技术特征:
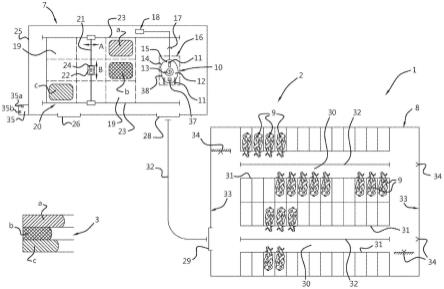
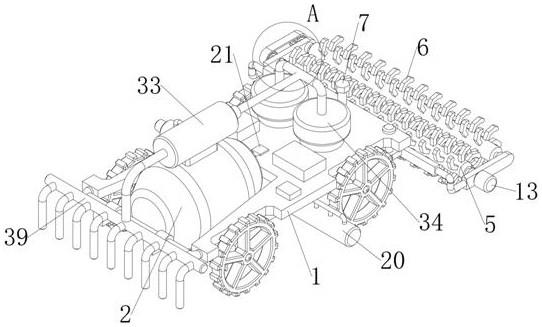
1.一种喂食系统,用于使用来自饲料供应源(7)的饲料在至少一个喂食处(31)喂食动物(9)、具体地是牛、比如奶牛或肉牛,其中,所述喂食系统(1)包括:-至少一个自主喂食装置(10),所述至少一个自主喂食装置包括容器(12),用于容纳来自所述饲料供应源(7)的饲料,其中,所述自主喂食装置(10)被配置为将装在所述容器(12)中的饲料运送到所述喂食处(31)并在所述喂食处(31)发放所述饲料,-饲料量测量装置(38),用于反复测量可用的供所述喂食处(31)的所述动物(9)消耗的饲料量的饲料量值,以及-控制系统(35),所述控制系统被配置为从所述饲料量测量装置(38)接收在不同测量时刻、在所述喂食处(31)测得的饲料量值,其特征在于,所述控制系统(35)被配置为执行以下操作:-将从所述饲料量测量装置(38)接收的多个饲料量值存储在存储器(35a)中,以及-基于存储在所述存储器(35a)中的多个饲料量值来确定变量(λ,h
n
)的至少一个值,所述变量表示至少在最后一次测量时刻和/或此时刻之后的所述饲料量值与时间之间的关系。2.如权利要求1所述的喂食系统,其中,所述控制系统(35)被配置为基于由所述控制系统(35)确定的所述变量(λ,h
n
)的值来产生饲料用尽信号,其中,具体地,所述饲料用尽信号与所述喂食处(31)的未来耗尽时间t2相关。3.如权利要求2所述的喂食系统,其中,所述未来耗尽时间t2对应的时间点为:根据由所述控制系统(35)确定的所述变量(λ,h
n
)的值所表示的饲料量值与时间之间的关系,所述饲料量值等于或下降到有效空值以下,所述有效空值对应于所述喂食处(31)的剩余饲料量。4.如权利要求2或3所述的喂食系统,其中,所述控制系统(35)被配置为基于所述饲料用尽信号、具体地是基于所述未来耗尽时间t2或直至所述耗尽时间t2为止的时段来控制所述喂食系统(1),以便在所述动物(9)基本上吃完所述喂食处(31)的饲料之前,由所述自主喂食装置(10)在所述喂食处(31)发放后续饲料。5.如前述权利要求中的一项或多项所述的喂食系统,其中,所述变量表示在所述最后一次测量时刻和/或此时刻之后的消耗率,以所述消耗率,可用的供所述喂食处的所述动物消耗的饲料量在所述喂食处减少。6.如前述权利要求中的一项或多项所述的喂食系统,其中,确定所述变量(λ,h
n
)的值包括:针对存储在所述存储器(35a)中的每个最后测得的饲料量值,基于存储在所述存储器(35a)中的多个饲料量值,通过函数拟合、具体地是“曲线拟合”分别确定所述饲料量值h随所述时间t变化的关联函数h(t)。7.如权利要求6所述的喂食系统,其中,所述饲料量值h随所述时间t变化的函数h(t)包括指数函数、具体地是a
λt
,其中,底数a优选地是数字e,并且其中,所述参数λ是表示至少在最后一次测量时刻和/或此时刻之后的所述饲料量值与时间之间的关系的变量,具体地是表示所述消耗率,并且t是所述时间,并且其中,所述控制系统(35)被配置为基于存储在所述存储器(35a)中的多个饲料量值,通过函数拟合、具体地是“曲线拟合”来计算所述指数函数中的参数λ的值。8.如权利要求6或7所述的喂食系统,其中,所述控制系统(35)被配置为通过求解方程
来计算所述函数h(t)中的时间t的值,所述方程是所述饲料量值随所述时间t变化的函数h(t)等于有效空值h
res
,所述有效空值对应于剩余饲料量(h(t)=h
res
),其中,所述时间t的计算值表示所述喂食处(31)的未来耗尽时间t2。9.如前述权利要求中的一项或多项所述的喂食系统,其中,所述控制系统(35)被配置为基于对存储在所述存储器(35a)中的饲料量值的时间相关性选择来确定所述变量(λ,h
n
)的值,其中,具体地,所述控制系统(35)被配置为根据一天当中的时间点来确定所述选择。10.根据前述权利要求中的一项或多项所述的喂食系统,其中,所述喂食系统(1)设置有饲料装载系统(20),用于将所述饲料从所述饲料供应源(7)装载到所述自主喂食装置(10)的容器(12)中,并且其中,所述控制系统(35)被配置为基于所述变量(λ,h
