求1所述的车内监视系统,其中,上述车载识别部基于上述传感器信息识别上述车辆内部的对象物,在上述转移判断部判断为不进行远程处理的情况下,上述车载判断部基于上述车载识别部的识别结果来判断上述车辆内部的状况,在上述转移判断部判断为进行远程处理的情况下,上述车载通信部将上述车载识别部的识别结果发送至上述车内监视支援装置,上述远程通信部接收上述识别结果,上述远程判断部基于上述远程通信部接收的上述识别结果来判断上述车辆内部的状况。3.根据权利要求2所述的车内监视系统,其中,在上述能量余量低于第一阈值的情况下,上述转移判断部使上述车载通信部将上述传感器信息发送至上述车内监视支援装置,在上述能量余量在第一阈值以上且在第二阈值以下的情况下,上述转移判断部使上述车载通信部将上述车载识别部的识别结果发送至上述车内监视支援装置。4.根据权利要求1或者权利要求2所述的车内监视系统,其中,上述远程通信部将上述远程识别部的识别结果发送至上述车载器,上述车载通信部接收上述远程识别部的识别结果,
在上述转移判断部判断为进行远程处理的情况下,上述车载判断部基于上述远程识别部的识别结果来判断上述车辆内部的状况。5.根据权利要求4所述的车内监视系统,其中,在上述能量余量低于第一阈值的情况下,上述转移判断部使上述车内监视支援装置进行上述远程识别部的识别以及上述远程判断部的判断,在上述能量余量在第一阈值以上且在第二阈值以下的情况下,上述转移判断部使上述车内监视支援装置进行上述远程识别部的识别。6.根据权利要求1~5中的任意一项所述的车内监视系统,其中,上述转移判断部根据上述能量余量以及基于预先获取的运行计划的能量补给的预测来判断是否进行远程处理。7.根据权利要求1~6中的任意一项所述的车内监视系统,其中,上述远程识别部使用精度比上述车载识别部所使用的识别手段高的识别手段来识别对象物。8.根据权利要求1~6中的任意一项所述的车内监视系统,其中,上述车内监视支援装置还包括远程验证部(204)和支援控制部(205),上述远程判断部基于上述车载识别部的识别结果或者上述远程识别部的识别结果判断为上述车辆内部的状况是正常或者反常,在上述远程判断部的判断结果为反常的情况下,上述远程验证部基于上述远程识别部的识别结果来验证上述车辆内部的状况的反常的程度,上述支援控制部根据上述远程验证部的验证结果来生成用于进行对上述车辆的支援的支援信息。9.根据权利要求1~8中的任意一项所述的车内监视系统,其中,上述车载控制部基于上述车载判断部或者上述远程判断部的判断结果进行注意唤起、对应指示以及温度变更中的至少一个。10.一种车内监视装置,是搭载于车辆的车内监视装置,包括:能量获取部、车载获取部、转移判断部、车载识别部、车载判断部、车载通信部以及车载控制部,上述能量获取部获取能量余量,上述能量余量是上述车内监视装置使用的能量的余量,上述车载获取部获取与上述车辆内部的对象物相关的传感器信息,上述转移判断部基于上述能量余量判断是否进行远程处理,在上述转移判断部判断为不进行远程处理的情况下,上述车载识别部基于上述传感器信息识别上述车辆内部的对象物,上述车载判断部基于上述车载识别部的识别结果来判断上述车辆内部的状况,在上述转移判断部判断为进行远程处理的情况下,上述车载通信部将上述传感器信息发送至进行与上述车载识别部的识别以及上述车载判断部的判断相同的处理的车内监视支援装置,上述车载通信部接收上述车内监视支援装置对上述车辆内部的状况的判断结果,上述车载控制部基于上述车载判断部的判断结果或者上述车内监视支援装置的判断
结果来进行对上述车辆内部的控制。11.一种车内监视程序,用于使计算机执行处理,上述处理包括:能量获取部获取能量余量,上述能量余量是计算机使用的能量的余量;车载获取部获取与上述车辆内部的对象物相关的传感器信息;转移判断部基于上述能量余量判断是否进行远程处理;在上述转移判断部判断为不进行远程处理的情况下,车载识别部基于上述传感器信息识别上述车辆内部的对象物;车载判断部基于上述车载识别部的识别结果来判断上述车辆内部的状况;在上述转移判断部判断为进行远程处理的情况下,车载通信部将上述传感器信息发送至进行与上述车载识别部的识别以及上述车载判断部的判断相同的处理的车内监视支援装置;上述车载通信部接收上述车内监视支援装置对上述车辆内部的状况的判断结果;以及车载控制部基于上述车载判断部的判断结果或者上述车内监视支援装置的判断结果来进行对上述车辆内部的控制。
技术总结
本发明涉及车内监视系统、车内监视装置以及存储介质。转移判断部(103)基于获取的能量余量判断是否进行远程处理,在判断为不进行远程处理的情况下,车载识别部(104)识别车辆内部的对象物,车载判断部(105)基于识别结果判断车辆内部的状况,在判断为进行远程处理的情况下,车载通信部(106)将传感器信息发送至进行与车载识别部的识别以及车载判断部的判断相同的处理的车内监视支援装置,接收车内监视支援装置对车辆内部的状况的判断结果,车载控制部(107)基于判断结果来进行对车辆内部的控制。制。制。
技术研发人员:舩桥淳一郎
受保护的技术使用者:株式会社电装
技术研发日:2020.11.27
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。