用于喂食动物的喂食系统和方法
1.本发明涉及一种用于喂食动物、具体地是牛、比如奶牛或肉牛的喂食系统。
2.ep 2134161 a1披露了一种用于动物的自动喂食系统。喂食系统包括混合装置、控制装置、多个喂食区域以及饲料测量设备。通常例如基于泌乳期或产奶量将动物分组,每组具有不同的饲料需求。每组动物都可以进入其中一个喂食区域。控制装置控制混合装置,以便根据所选配方准备饲料。这批混合饲料容纳在自动喂食装置中,该自动喂食装置将这批混合饲料运送到喂食区域,以便动物能够从中进食。饲料测量设备反复测量喂食区域已有的混合饲料量。控制装置反复将测得的喂食区域内的剩余混合饲料量与阈值进行比较。可以例如由养殖者为每个喂食区域单独设置阈值。如果测得的其中一个喂食区域内的剩余混合饲料量下降到阈值以下,则控制装置向混合装置发送命令,以根据所选配方准备后续饲料。选择阈值,使得在喂食区域的动物的饲料用尽之前有足够的时间来混合后续饲料并将其输送到喂食区域。换句话说,在其中一个喂食区域的剩余饲料量为0之前,就开始准备后续饲料。因此,动物随时都能进食。众所周知,这对于奶牛的产奶量而言尤为必要。
3.然而,这种喂食系统的操作并不是最优的。阈值是以喂食区域始终有饲料的方式来设置的,但是如果饲料长时间放置,则饲料的质量就会下降。当选择阈值时,养殖者必须寻求确保动物随时都能进食与保持饲料质量(特别是新鲜度)之间的折衷方法。难以准确地选择这种阈值。为了确保动物随时都能进食,养殖者在实践中会选择较高的阈值,而不是较低的阈值。这意味着实际上总是没有必要地提早将后续饲料输送到喂食区域。因此,饲料不太新鲜,导致动物的采食量不是最佳的。
4.本发明的目的是提供一种改进的喂食系统,其中,特别是增加了动物的采食量。
5.根据本发明,通过一种喂食系统来实现该目的,该喂食系统用于使用来自饲料供应源的饲料来喂食至少一个喂食处的动物、特别是牛、比如奶牛或肉牛,即该喂食系统可以包括含有动物饲料的饲料供应源、以及一个或多个用于至少当该喂食系统运行和/或安装在养殖场上时使用来自饲料供应源的饲料来喂食动物的喂食处,并且其中,该喂食系统包括:
[0006]-至少一个自主喂食装置,该至少一个自主喂食装置包括容器,用于容纳来自饲料供应源的饲料,其中,该自主喂食装置被配置为将装在容器中的饲料运送到一个或多个喂食处并在该一个或多个喂食处发放该饲料,
[0007]-饲料量测量装置,用于反复测量可用的和/或已有的供该喂食处或每个喂食处的动物消耗的饲料量的饲料量值,以及
[0008]-控制系统,该控制系统被配置为从饲料量测量装置接收在不同测量时刻、在该喂食处或每个喂食处测得的饲料量值,
[0009]
其中,控制系统被配置为将从饲料量测量装置接收的多个饲料量值存储在存储器中,并且控制系统还被配置为基于存储在存储器中的多个饲料量值来确定(特别是计算)变量的至少一个值,该变量表示至少在最后一次测量时刻和/或此时刻之后的一个周期内饲料量值与时间之间的关系、即与饲料量值随时间的变化过程或减少相关。
[0010]
使用上述已知的喂食系统,将每个饲料测得量与阈值进行比较,并且在比较之后
弃用或删除。在每种情况下,只有一个饲料测得量与阈值进行比较。如果饲料测得量大于阈值,则不采取行动,如果饲料测得量小于阈值,则控制装置控制混合装置以便混合后续饲料。与这种已知的喂食系统相比,根据本发明的饲料量的测得值不会弃用或删除,而是将其存储在控制系统的存储器中、比如存储在养殖场的计算机上的存储器中、喂食系统制造商的服务器上的存储器中、云存储中的存储器中或以其他方式存储。
[0011]
在不同测量时刻测得的多个饲料量值包含消耗率(即该喂食处或每个喂食处的饲料量减少的速率)变化的信息。根据本发明,将在不同时间点在该喂食处或每个喂食处测得的多个饲料量值进行存储可以推导出饲料量值随时间的变化过程,并且还可以预测最后一次测量时刻之后的所述进程。饲料量值与时间之间的关系取决于饲料消耗的变化、即动物的消耗率。如果控制系统基于存储在存储器中的该喂食处或每个喂食处的饲料量值来计算表示至少在最后一次测量时刻之后(即在最后一次测量饲料量值并将其存储在存储器中的时间之后)一个周期内的饲料量值随时间的变化过程的变量(比如在最后一次测量时刻和此时刻之后的消耗率,或在最后一次测量时刻之后的一个或多个时间点的饲料量、或另一个变量)的一个或多个值,则该计算考虑了消耗率的任何变化。在本文中,“变量”也指术语“饲料变量”,表示该变量与动物的喂食有关。变量的(多个)值取决于饲料量值随时间变化。
[0012]
附带地,在最后一次测量时刻和/或此时刻之后的一个周期(在这段时间控制系统计算表征饲料量值与时间之间的关系的变量的一个或多个值)可以包括过去的时间点、当前时刻(“实时”)和/或未来时刻。例如,如果最后一次饲料量值是在一小时前测量的,则控制系统可以对预测从一小时前的最后一次测量时刻或者从当前时刻直至一个或多个未来时刻为止的饲料量值与时间之间的关系的变量的值进行计算。计算该变量的一个或多个值以预测在最后一次测量时刻和/或此时刻之后的饲料量值与时间之间的关系具有特别的优点。
[0013]
控制系统可以用多种不同的方式使用该变量的(多个)计算值来更可靠和准确地控制喂食系统。特别地,控制系统可以被配置为基于饲料变量的(多个)计算值来控制喂食系统,以确定自主喂食装置应该何时将后续饲料运送到喂食处。根据本发明,计算表示至少在最后一次测量时刻和/或此时刻之后的一个周期内的饲料量值与时间之间的关系的变量的(多个)值,使得例如可以准确地预测在该喂食处或每个喂食处的饲料何时将用尽或者在这种情况发生之前还剩余多少时间。基于该变量的(多个)计算值,根据本发明的控制系统可以控制喂食系统,将后续饲料装载到自主喂食装置中和/或使自主喂食装置将其运送到喂食处。在这种情况下,例如,要考虑准备这批后续饲料并将其运送到喂食处并通过自主喂食装置进行发放所花费的时间。因此,根据本发明的喂食系统不仅可以确保在喂食处始终有饲料,而且还可以在更准确的时间将后续饲料输送到喂食处(“按时喂食”)。因为剩余饲料较少,所以更有效地保持了喂食处的饲料质量,从而增加了动物的采食量并减少了饲料损失。
[0014]
换句话说,ep 2134161 a1中已知的喂食系统以被动方式工作。如果测得的混合饲料剩余量只是刚刚下降到阈值以下(为了安全起见已将该阈值设置得相对较高)、并且为了确保始终有饲料,通常会过早地将后续饲料输送到喂食区域。如果测得的混合饲料剩余量没有完全下降到阈值以下,则只在下次测量时才会触发添加饲料,并且到那时可能剩余的饲料太少,从而使得后续饲料输送得太晚。相比之下,根据本发明的喂食系统是主动式的。
在添加饲料时,考虑了饲料量值随时间的变化过程,以便可以在更准确的时间将后续饲料输送到喂食处。
[0015]
附带地,根据本发明的喂食处可以按不同方式配置。优选的是,该喂食处或每个喂食处包括用于喂食(比如动物棚中的动物)的饲料围栏,其中,自主喂食装置被配置为自主地将装在容器中的饲料从饲料供应源转移到饲料围栏,并且沿着饲料围栏自主发放和/或配发该饲料。
[0016]
在根据本发明的优选实施例中,控制系统被配置为基于由控制系统确定的变量的至少一个值来产生或发出特别是时间相关的饲料用尽信号,该变量表示至少在最后一次测量时刻和/或此时刻之后的一个周期内的饲料量值与时间之间的关系。特别地,饲料用尽信号与一个或多个喂食处的未来耗尽时间t2相关。饲料用尽信号表示该喂食处或每个喂食处的饲料何时用尽(时刻)或者在这种情况发生之前还剩余多少时间(时段)。饲料用尽信号可以包括未来耗尽时间t2本身或直至该耗尽时间为止的时段。因此,从饲料量值与时间之间的预测关系中推导出饲料用尽时的耗尽时间或者在这种情况发生之前还剩余多少时间。当根据本发明的控制系统产生饲料用尽信号时,由此确定该喂食处或每个喂食处的饲料何时用尽。控制系统还可以被配置为基于饲料用尽信号来确定开始装载后续饲料或开始运送已装载到喂食处的饲料的开始时间。
[0017]
附带地,代替首先产生饲料用尽信号并基于该饲料用尽信号得到开始时间,根据本发明,控制系统还可以被配置为直接基于计算出的表征预测的饲料量值随时间的变化过程的变量来确定开始时间和/或产生或发送开始命令。因此,发出饲料用尽信号(即作为中间步骤计算在该喂食处或每个喂食处的饲料何时将用尽或者在这种情况发生之前还剩余多少时间)是有利的,但不是必要的。
[0018]