n
)的确定值来控制所述饲料装载系统(20)和/或所述自主喂食装置(10)装载后续饲料和/或将已装载的后续饲料运送到所述喂食处(31)。11.如权利要求10所述的喂食系统,其中,所述控制系统(35)被配置为基于所述变量(λ,h
n
)的确定值来确定开始装载后续饲料和/或将已装载的后续饲料运送到所述喂食处(31)的开始时间t1,其中,具体地,所述控制系统(35)被配置为在所述开始时间t1向所述饲料装载系统(20)发送开始装载所述后续饲料的开始命令,或向所述自主喂食装置(10)发送开始将已装载的饲料运送到所述喂食处(31)的开始命令。12.如权利要求11所述的喂食系统,其中,所述控制系统(35)被配置为通过从所述喂食处(31)的未来耗尽时间t2反推计算一个时间间隔x来确定所述开始时间t1,所述时间间隔具体地取决于装载所述后续饲料所需的装载时间和/或通过所述自主喂食装置(10)将装在所述容器中的饲料输送到所述喂食处(31)所需的输送时间。13.如前述权利要求中的一项或多项所述的喂食系统,其中,所述饲料量测量装置(38)装配在所述自主喂食装置(10)上,并且其中,所述饲料量测量装置(38)被配置为当所述自主喂食装置(10)经过所述喂食处(31)时测量所述喂食处(31)的饲料量值。14.如权利要求13所述的喂食系统,其中,所述自主喂食装置(10)的容器(12)包括用于从所述容器(12)发放饲料的发放装置(14),并且其中,所述自主喂食装置(10)设置有饲料推动装置,用于在与所述自主喂食装置(10)的行进方向成直角的方向上推动位于所述喂食处(31)的剩余饲料和由所述发放装置(14)发放的饲料,并且其中,相对于所述发放装置(14),所述饲料量测量装置(38)装配在所述自主喂食装置(10)上,以便使所述测得的饲料量值涉及被推动的饲料,包括所述剩余饲料和刚刚由所述发放装置(14)发放的饲料量。15.如前述权利要求中的一项或多项所述的喂食系统,其中,所述变量的值包括可用的供所述喂食处(31)的所述动物(9)消耗的饲料量的饲料量值。16.如前述权利要求中的一项或多项所述的喂食系统,其中,所述控制系统(1)包括自学习算法(35b),所述自学习算法被配置为接收存储在所述存储器中的饲料量值,并且其中,所述控制系统(35)被配置为使用所述自学习算法(35b)来计算所述变量的值。17.一种通过如前述权利要求中的一项或多项所述的喂食系统(1)来自动喂食动物(9)、具体地是牛的方法,其中,所述方法包括以下步骤:-反复测量已有的供所述喂食处(31)的所述动物(9)消耗的饲料量的饲料量值,-将在不同测量时刻在所述喂食处(31)测得的多个饲料量值存储在所述控制系统(35)的所述存储器(35a)中,
‑
基于存储在所述存储器中的多个饲料量值来确定变量(λ,h
n
)的至少一个值,所述变量表示至少在最后一次测量时刻和/或此时刻之后的所述饲料量值与时间之间的关系。
技术总结
一种喂食系统,用于使用来自饲料供应源(7)的饲料在至少一个喂食处(31)喂食动物(9)、具体地是牛、比如奶牛或肉牛,其中,喂食系统(1)包括:至少一个自主喂食装置(10),该至少一个自主喂食装置包括容器(12),用于容纳来自饲料供应源(7)的饲料,其中,自主喂食装置(10)被配置为将装在容器(12)中的饲料运送到喂食处(31)并在所述喂食处(31)发放该饲料;饲料量测量装置(38),用于反复测量可用的供喂食处(31)的动物(9)消耗的饲料量的饲料量值;以及控制系统(35),该控制系统被配置为从饲料量测量装置(38)接收在不同测量时刻在喂食处(31)测得的饲料量值,其中,控制系统(35)被配置为执行以下操作:将从饲料量测量装置(38)接收的多个饲料量值存储在存储器(35a)中,基于存储在存储器(35a)中的多个饲料量值来确定变量(X,hn)的至少一个值,该变量表示至少在最后一次测量时刻和/或此时刻之后的饲料量值与时间之间的关系。关系。关系。
技术研发人员:费兰蒂 L
受保护的技术使用者:莱利专利股份有限公司
技术研发日:2020.12.15
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。