根据本发明,术语“用尽”一个或多个喂食处的饲料被理解为动物不吃或几乎不吃这些喂食处的饲料,实际上通常存在动物在进食的同时进行挑拣而留下来的剩余饲料量。在优选实施例中,未来耗尽时间对应的时间点为:根据由控制系统计算出的变量值表征的饲料量值和时间之间的预测关系,饲料量值等于或下降到优选地预设的有效或实际空值以下,该空值对应于在该一个或多个喂食处的剩余饲料量。换句话说,未来耗尽时间由喂食处的饲料量值下降到该喂食处的有效空值以下的时间点形成。
[0019]
控制系统可以被配置为通过基于由控制系统确定的对饲料量值随时间的变化过程进行预测的变量的值来分析饲料量值何时等于或下降到该喂食处的有效空值以下,来确定未来耗尽时间或直至该耗尽时间出现为止的时段。当控制系统预测了在最后一次测量时刻之后的一个周期内的饲料量值与时间之间的关系时,控制系统能够确定饲料量值何时下降到该有效空值以下。有效空值对应于基本上不再适合动物消耗或在实践中不再被动物食用的剩余饲料量。换句话说,当达到有效空值时,饲料就“用尽”了,即使仍有少量剩余饲料。在这个意义上,该喂食处或每个喂食处的饲料“用尽”的时间点是耗尽时间。控制系统能够准确且可靠地预测未来耗尽时间,并且在此基础上确定将后续饲料装载到自主喂食装置中和/或由自主喂食装置将其运送到喂食处的正确时刻,以便在准确的时间将该后续饲料输送到喂食处。
[0020]
应当注意,根据本发明的有效空值与ep 2134161 a1中已知的上述阈值不同。如已经说明的那样,这种已知喂食系统将每个饲料测得量与阈值进行比较,并且如果饲料测得
量在该阈值以下,则这是对后续饲料进行混合的触发。该阈值始终被选择为大于零,以便有足够的时间混合下批饲料并将其输送给动物。然而,根据本发明的有效空值形成“零值”,即对应于“空的”喂食处。测得的饲料量值不与有效空值进行比较,显然该零值也不构成准备后续饲料的触发,毕竟,当达到该有效空值时,饲料已经用尽。根据本发明的有效空值仅用于确定饲料何时实际“用尽”,即耗尽时间。
[0021]
在替代性实施例中,控制系统被配置为通过基于由控制系统确定的对饲料量值随时间的变化过程进行预测的变量的值来分析饲料量值下降率(特别是消耗率)何时等于或下降到该喂食处的消耗率的阈值以下,来确定未来耗尽时间或者直至该耗尽时间出现为止的时段。如果预测的饲料量值不再减少或几乎不再减少,即剩余饲料量不再被食用,则喂食处实际上是空的。在喂食处的预测消耗率下降到消耗率的阈值以下的时间点,并且在这种意义上该喂食处的饲料“用尽”,则形成耗尽时间。然后,控制系统可以在此基础上再次确定输送后续饲料的正确时刻。
[0022]
在根据本发明的优选实施例中,控制系统被配置为基于饲料用尽信号、特别是基于未来耗尽时间t2或直至该耗尽时间t2为止的时段来控制喂食系统、特别是至少控制自主喂食装置和/或饲料装载系统将饲料从饲料供应源装载到自主喂食装置的容器中,以便在动物将这些喂食处中的一个或多个喂食处的饲料基本上吃完之前,由自主喂食装置在该一个或多个喂食处发放后续饲料。基于饲料用尽信号,控制系统可以计算开始时间t1,以确定何时必须开始将后续饲料装载到自主喂食装置中和/或通过自主喂食装置将其运送到喂食处,以便将该后续饲料按时准确输送到喂食处。因此,基本上确保动物随时可以进食,同时饲料质量保持最佳。
[0023]
在根据本发明的实施例中,变量表示在最后一次测量时刻和/或此时刻之后的消耗率,以此消耗率,可用的和/或已有的供该喂食处或每个喂食处的动物消耗的饲料量在该喂食处减少。控制系统特别地被配置为确定表示在最后一次测量时刻、在一个或多个喂食处的各自的消耗率的变量。在每个测得的饲料量值之后,变量的值随后更新或刷新,即控制系统分别通过最后测得的饲料量值来动态地调整变量。控制系统可以被配置为基于存储在存储器中的饲料量值来确定至少在最后一次测量时刻和/或此时刻之后(例如直至当前时刻为止)的表示该喂食处或每个喂食处的消耗率的变量的至少一个值,即该喂食处或每个喂食处的“实时”或未来(比如提前2小时或6小时或12小时)消耗率。在该喂食处或每个喂食处的消耗率被理解为是指可用的供该喂食处的动物消耗的饲料量减少的速率。一旦确定了消耗率,控制系统就可以例如在此基础上调整喂食系统,使得其在所需的时间点将后续饲料输送到该喂食处或每个喂食处。因此,可以使添加饲料的时机更准确。这样显著提高采食量并减少饲料损失。
[0024]
在根据本发明的实施例中,确定表示饲料量值与时间之间的关系的变量的一个或多个值包括:针对存储在存储器中的每个最后测得的饲料量值,基于存储在存储器中的多个饲料量值,通过函数拟合、特别是“曲线拟合”分别确定饲料量值h随时间t变化的关联函数h(t)。在这种情况下,控制系统被配置为通过函数拟合来预测饲料量值与时间之间的关系。控制系统优选地被配置为反复或连续确定函数h(t),即控制系统动态调整函数h(t)。例如,函数h(t)可以在每次测得的饲料量值之后更新或刷新。因此,预测模型是自学习或机器学习的。另外,控制系统是自适应的,即在收集数据的同时使用测得的饲料量值,并且预测
模型进行学习以更准确地确定函数h(t)(“在线学习”)。函数h(t)分别被添加到每个测得的饲料量值和关联的测量时刻,该函数是控制系统基于测得的饲料量值和先前测得的饲料量值确定的。当测量新的饲料量值时,控制系统再次确定新的函数h(t),该函数可能与先前的函数h(t)略有不同。因此,控制系统根据最后可用信息来调整喂食操作计划,因此可以在非常准确的时间添加饲料。已经发现,预测足够准确,同时所需的计算能力仍然有限,并且喂食系统自动调整以适应变化的环境。
[0025]
根据本发明,控制系统可以被配置为确定不同的函数关系。在优选实施例中,饲料量值h随时间t变化的函数h(t)包括指数函数(特别是e
λt
)、或者底数与数字e不同的指数函数,其中,参数λ小于0,其表示至少在最后一次测量时刻和/或此时刻之后的饲料量值与时间之间的关系的变量,特别是表征消耗率,并且t是时间,并且其中,控制系统被配置为基于存储在存储器中的多个饲料量值,通过函数拟合、特别是“曲线拟合”来计算指数函数中的参数λ的值。在这种情况下,假设饲料量值随时间呈指数变化变化。因此,偏离的测得值被强制纳入该指数变化。出人意料地,发现在最后一次测量时刻和/或此时刻之后的一个周期内,饲料量值与时间之间的关系的预测非常准确。
[0026]
在这种情况下,根据本发明,进一步优选的是,控制系统被配置为通过求解方程来计算函数h(t)中的时间t的值,该方程是饲料量值随时间t变化的函数h(t)等于剩余饲料量的有效空值h
res
,其中,时间t的计算值表示喂食处的未来耗尽时间t2。控制系统优选地被配置为针对每个喂食处求解该方程。控制系统还可以被配置为针对喂食处中的每个喂食处的时间基于该计算值来产生饲料用尽信号。换句话说,通过求解方程h(t)=h
res
,控制系统确定何时一个或多个喂食处的饲料实际上用尽或者在这种情况发生之前还剩多少时间。在此基础上,控制系统然后可以确保在准确的时间将后续饲料输送到喂食处,即不会太早从而保持饲料新鲜,也不会太晚从而使动物随时都能进食。
[0027]
根据本发明,还可以将控制系统配置成基于对存储在存储器中的饲料量值的时间相关选择而确定表示至少在最后一次测量时刻和/或此时刻之后饲料量值与时间t之间的关系的变量的一个或多个值。根据本发明,控制系统可以使用存储在存储器中的一组n个最后测得的饲料量值。因此,该多个n饲料量值可以由最后测得的饲料量值和前一步的饲料量值组成。在这种情况下,使用最近的测量值。n个饲料量值的数目可以是动态的。如果有多个喂食处,例如可以将控制系统配置为监测何时在每个喂食处发放饲料,并且基于在每个喂食处发放饲料时测得的饲料量值和随后在该喂食处测得的饲料量值、特别是在自主喂食装置当在一个或多个其他喂食处发放饲料时经过该喂食处的情况下,针对每个喂食处单独确定表示至少在最后一次测量时刻和/或此时刻之后的饲料量值与时间t之间的关系的变量。换句话说,在每次测量饲料量之后,n值都会增加。例如,n个饲料量值的数目在5与500之间。例如,如果分别分析最后30个测得的饲料量值(n=30)并且每天测量大约10次饲料量值,则控制系统基于大约3天(即实际上在实践中几乎一直由自主喂食装置配发连续多批饲料的一个周期)来确定函数h(t)。然后将不同的各轮喂食的测得的饲料量值相结合。已经发现,对于小组饲料量值,比如n=30,预测足够准确,同时所需的计算能力仍然有限,并且喂食系统自动调整以适应变化的环境。如果n较小,例如n=5,则控制系统基于一轮或两轮喂食来确定函数h(t),并且随时间t变化的饲料量值的函数h(t)调整得更快。因此,喂食系统可以考虑动物的昼夜节律。
[0028]
也可以通过其他方式来考虑动物的昼夜节律。在根据本发明的特定实施例中,控制系统被配置为根据时刻来确定对存储在存储器中的饲料量值的时间相关选择。基于时刻,控制系统随后能够设置时间窗口,并且控制系统仅基于在该时间窗口期间的一天或几天测得的饲料量值来确定表示饲料量值与时间t之间的关系的变量。例如,如果时间是上午10:00h,则控制系统可以设置从10:00h到12:00h的时间窗口。然后,将前几天在10:00h与12:00h之间测得的饲料量值用于预测。在晚些时候,例如在下午14:00h,控制系统将时间窗口从14:00h转换到16:00h,等等。在这种情况下,控制系统被配置为设置动态时间窗口。然而,也可以选择一个或多个固定时间窗口。然后,控制系统从在连续周期内测得的多个n饲料量值中选择在设置时间窗口(比如从6:00h到12:00h或从00:00h到6:00h,即在早上或晚上)期间测得的那些饲料量值。特别地,考虑到动物的昼夜节律,则挑选该选择。
[0029]
在根据本发明的优选实施例中,喂食系统包括饲料装载系统,用于将饲料从饲料供应源装载到自主喂食装置的容器中。根据本发明,可以用不同方式配置饲料装载系统。
[0030]
例如,自主喂食装置的容器可以包括用于将装在容器中的饲料进行混合的混合装置。饲料装载系统可以将来自饲料供应源的饲料(特别是不同类型的饲料)装载到自主喂食装置的容器中,之后自主喂食装置的混合装置将装在容器中的饲料进行混合,以产生混合饲料。自主喂食装置然后将混合饲料运送到一个或多个喂食处。在这种情况下,自主喂食装置形成混合和喂食装置。附带地,在自主喂食装置开始将饲料运送到一个或多个喂食处之前,自主喂食装置的容器中的饲料可能已经准备好,即可以预先装载这批饲料。
[0031]
然而,根据本发明,饲料装载系统也可以包括用于对饲料进行混合的固定混合装置。固定混合装置例如被配置为容纳与自主喂食装置的容器中的单批饲料相对应的一定量的饲料。在这种情况下,饲料装载系统被配置为将来自饲料供应源的饲料装载到固定混合装置中,并且将来自固定混合装置的混合饲料装载到自主喂食装置的容器中,以便在其中形成混合饲料。随后,自主喂食装置将混合饲料运输到喂食处。在这种情况下,喂食装置也不是混合装置,喂食装置仅被配置为配发饲料。同样在这种情况下,在混合饲料被装载到自主喂食装置的容器中之前,该批饲料可能已经在固定混合装置中预混合。
[0032]
此外,固定混合装置可以被配置为容纳与自主混合装置的容器中的多批饲料相对应的一定量的饲料。例如,固定混合装置中的饲料被预混合,以便在其中形成的库存混合饲料量,然后可以将其中一部分饲料装载到自主喂食装置的容器中,以便形成用于在一个或多个喂食处配发的混合饲料。换句话说,预先在固定混合装置中准备好库存混合饲料量,以便将饲料从该固定混合装置装载到自主喂食装置的容器中。
[0033]
不论饲料装载系统的实施例如何,优选的是,控制系统被配置为基于变量的一个或多个确定的、特别是计算出的值、和/或基于该(这些)值产生的饲料用尽信号,控制饲料装载系统和/或自主喂食装置将后续饲料装载到自主喂食装置的容器中和/或将已装载在自主喂食装置的容器中的后续饲料运送到喂食处。特别地,控制系统被配置为基于变量的一个或多个确定的、特别是计算出的值、和/或基于该(这些)值产生的饲料用尽信号,控制饲料装载系统和/或自主喂食装置开始将后续饲料装载到自主喂食装置的容器中、或者将已装载在自主喂食装置的容器中的后续饲料运送到喂食处。
[0034]
在这种情况下,控制系统可以被配置为基于变量的一个或多个确定的或计算出的值、和/或基于该(这些)值产生的饲料用尽信号,确定开始装载后续饲料和/或将装载的后
续饲料运送喂食处的开始时间。控制系统可以被配置为基于未来耗尽时间t2或直至耗尽时间t2出现为止的时段来确定开始时间t1。此外,控制系统可以被配置为在开始时间向饲料装载系统发送开始装载后续饲料的开始命令,或向自主喂食装置发送开始将已装载的饲料运送到喂食处的开始命令。
[0035]
在饲料在自主喂食装置的容器中进行混合的实施例中,通过向饲料装载系统发送开始将后续饲料装载到自主喂食装置的容器中的开始命令以将饲料从饲料供应源转移到自主喂食装置的容器中。如果饲料已装载到自主喂食装置的容器中,则可以立即开始将这批饲料运送到喂食处,随后自主喂食装置接收到相对应的开始命令。
[0036]
对于包括分别仅混合一批饲料的固定混合装置的饲料装载系统,开始将后续饲料装载到自主喂食装置的容器中可以被理解为意味着饲料装载系统接收到开始命令,将来自饲料供应源的饲料装载到固定混合装置中以便在其中形成混合饲料,随后将来自固定混合装置的混合饲料装载到自主喂食装置的容器中。饲料经由固定混合装置装载到自主喂食装置的容器中。
[0037]
如果在固定混合装置中已经准备了相对较大量的库存混合饲料量,则开始将后续饲料装载到自主喂食装置的容器中意味着饲料装载系统接收到开始命令,将饲料从该固定混合装置装载到自主喂食装置的容器中以便在其中形成混合饲料。
[0038]
根据本发明,对于饲料装载系统的上述和其他可能的实施例,优选的是,控制系统基于变量的(多个)计算值和/或基于在该(这些)值的基础上产生的饲料用尽信号来控制后续饲料的装载和/或将可选地已装载的饲料运送到一个或多个喂食处。因此,控制系统可以准确地设置期望时刻,此时在该喂食处或每个喂食处配发该后续饲料中的饲料,即根据本发明的喂食系统能够更准确地在期望时间将饲料添加到喂食处。例如,如此控制,动物总是有高质量的新鲜饲料可供使用。
[0039]
根据本发明,用于开始装载后续饲料和/或将已装载的后续饲料运送到喂食处的开始时间t1(即控制系统向饲料装载系统发送开始装载后续饲料的开始命令或向自主喂食装置发送开始将已装载的饲料运送到喂食处的开始命令的时间点)可以基于饲料用尽信号、特别是未来耗尽时间t2或者直至该耗尽时间t2出现为止之前的时段。根据本发明,这可以以不同的方式发生。
[0040]
特别地,控制系统被配置为针对该喂食处或每个喂食处通过从该未来耗尽时间t2反推计算至少一个时间间隔x来确定开始时间。如果控制系统确定了耗尽时间t2,则控制系统将耗尽时间t2之前至少时间间隔x的时间点确定为开始装载后续饲料和/或将已装载的后续饲料运送到一个或多个喂食处的开始时间t1。因此,确保一直有供动物进食的饲料,同时可以计划尽可能晚地添加饲料。这样提高了采食量,减少饲料了损失,并且在更长时段内保持饲料质量。
[0041]
例如,在控制系统中选择该喂食处或每个喂食处的时间间隔x作为固定周期。在这种情况下,固定时间间隔可以由养殖者或服务技术人员手动输入到控制系统中,或者可以由控制系统计算并自动设置。固定时间间隔例如在10分钟与3小时之间。在实践中,这种时间间隔通常足以准备后续饲料、装载饲料、以及将饲料运送到喂食处并进行发放。
[0042]
时间间隔x优选地是动态的。在根据本发明的特定实施例中,控制系统被配置为基于装载后续饲料所需的装载时间来确定时间间隔x。所需的装载时间取决于例如用于后续
饲料的所选的配给量、后续饲料的数量(以kg计)以及关联的混合时间。可以将不同配给量存储在控制系统的存储器中。控制系统可以从存储在存储器中的配给量中选择配给量,之后根据所选的配给量来装载后续饲料。配给量包括按预定比例(kg)的不同种类饲料。通常,根据本发明的喂食系统适于能够根据不同配给量来配制饲料,因为动物的饲料需求随时间变化。例如,奶牛的饲料需求取决于泌乳期。此外,在实践中,通常根据泌乳期或产奶量将奶牛分组,每组具有不同的饲料需求。养殖者可以手动选择其中一种配给量,或者控制系统被配置为基于一个或多个喂食处的饲料需求来自动选择配给量。特别地,控制系统根据已对饲料量值进行测量的喂食处来确定具体配给量的饲料需求。然而,准备一种配给量可能比准备另一种配给量需要更多的时间。这也取决于所需的后续饲料量和关联的混合时间。为了进一步改进添加饲料的时间,控制系统可以考虑准备后续饲料所需的装载时间。
[0043]
另外,自主喂食装置到达各个喂食处所花费的时间可能不同。一个喂食处可能比另一个喂食处更靠近饲料供应源。为了使输送饲料的时间更准确,根据本发明,控制系统可以被配置为确定用于通过自主喂食装置将装在容器中的饲料运送到一个或多个喂食处的输送或行进时间,其中,控制系统还被配置为基于该输送或行进时间来确定该喂食处或每个喂食处的时间间隔x。
[0044]
在根据本发明的特定优选实施例中,饲料量测量装置被装配到自主喂食装置上,其中,该饲料量测量装置被配置为当自主喂食装置经过该喂食处时测量该喂食处或每个喂食处的饲料量值。优选地,自主喂食装置还包括饲料推动装置,该饲料推动装置用于在与自主喂食装置的移动或行进方向成直角的方向上推动饲料。例如,饲料推动装置被配置为将沿着饲料围栏放置并且在动物进食时被动物推离饲料围栏的饲料推回到饲料围栏。
[0045]
根据本发明,自主喂食装置的容器还可以包括用于从容器中发放饲料的发放装置,其中,相对于发放装置,饲料量测量装置被装配到自主喂食装置上,以便当测量饲料量值时将由发放装置刚刚发放的饲料量包括在内。换句话说,当测量已有的供该喂食处或每个喂食处的动物消耗的饲料量时,由自主喂食装置配发的饲料量被即刻包括在内。在这种情况下,饲料推动装置可以被配置为推动由自主喂食装置发放的饲料。换句话说,当饲料从自主喂食装置的容器中排出时,该饲料通过推动立即形成几堆。然后,饲料量测量装置测量被推动的饲料,该饲料包括喂食处已有的饲料和新配发的饲料。
[0046]
对于ep 2134161 a1中已知的喂食系统,饲料测量系统包括多个测量单元,每个喂食区域具有其自己的测量单元。这些测量单元必须连接到控制装置,以便传送测得的喂食区域的剩余混合饲料量。有线连接既麻烦又复杂,而动物棚中的无线连接实际上总是存在连接问题。尽管在上述公开专利中没有描述,但是通过将测量单元附接到自动喂食装置上,可以仅使用单个测量单元。例如,从lely的自动喂食系统中已知这一点。当自主喂食装置随后经过喂食区域时,该测量单元测量剩余饲料量。为了保证新的饲料被及时输送到喂食区域,使用ep 2134161 a1中已知的方法,必须进行定期检查以确定在喂食区域处仍然有足够的饲料可用。自动喂食装置必须相对频繁地经过喂食区域,以便分别测量每个喂食区域的剩余饲料量并将其与阈值进行比较。这意味着自动喂食装置通常仅出于测量目的而带着空容器行进,而不会将饲料输送到喂食区域(“扫描运行”)。因此,喂食系统的容量将会降低,自主喂食装置的效率将会降低,具有相对较高的功耗,并且比如电池等部件的使用寿命将会受到不利影响。
[0047]
与ep 2134161 a1中已知的方法相比,由于根据本发明的喂食系统计算变量(其表示至少在最后一次测量时刻和/或此时刻之后的一个周期内的饲料量值随时间减少)的一个或多个值并且在此基础上确定何时应该将后续饲料装载和/或输送到喂食处,所以根据本发明的自主喂食装置能够较少地四处行驶。尽管在例外情况下,喂食处的消耗率可能很低,以至于期望在此期间测量附加饲料量值,即除了驱动自主喂食装置发放饲料和/或堆积饲料之外,通常不需要四处行驶。根据本发明的自主喂食装置实际上仅行进到喂食处以在实践中输送饲料或堆积饲料。每当自主喂食装置在一个或多个喂食处输送饲料或堆积饲料时,测量这些喂食处的饲料量值。在这些时刻测得的饲料量值足以使根据本发明的控制系统确定准备和/或输送后续饲料的最佳时间。因此,根据本发明的喂食系统的容量增加,并且具有根据本发明的结合饲料量测量装置的自主喂食装置能够以特别有效和节能的方式操作。
[0048]
代替计算表示在最后一次测量时刻和/或此时刻之后的消耗率的变量或除此之外,控制系统可以被配置为基于存储在存储器中的饲料量值来计算在最后一次测量时刻和/或此时刻之后的一个周期内的该喂食处或每个喂食处的至少一个表征饲料量值随时间的变化过程的其他变量的一个或多个值。例如,该变量表示可用的和/或已有的供该喂食处或每个喂食处的动物消耗的饲料量。在这种情况下,控制系统可以被配置为基于存储在存储器中的多个饲料量值来确定、特别是计算在最后一次测量时刻之后的一个或多个时间点的可用的和/或已有的供该喂食处或每个喂食处的动物消耗的饲料量的一个或多个饲料量值。通过预测最后一次测量时刻之后的饲料量值,还可以准确地估计一个或多个喂食处的饲料何时用尽。在此基础上,控制系统还能够确定开始将后续饲料装载到自主喂食装置中和/或自动运送后续饲料的最佳开始时间,从而在准确的时间输送新鲜饲料。
[0049]
代替上述用于计算参数λ(形成表示在最后一次测量时刻和/或此时刻之后的消耗率的变量)的值的函数拟合过程或除此之外,控制系统可以被配置为以不同的方式预测该变量或以其他方式确定其他变量。换句话说,可以用不同方式配置根据本发明的预测过程。在根据本发明的特定实施例中,控制系统被编程有不同的自学习或机器学习算法,该算法被配置为接收存储在存储器中的多个饲料量值,其中,控制系统被配置为使用自学习或机器学习算法来计算变量的一个或多个值,例如表示在最后一次测量时刻和/或此时刻之后的消耗率的变量、或者在最后一次测量时刻之后的一个或多个时间点的可用的和/或已有的供该喂食处或每个喂食处的动物消耗的饲料量的饲料量值。
[0050]
例如,自学习算法被配置为接收样本,优选地分别针对每个喂食处接收样本,每个样本包括表示测量时刻之一的值、在该测量时刻的饲料量值以及消耗率的关联值。这些实例可以包括其他时间相关参数,比如从在喂食处的最后饲料输送起的实耗时间和/或在预设持续时间(例如过去的5小时或10小时)实耗期间在喂食处发放的饲料量(kg)。例如,通过在一个月或两个月或更长时间作为历史数据被收集的实例来训练自学习算法。为了训练这种种算法,可以在相对较长的时间内将不同饲料围栏甚至不同养殖场的实例进行组合。该算法可用的实例越多,该算法能够学习得越好。
[0051]
例如,可以向该算法馈送将在第一测量时刻测得的饲料量值和表示该测量时刻的值和任何其他时间相关参数作为输入并且将在该第一时刻的消耗率的关联值作为输出的第一实例、以及将在第二时刻测得的饲料量值、表示该测量时刻的值和再次的任何其他时
间相关参数作为输入并且将在该第二时刻测得的饲料量值作为输出的第二实例,等等。
[0052]
该算法被配置为识别在不同测量时刻测量并存储在存储器中的饲料量值之间的相关性(即统计关系),这取决于作为输入的在该喂食处或每个喂食处的一个或多个关联的时间相关参数以及作为输出的消耗率的值。该算法使用模式识别。基于所识别的相关性,如果存储在存储器中的测得的饲料量值具有表示最后一次测量时刻的值和可选的其他时间相关参数作为输入被呈现给算法,则该算法然后可以确定在最后一次测量时刻和/或此时刻之后喂食处的消耗率的值作为输出,特别是预测未来。优选地,控制系统使用存储在存储器中的在该喂食处或每个喂食处的最后测得的饲料量值。最后测得的饲料量值是用于准确预测的重要参数。
[0053]
在充分训练自学习算法之后,相关性原则上是固定的(“离线学习”)。如果自学习算法随时间的变化过程变得不太准确,则可以使用新的实例再次训练该算法。基于接收到的实例中的模式识别,经过充分训练的自学习算法可以确定在最后一次测量时刻和/或此时刻之后在该喂食处或每个喂食处的消耗率的值。随后,控制系统可以基于消耗率的值来计算例如在最后一次测量时刻之后的一个或多个时间点的一个或多个饲料量值。通过使用该算法,本质上考虑了动物对饲料消耗的变化(比如昼夜节律),使得喂食系统可以(实际上)准确地按时将后续饲料输送到喂食处(“按时喂食”)。这有利于动物的采食量并减少饲料损失。
[0054]
在根据本发明的特定实施例中,控制系统被配置为将存储在存储器中的饲料量值按时间分组,每组从在输送饲料之后即刻测量的饲料量值开始、并且在输送饲料之前即刻测量的饲料量值结束。在这种情况下,控制系统可以被配置为特别地通过比如“曲线拟合”等函数拟合来针对这些组饲料量值h-n
中的每一组来计算饲料量值h随时间t变化的函数h(t)中的参数λ的值,该函数包括指数函数(特别是e
λt
),并且其中,参数λ分别表示该组饲料量值h-n
的消耗率,即不是在最后一次测量时刻之后而是刚好在最后一次测量时刻之前的消耗率,并且t是时间。在这种情况下,自学习算法可以首先用实例来训练,每个实例包括作为输入的在测量时刻的饲料量值和可选的其他时间相关参数、以及作为输出的与该时刻相关的参数λ的计算值。然后,自学习算法可以进一步被配置为基于存储在存储器中的最后测得的饲料量值和可选的其他时间相关参数(作为输入)来确定、特别是预测(即使用上述具有e
λt
的指数函数)函数h(t)中的参数λ的值(作为输出)。换句话说,如果输入存储在存储器中的最后测得的饲料量值和可选的其他时间相关参数,则训练的自学习算法使用参数λ作为输出来确定在最后一次测量时刻之后饲料量值随时间的变化过程。
[0055]
随后,控制系统可以例如被配置为计算在最后一次测量时刻之后的一个或多个时间点的一个或多个饲料量值,之后控制系统确定预测饲料量值何时下降到与剩余饲料量相对应的有效空值以下。然后,还可以确定在最后一次测量时刻之后,饲料将于何时用尽(即未来耗尽时间t2)或者在这种情况发生之前还剩余多少时间。
[0056]
根据本发明,自学习算法也可以根据输入(其包括存储在存储器中的测得的饲料量值)并结合表示的关联测量时刻的值和可选的其他时间相关参数来直接预测最后一次测量时刻之后的一个或多个饲料量值,而不是通过首先预测消耗率来计算最后一次测量时刻之后的一个或多个时间点的饲料量值。这种算法也可以被训练并产生令人满意的预测结果。因此,在根据本发明的替代性实施例中,自学习算法可以被配置为基于作为输入存储在
存储器中的测得的饲料量值来确定在最后一次测量时刻之后在该喂食处或每个喂食处的一个或多个饲料量值作为输出。在这种情况下,控制系统可以被配置为基于在该喂食处或每个喂食处的该一个或多个计算出的饲料量值来确定开始时间。基于存储在存储器中的多个饲料量值,根据本发明的算法可以学习饲料量值随时间的变化过程、并预测最后一次测量时刻之后的饲料量值。换句话说,在该喂食处或每个喂食处,控制系统确定最后一次测量时刻之后的饲料量。基于一个或多个计算出的饲料量值,控制系统然后确定开始装载后续饲料和/或运送已装载的饲料的开始时间。因此,还可以确保喂食处的动物实际上随时都能进食,同时通过尽可能晚地添加饲料来将喂食处的饲料的质量维持在高水平。
[0057]
本发明还涉及一种通过如上所述的喂食系统自动喂食动物(特别是牛,比如奶牛或肉牛)的方法,该方法包括以下步骤:
[0058]-反复测量已有的供该喂食处或每个喂食处的动物消耗的饲料量的饲料量值,
[0059]-将在不同测量时刻测得的该喂食处或每个喂食处的多个饲料量值存储在控制系统的存储器中,
[0060]-基于存储在存储器中的饲料量值,确定、特别是计算变量的至少一个值,该变量表示饲料量值与时间之间的关系、特别是在最后一次测量时刻和/或此时刻之后的至少一个周期内与饲料量值随时间的变化过程或减少相关。
[0061]
根据本发明的方法具有与上述根据本发明的喂食系统相同的技术效果和优点。
[0062]
现在将通过附图更详细地说明本发明,在附图中:
[0063]
图1示出了根据本发明的喂食系统的示意性俯视图。
[0064]
图2a、图2b分别示出了在一天和几天期间测得的饲料量值的图表。
[0065]
图3a、图3b、图3c、图3d示出了测得的饲料量值和饲料量值与时间之间关系的计算函数的图表。
[0066]
图4示出了一个周期内测得和计算出的饲料量值的示意性图表。
[0067]
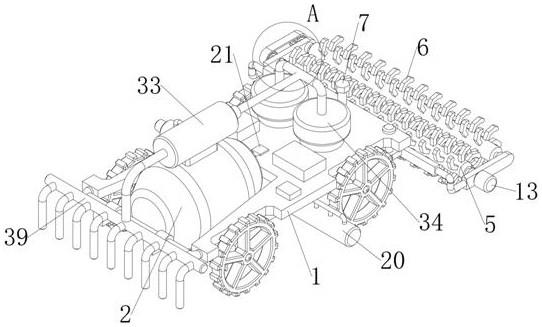
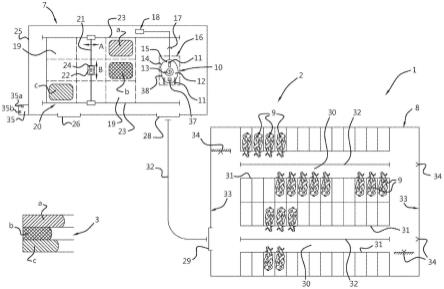
在图1中整体上用附图标记1表示用于喂食动物、特别是牛(比如奶牛或肉牛)的喂食系统。喂食系统1布置在操作区域2中。喂食系统1包括:包含多种饲料类型a、b、c的饲料源3;在该示例性实施例中包含相同饲料类型a、b、c的饲料供应源7;容纳动物9的动物棚8;以及用于用饲料供应源7的饲料来喂食动物9的自主喂食装置10。虽然在图1中示意性地示出的饲料储库3包括三个相邻的包含饲料类型a、b、c(比如青贮饲料)的料仓,但是饲料储库3可以包括另外的储存装置和/或饲料类型,比如包含散装饲料(例如玉米、马铃薯和/或甜菜)的塔式料仓、或压缩草捆。同样,饲料供应源7还可以包含多于图1所示的三种饲料类型a、b、c,比如浓缩饲料。显然,操作区域2还可以可选地包含住宅、一个或多个另外的动物棚、棚和其他建筑物(未示出)。
[0068]
在该示例性实施例中,用于喂食动物9的自主车辆10被配置为自推进式饲料运输车。显然,根据本发明,喂食系统1可以包括多于一个自主饲料运输车10、特别是两个自主饲料运输车10(未示出)。通过车轮11,饲料运输车10可在地板、养殖场或其他地面上移动。饲料运输车10包括用于容纳饲料的容器12。在该示例性实施例中,在容器12中提供用于切割和/或混合饲料的混合装置13。提供发放装置14以便从容器12发放和/或配发饲料。发放装置14例如包括可在关闭位置与打开位置之间移位的门。
[0069]
饲料运输车10可通过用于驱动饲料运输车10(未示出)并使之转向的驱动和转向
系统而自主移位。饲料运输车10的驱动和转向系统可通过饲料运输车10的控制单元15来控制。在该示例性实施例中,驱动和转向系统包括用于每个后轮11的电驱动马达(未示出)。后轮11的电驱动马达可彼此独立地控制。通过控制后轮11的旋转速度,饲料运输车10可以直线向前或向后行驶或转弯。
[0070]
驱动和转向系统包括用于储存电能的电池系统(未示出)。电池系统连接到电驱动马达。在图1中,饲料运输车10位于饲料装载站16,饲料运输车10的容器12在该饲料装载站填充饲料。饲料装载站16包括用于为饲料运输车10的电池系统充电的充电系统18的充电点17。因此,饲料装载站16也用作充电站。饲料运输车10的控制单元15被配置为控制混合装置13,以便当饲料运输车10连接到充电点17并且饲料运输车10的电池系统通过充电系统18充电时,混合装置13将装在容器12中的饲料混合。
[0071]
在该示例性实施例中,饲料供应系统7形成饲料厨房,即中间饲料储库。饲料厨房包括多个饲料储存区域19,以容纳饲料类型a、b、c以及可选的其他饲料类型(未示出)。饲料储存区域19彼此分开,饲料储存区域19例如由青贮饲料块或压制草捆所在的地板上的标记空间形成。此外,饲料储存区域19中的一个或多个可以包括用于容纳比如玉米、马铃薯或甜菜等散装饲料的料槽。例如,饲料厨房的容量限于几天。能够容纳在饲料厨房7中的饲料类型a、b、c的饲料量小于储存在饲料储库3中的这些饲料类型a、b、c的饲料量。
[0072]
提供饲料装载装置20以用于在饲料运输车10位于饲料装载站的情况下将饲料从饲料厨房7转移到饲料运输车10的容器12。在该示例性实施例中,饲料装载装置20包括可移动的运送轨道21,该可移动的运送轨道可移位地(参见箭头a)布置在两条固定的运送轨道23上,这两条固定的运送轨道被布置成相互平行且彼此间隔开。可移动的运送轨道21包括可沿其移位(参见箭头b)的手推车22。手推车22设置有可竖直移位的饲料抓斗24,以从饲料储存区域19抓取饲料。悬挂在手推车22上的饲料抓斗24可以在基本水平的平面内移位,以便位于每个饲料储存区域19的上方。
[0073]
根据本发明的喂食系统1包括具有存储器35a的控制系统35。尽管在图1中示意性地示出控制系统35位于左侧,但控制系统35也可以布置在不同地点。存储器35a可以包括:养殖场的计算机上的存储设施;喂食系统1的制造商的经由互联网与控制系统35连接的服务器、和/或云存储和/或其他设施。
[0074]
饲料抓斗24由控制系统35控制。配给量数据存储在存储器35a中。例如,配给量数据包括针对不同组的动物9的多种配给量。基于所选的配给量的配给量数据,即按所需比例(kg)的饲料类型混合饲料,当饲料运输车10位于饲料装载站16处时,饲料抓斗24从饲料储存区域19将一定量的饲料类型a、b、c取至饲料运输车10的容器12,以便将所选的配给量容纳在容器10中。通过将多种饲料类型转移到饲料运输车10的容器12中,根据所选的配给量以及取决于饲料需求的所需量,在该容器中产生饲料类型混合饲料,即按所需比例的饲料类型混合饲料(kg)。
[0075]
换句话说,为了组成该批饲料,饲料抓斗24分别从其中一个饲料储存区域19中取出一定量的饲料,饲料抓斗24将该饲料移位穿过饲料储存区域19,直至其位于饲料运输车10的容器12上方为止,然后将该饲料投入容器12中。饲料运输车10包括称重装置37,该称重装置被配置为测量在容器12中容纳的饲料的重量(kg)。称重装置37连接到控制系统35。当将饲料装载到饲料运输车10的容器12中时,控制系统35监测每种饲料类型a、b、c有多少饲
料(kg)被装载到容器12中。
[0076]
显然,饲料供应源7和饲料装载系统20也可以被不同地配置。饲料抓斗24例如也可以结合在饲料运输车10中。在这种情况下,饲料运输车10的饲料抓斗向容器12装载具有所需成分的所需量的饲料,特别是直接从饲料储库3装载。此外,代替图1中所示的饲料储存区域19或除此以外,喂食系统1可以包括一个或多个其他饲料供应装置,比如用于容纳从料仓切下的压制的草捆或块的从动传送带,结合用于从这种草捆或块释放饲料的释放装置(例如,切割器或刀片,特别是所谓的“草捆粉碎机”)、和/或包括用于计量排出饲料的螺旋钻的用于散装饲料的料槽(比如所谓的“货柜”)、和/或塔式料仓和/或其他装置。在这种情况下,饲料装载装置可以设置有一个或多个从动传送带,用于将饲料从该饲料供应装置或每个饲料供应装置移位到饲料运输车10的容器12。
[0077]
另外,饲料可能不在饲料运输车10的容器12中被混合和/或切割,而是在布置在饲料供应源7(未示出)附近的固定混合器中被混合和/或切割。在这种情况下,饲料抓斗24和/或其他饲料供应装置将饲料从饲料供应源7装载到固定混合器中。在通过固定混合器进行混合和/或切割之后,将混合饲料装载到饲料运输车10中。因此,饲料运输车10的容器12不必包含混合装置。在这种情况下,固定混合器分别可以接纳一定量的饲料,其对应于针对饲料运输车10的容器12的单批饲料。然而,固定混合器也可以具有为饲料运输车10的容器12容纳和准备多批饲料的能力。然后,固定混合器中的饲料量形成预混合饲料量,该预混合饲料量被分批供送到饲料运输车10的容器12,即用于多轮喂食。
[0078]
饲料厨房7被安全围栏25环绕。在安全围栏25中设置出入门26,使得例如铲车或牵引车可以经由出入门26进入饲料厨房7,以便用来自饲料储库3的不同饲料类型a、b、c补充饲料储存区域19。另外,安全围栏25包括用于饲料运输车10的通道门28。饲料运输车10可以通过通道门28进出饲料厨房7。显然,安全围栏25可以仅包括一个门,饲料运输车10和牵引车或铲车都可以经由该门进出饲料厨房7。而且,图1中的安全围栏25可以延伸到饲料装载站16和通道门26的左侧,在这种情况下,安全围栏25保护包含饲料储存区域19的饲料厨房7,但是饲料装载站16可经由通道门26(未示出)自由进入。
[0079]
除了安全围栏25之外,喂食系统1还可以包括其他安全特征,例如使饲料运输车10和/或饲料装载系统20立即停止的紧急停止装置。在这种情况下,例如,可以发出警报和/或向使用者发送消息,比如向智能电话发送电子邮件或文本消息。
[0080]
动物棚8包括门开口29,饲料运输车10可以经由该门开口进出动物棚8。门开口29可由棚门关闭,该棚门优选地可自动打开。在该示例性实施例中,动物棚8具有两个喂食通道30。显然,可以提供更多或更少的喂食通道。在该示例性实施例中,每个喂食通道30的任一侧由饲料围栏31界定。换句话说,动物棚8包括四个饲料围栏31。各饲料围栏31形成用于喂食动物9的喂食处。动物9可以沿着饲料围栏31彼此相邻。动物9被定位成使得它们的头部转向喂食通道30并且能够将头部穿过饲料围栏31,以便吃到由饲料运输车10沿着饲料围栏31放置的饲料。
[0081]
动物棚8中的饲料围栏31与饲料厨房7的饲料装载站16相距一定距离。饲料运输车10可从饲料装载站16到达每个饲料围栏31。在操作区域2中布置多种不同的信标。在该示例性实施例中,信标由设置在动物棚8的地板或另一地面、墙壁33以及碰撞点34之中或之上的条带32形成。饲料运输车10包括传感器系统(未示出),该传感器系统被配置为与信标32、
33、34协作。另外,饲料运输车10包括陀螺仪(未示出),以便直线向前行进预定距离。陀螺仪连接到饲料运输车10的控制单元15。
[0082]
除了配给量数据之外,控制系统35的存储器35a包含多种其他数据,比如导航数据和操作数据。导航数据包括来自信标32、33、34的信标数据。基于导航数据,饲料运输车10可以沿从饲料装载站16到动物棚8并经过该动物棚的不同路线行进。操作数据包括例如用于操作饲料运输车10的发放装置14的操作数据。
[0083]
根据本发明,饲料运输车10包括饲料量测量装置38,用于测量供动物9消耗的饲料量的饲料量值,该饲料量测量装置沿着饲料运输车10经过的饲料围栏31设置。饲料量测量装置38包括例如激光器,其测量沿着饲料围栏31的饲料高度(h,以mm为单位)。可以根据测得的饲料高度h来计算饲料围栏31的饲料量。在该示例性实施例中,饲料量测量装置38装配在饲料运输车10上。当饲料运输车10行驶经过饲料围栏31时,饲料量测量装置38测量饲料量值h。每当饲料运输车10行驶经过饲料围栏31时,饲料量测量装置38测量关联的饲料量值h。
[0084]
在该示例性实施例中,饲料运输车10包括用于在与饲料运输车10的行进方向成直角的方向上推动或堆积饲料的饲料推动装置(未示出),即饲料推动装置将沿着饲料围栏31放置的饲料以及动物9在进食期间移开饲料围栏31的饲料推回到该饲料围栏31。在这种情况下,饲料推动装置还使已发放的新鲜饲料移位。换句话说,在发放装置14已经发放了新鲜饲料之后,该新鲜饲料立即与仍然沿着饲料围栏31放置的饲料一起堆积起来。饲料量测量装置38装配在饲料运输车10上,以便当测量饲料量时将刚刚由发放装置14存放的饲料包括在内,即发放装置14首先从饲料围栏31前方的容器12中配发饲料,然后饲料量测量装置38即刻测量该饲料围栏31的饲料量值。该测得的饲料量值取决于尚未食用的饲料量(即先前被发放并被推回到饲料围栏31的饲料量)、以及在该饲料围栏31配发的新鲜饲料量。
[0085]
控制系统35被配置为接收测得的沿着饲料围栏31的饲料量值。饲料量值首先暂时地存储在饲料运输车10的控制单元15的存储器中。在饲料运输车10返回饲料装载站16之后,测得的饲料量值被发送到控制系统35并存储在控制系统35的存储器35a中。
[0086]
图2a、图2b分别示出了在一天和几天期间实际测得的两个饲料围栏31的饲料量值的图表,这些饲料量值存储在存储器35a中。如图所示,每个饲料围栏31的饲料量值分别随时间下降,直至在该饲料围栏31配发后续饲料的饲料为止。饲料量值的下降率(即消耗率)对于每个饲料围栏31是不同的。这取决于例如沿着饲料围栏31的动物9的数量和那些动物9(比如高产奶牛、低产奶牛、无奶奶牛等)的泌乳期。尽管饲料量值随时间的变化过程不规则,但是根据本发明的控制系统35能够准确地预测在最后一次测量时刻之后的一个周期内饲料量值与时间之间的关系。为此,控制系统35确定表示饲料量值随时间的变化过程的变量的一个或多个值。这可以通过多种方式实现。
[0087]
将通过图3a至图3d说明预测表征饲料量值与时间之间的关系的变量的一个或多个值的第一实施例。
[0088]
举例来说,图3a示出了在多轮连续喂食中测得的饲料量值随时间t变化的图表。如上所述,饲料运输车10的饲料量测量装置38测量沿着饲料围栏31堆积的饲料带的绝对饲料高度h(以mm为单位)。该绝对饲料高度h形成饲料量值(即该饲料围栏31的饲料量的量度),并且沿着图3a中的y轴绘制。
[0089]
每轮喂食从饲料中的饲料被配发的时刻开始,直至饲料已经用尽的时刻为止。换句话说,每轮喂食都以发放完饲料之后即刻测量的饲料量值开始,并且以发放后续饲料之前即刻测量的饲料量值结束。控制系统35的存储器35a存储饲料运输车10何时行驶以发放饲料,即控制系统35记录是否在饲料围栏31发放饲料之后即刻测量饲料量值。
[0090]
在图3a所示的示例中,每轮喂食包括多个测得的饲料量值,即在所有不同的各轮喂食期间,也测得多个饲料量值并存储在控制系统35的存储器35a中。显然,在每轮喂食期间,可以收集和存储更多或更少的饲料量值。饲料量值的数目等于n,控制系统35用该数目来预测表示饲料量值与时间之间的关系的变量的值,其中,n例如在5与500之间。
[0091]
在该示例性实施例中,控制系统35假设饲料量值与时间之间呈指数关系。对于饲料量值h随时间t变化的函数h(t),控制系统35采用包含e
λt
的指数函数,比如n
·eλt
,其中,参数λ小于0,其表示至少在最后一次测量时刻和/或此时刻之后的饲料量值与时间之间的关系的变量。参数λ与消耗率直接相关。n是常数,比如100。控制系统35被配置为基于存储在存储器35a中的多个n饲料量值,通过函数拟合、特别是“曲线拟合”来计算e
λt
的指数函数中的参数λ的值。
[0092]
对于每个最后测得的饲料量值,控制系统35分别基于一轮或多轮喂食的多个n饲料量值来确定饲料量值h随时间t变化的函数h(t)。因此,控制系统35被配置为通过再次确定每个最后一次测量的参数λ反复或连续预测饲料量值与时间之间的关系的函数h(t),即控制系统35动态调整函数h(t)。因此,该算法是“在线学习”意义上的自学习或机器学习,即控制系统35使用以测得的饲料量值的形式收集的数据来学习和自适应地预测函数h(t)。
[0093]
为了确定参数λ,可以分别仅使用一轮喂食的饲料量值。相比之下,控制系统35还可以将多轮喂食的测得的饲料量值进行组合。这在图3b中展示。在这种情况下,控制系统35可以被配置为重新调整测得的饲料量值的大小,以便每次最大饲料量值都具有相同值。换句话说,在该示例性实施例1中(参见图3b),在配发之后即刻测量的绝对饲料高度值h分别被转化成固定值。尽管多轮喂食的饲料高度h的绝对峰值(以mm为单位)在实践中总是彼此不同,如图3a所示,但是根据定义,饲料量值的相对峰值是相等的。在图3b中,图表的沿y轴的饲料量值也用h表示,从而形成相对饲料量值。控制系统35可以说是将图3a中所示的示例的连续各轮喂食的测得的饲料量值彼此叠加。在这种情况下,时间t被转换为自最后一次喂食操作以来的时间,在图中3b也用t表示,即分别从饲料中配发新鲜饲料所经过的时间。
[0094]
为了随后进行函数拟合,相对饲料量值h和自最后一次喂食操作以来的时间t的自然对数可以例如采用线性回归通过直线来近似。在图3c中,通过线性回归计算的直线显示为倒数第二次测量的饲料量值。这条直线的斜率决定了表征消耗率的参数λ。以这种方式,控制系统35为每个测得的饲料量值确定参数λ的值,并且因此函数h(t)可能分别略有不同。控制系统35将函数h(t)添加到每个测得的饲料量值和关联的测量时刻,该函数是控制系统35基于该测得的饲料量值和先前测得的饲料量值确定的。当测得新的饲料量值时,控制系统35再次确定新的函数h(t),该函数可能不同于先前的函数h(t)。因此,控制系统35使用最近的可用信息,并且控制系统35可以准确地预测饲料量值随时间减少。
[0095]
附带地,当基于通过线性回归计算的参数λ的值来确定函数h(t)时,沿着x轴(水平)或沿着y轴(竖直)的图形可以被转置,以便最后测得的饲料量值落在图表上。在这种情况下,函数h(t)通过参数λ的计算值进行动态更新,并且由于图形的移动而进一步动态调
整,以便最后测得的饲料量值位于图形上。但是,第二次动态调整是可选的,也可以仅基于参数λ的计算值进行准确预测。然后,饲料量值随时间的变化过程可以说是仅由峰值确定。
[0096]
当控制系统35已经基于测得和存储的饲料量值确定了饲料量值h与时间t之间的关系的函数h(t)时,则控制系统35可以基于该函数h(t)通过求解方程h(t)=h
res
容易地确定未来绝对饲料量值h(以mm为单位)下降到剩余饲料量h
res
以下时的时间t2,其中,通过函数拟合确定的参数λ的值被写入函数h(t)中,并且函数h(t)还可选地被水平或竖直转置,以便使最后测得的饲料量值h落在图表上,并且其中,h
res
是对应于剩余饲料量的有效空值。控制系统35被配置为针对每个饲料围栏31求解该方程。
[0097]
剩余饲料量是动物9在进食期间挑拣出来的并且不再或几乎不再被动物9食用的饲料量。在实践中,实际上在饲料围栏31处总是会有这种种剩余饲料量。饲料量值h
res
对应于该剩余饲料量,并且形成有效零值。如果在饲料围栏31处达到饲料量值h
res
,则该饲料围栏31实际上是空的,即饲料“用尽”,即使仍有剩余饲料。在该示例性实施例中,例如养殖者或服务技术人员将饲料量值h
res
手动地选择为有效空值并且设置在控制系统35中。饲料量值h
res
优选地可针对每个饲料围栏31单独调整。
[0098]
因此,控制系统35被配置为通过求解方程h(t)=h
res
来计算函数h(t)中的时间t的值。时间t的计算值指示饲料围栏31何时变空,即该饲料围栏31的未来耗尽时间t2。换句话说,通过求解针对每个饲料围栏31的方程,控制系统35确定实际上该饲料围栏31的饲料何时用尽。图3d示出了两个连续测得的饲料量值的预测耗尽时间t2和t2'。从图3d中可以看出,预测耗尽时间t2'根据最后测得的饲料量值略有调整。
[0099]
每个饲料围栏31的消耗率可以在一天(24小时)内变化。消耗率取决于动物9的昼夜节律。为了考虑动物9的昼夜节律,控制系统35用来预测饲料量值的数目n可以选择为相对较小,比如n=5。n越小,预测的动态调整就越多。可选地,控制系统35还可以被配置为基于存储在存储器中的多个n饲料量值的时间相关选择来确定参数λ,这例如取决于一天当中的时间点。代替存储在存储器中的所有n个最后测得的饲料量值,控制系统35然后例如仅使用在动态调整的时间窗口期间(比如在一天当中的当前时间之后的给定时段内)测得的饲料量值。考虑到动物的昼夜节律,特别地对该选择进行调整。
[0100]
取决于未来耗尽时间t2,或直至该耗尽时间为止的时段,控制系统35产生饲料用尽信号。饲料用尽信号表示在该喂食处或每个喂食处的饲料何时用尽(时间点)或者在这种情况发生之前还剩余多少时间(时段)。控制系统35基于每个饲料围栏31的未来耗尽时间t2或直至该耗尽时间为止的时段的计算值而产生饲料用尽信号。基于饲料用尽信号,控制系统35则可以控制喂食系统,以便在更准确的时间将后续饲料输送到饲料围栏31,即不会太早从而保持饲料新鲜,也不会太晚从而使动物9随时都能进食。
[0101]
特别地,控制系统35通过从未来耗尽时间t2反推计算至少一个时间间隔x来确定开始将后续饲料装载到饲料运输车10的容器12中的开始时间t1,该时间间隔使得在动物9将该饲料围栏31的饲料基本吃完之前由饲料运输车10将后续饲料发放到饲料围栏31(也参见图3d)。换句话说,控制系统35在开始时间t1向饲料装载系统20发送开始将后续饲料装载到饲料运输车10中的开始命令,使得有足够的时间将后续饲料装载在饲料运输车10的容器12中并混合,有足够的时间行驶到饲料围栏31,并且在该饲料围栏31的饲料实际上用尽之前配发饲料。在图3d中,当前时间用t0表示。
[0102]
针对控制系统35中的每个饲料围栏31,时间间隔x可以选择为是固定的。由养殖者或服务技术人员例如手动地将固定时间间隔x输入到控制系统35中,优选地基于从向饲料装载系统20发送开始装载后续饲料的开始命令到由饲料运输车10在饲料围栏31处实际配发饲料所需的时段的经验。然而,固定时间间隔x也可以由控制系统35自动计算和调整。固定时间间隔x例如在10分钟与3小时之间。在实践中,这种种时间间隔x通常足以准备后续饲料并将其运送到饲料围栏31并在饲料围栏处进行发放。
[0103]
然而,时间间隔x优选地是可变的。控制系统35例如根据所选的配给量、根据饲料需求的后续饲料量(kg)以及关联的混合时间来确定时间间隔x。准备后续饲料所需的时段取决于所选的配给量。控制系统35可以针对每个配给量根据饲料运输车10中的配给量来确定准备后续饲料需要多长时间。显然,所需的时段也取决于后续饲料量。此外,所需的混合时间影响装载和准备后续饲料的装载时间。
[0104]
另外,饲料运输车10行驶到各个饲料围栏31所需的时间可能变化。饲料围栏31位于离饲料厨房7不同距离处,并且通向饲料围栏31的不同路线也是可能的。控制系统35可以确定用于沿一条或多条路线行驶到达不同饲料围栏31的输送时间或行进时间,并且还使时间间隔x依赖于此。
[0105]
在控制系统35在开始时间t1向饲料装载系统20发出开始根据所选的配给量将所需的后续饲料量装载到饲料运输车10中的开始命令之后,饲料运输车10装载该后续饲料,饲料在饲料运输车10中混合持续设定混合时间,然后饲料运输车10自主行驶到一个或多个具有饲料需求的饲料围栏31,以便为动物9配发饲料。
[0106]
在实践中,养殖场实际上总是具有多个饲料围栏31。当一个饲料围栏31的饲料用尽时,饲料运输车10将自动在该饲料围栏31添加饲料。在这种情况下,饲料运输车10可以在沿着多个其他饲料围栏31的路线上行驶,从而在这些其他饲料围栏31处也测量饲料量值。由于根据本发明的喂食系统1将测得的饲料量值存储在存储器35a中、并且控制系统35基于准确预测的耗尽时间t2确定开始准备后续饲料的开始时间t1,因此几乎没有必要仅仅为了收集饲料量值而使饲料运输车10行驶。如果饲料运输车10仅在行驶以在具有饲料需求的饲料围栏31处输送饲料时测量饲料量值、并且同时在沿着一个或多个饲料围栏31的路线上行驶、然后还在这些饲料围栏31处收集饲料量值,则控制系统35具有足够的饲料量值来准确地确定开始时间t1。
[0107]
如以上指示的,根据本发明,也可以用其他方式预测饲料量值随时间的变化过程。将通过图4说明预测表征饲料量值与时间之间的关系的变量的一个或多个值的第二实施例。该第二实施例使用不同的自学习算法35b,并且可以产生非常可靠的预测,但是比上述第一实施例需要更多的计算能力。如果控制系统35相对简单,则不总是能够提供所需的计算能力。
[0108]
在这种情况下,饲料量值可以在控制系统35的存储器35a中存储和保留几个月或更长时间。当根据本发明的喂食系统1运行时,可以在存储器35a中收集更多的在不同测量时刻测量的饲料量值。在存储器35a中,控制系统35可以访问关于在各个饲料围栏31中的每个饲料围栏处测得的饲料量值随时间的变化过程的大量数据。甚至可以组合不同养殖场的测量数据,以便训练这种自学习算法35b。
[0109]
通过自学习算法35b对控制系统35进行编程,该自学习算法被配置为识别在不同
测量时刻测量并存储在存储器35a中的饲料量值之间的相关性,即统计关系。自学习算法35b则例如被配置为接收每个饲料围栏31的输入和输出的实例。每个实例的输入包括在测量时刻的饲料量值、表示该测量时刻的值以及其他时间相关参数,比如从在饲料围栏31处最后一次饲料存放起经过的时间和/或在预设持续时间(例如,前5小时或前10小时)的前一周期内在该饲料围栏31处已经发放的饲料量(kg)。每个实例的输出(“目标”)包括消耗率的关联值,控制系统35可以基于饲料量值随时间的变化过程来计算该值。这将在下面更详细地说明。通过这种实例来训练自学习算法35b。
[0110]
为了分析每个饲料围栏31的实例,控制系统35可以被配置为将存储在存储器中的饲料量值按时间分组,每个组对应于一轮喂食。每组以饲料发放后直接测得的饲料量值开始,并且以在后续饲料被发放之前即刻测量的饲料量值结束。可能是因为控制系统35的存储器存储了当饲料运输车10行驶以发放饲料时的时刻,即控制系统35记录了是否在饲料围栏31处发放饲料之后即刻测量的饲料量值。
[0111]
在这种情况下,如图4所展示的,分析每组饲料量值h-n
,示意性地示出了一个饲料围栏31的饲料量值随时间的变化过程。在不同测量时刻测得的饲料量值h-1
、h-2
、......h-n
用实心点表示。当前时间用t0表示。位于图4中时刻t0的左侧的饲料量值h-1
、h-2
、......h-n
过去已被测量并存储在控制系统35的存储器35a中。基于这些饲料量值h-1
、h-2
、......h-n
(其在实践中可以包括例如两个月,即远多于图4中所示的八个饲料量值h-1
、h-2
、......h-8
),根据该实施例的控制系统35使用自学习算法35b在最后一次测量时刻之后计算饲料量值h1、h2、......hn,在这种情况下是未来饲料量值。
[0112]
为此目的,控制系统35首先再次通过函数拟合(“曲线拟合”)为每组饲料量值(h-n
)计算指数函数中的参数λ的值,例如n
·eλt
,其中,λ表示消耗率,t是时间,并且n是常数,比如100。这意味着假设饲料量值分别假定随时间呈指数变化。在这种情况下,向自学习算法35b馈送的每个实例包括在测量时刻的饲料量值h-n
(其是表示该测量时刻的值),并且进一步包括作为输入的其他时间相关参数、以及作为输出的参数λ的关联值(“目标”),该值是使用函数拟合计算的。
[0113]
自学习算法35b然后能够识别输入与输出之间的相关性,即统计关系。基于识别的相关性,该算法随后可以预测参数λ(其形成了在最后一次测量时刻和/或此时刻之后对饲料围栏31的消耗率的度量)的值作为输出。换句话说,如果存储在存储器中的最后测得的饲料量值h-1
与表示该最后一次测量时刻的关联值和其他时间相关参数一起作为算法的输入,则自学习算法35b产生参数λ的值作为输出。因此,用于饲料量值随时间的变化过程的函数h(t)是固定的,其包括贯穿存储在存储器中的最后测得的饲料量值h-1
的指数函数n
·eλt
。
[0114]
在该示例性实施例中,自学习算法35b因此使用存储在存储器35a中的最后测得的饲料量值h-1
作为预测的起始点。这个最后测得的饲料量值h-1
和关联的时间相关参数一起形成自学习算法35b的输入。基于该输入,自学习算法35b在通过接收到的实例中的模式识别进行了充分训练之后,在最后一次测量时刻和/或此时刻之后,以参数λ的形式确定饲料围栏31的消耗率的值(即表示饲料围栏31已有的供动物消耗的饲料量在饲料围栏31处减少的速率的值)作为输出。
[0115]
控制系统35可以被配置为随后通过函数h(t)来计算在最后一次测量时刻之后的时间点的饲料量值hn,之后控制系统35确定预测饲料量值何时下降到与剩余饲料量h
res
相
对应的有效空值以下(图4中的a)。这决定了饲料将在最后一次测量时刻之后何时(即未来耗尽时间t2)用尽或者在这种情况发生之前还剩余多长时间。换句话说,通过消耗率的计算值,控制系统35可以通过消耗率的预测值来计算饲料量值h1、h2、......hn在最后一次测量时刻之后的时间点。在图4中,这些计算出的饲料量值h1、h2、......hn用空心点表示。因此,喂食系统1考虑了消耗率的变化,使得喂食系统1可以在期望的时间(实际上)在饲料围栏31处输送后续饲料。
[0116]
在该具有自学习算法35b的示例性实施例中,控制系统35还假设饲料围栏31的饲料量呈指数下降到渐近值0。控制系统35确定饲料围栏31的预测的未来饲料量值何时下降到与剩余饲料量相对应的有效空值以下,即饲料量值h
res
。在未来饲料量值下降到有效空值h
res
以下的时间点,饲料围栏31实际上是空的,即饲料已经用尽,即使仍有少量剩余饲料。在图4中,饲料围栏31的未来耗尽时间用t2表示。
[0117]
代替预测未来耗尽时间t2(即饲料围栏31的饲料实际上用尽的时刻)或除此以外,控制系统35可以预测饲料围栏31的耗尽持续时间y(也参见图4)。耗尽持续时间y指示预测饲料围栏31的未来饲料量值hn下降到该饲料围栏31的饲料量的预设有效空值h
res
以下需要多长时间。耗尽持续时间y也可以基于存储在存储器35a中的饲料量值h-n
来确定,特别是通过使用函数拟合或自学习算法35b确定的饲料围栏31的消耗率来确定。控制系统35然后基于饲料围栏31的该耗尽持续时间y计算开始时间t1。为此目的,控制系统35可以直接将饲料围栏31的耗尽持续时间y与用于生产后续饲料并输送该饲料的时间间隔x进行比较。因此,没有必要在控制系统35中明确地确定未来耗尽时间t2。
[0118]
本发明不限于在附图中展示的示例性实施例。本领域技术人员可以在不脱离本发明范围的情况下进行多种修改。例如,自学习算法35b也可以被配置为基于存储在存储器中的测得的饲料量值来直接预测未来饲料量值。换句话说,在这种情况下,向自学习算法馈送实例,每个实例包括在测量时刻测得的与时间相关参数的关联值相结合的饲料量值作为输入、以及在该测量时刻之后测得的饲料量值作为输出。在向自学习算法提供了足够的实例之后,自学习算法能够基于最后测得的饲料量值和关联的时间相关参数来预测一个或多个未来饲料量值作为输出。另外,控制系统可以被配置为计算另一变量的值,比如表示直至需要开始装载后续饲料的后续开始命令为止的时段的变量。在这种情况下,可以分别将这种时段添加到存储在存储器中的每个测得的饲料量值中。换句话说,控制系统可以首先将测得的饲料量值转换成关联的时段,直至下一个开始命令为止。随后,控制系统可以基于该时段的转换值,在最后一次测量时刻之后的一个或多个时间点,在该喂食处或每个喂食处计算该时段的一个或多个值。在这种情况下,控制系统因此不必预测例如饲料量值,但是控制系统可以直接预测直至需要下一个开始命令为止的时段。根据本发明,控制系统还可以用另外的方式使用该变量的一个或多个计算值,以设置将后续饲料中的饲料输送到一个或多个喂食处的时间点。除此之外或代替地,控制系统可以例如根据计算的(多个)饲料量值向智能手机发送消息。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。