1.本发明属于水下目标探测技术领域,特别涉及一种基于光谱数据和红外温度数据融合的尾迹识别方法。
背景技术:
2.水下目标探测根据其检测的信号源可以分为两类:直接探测和间接探测。声呐探测一直以来是最有效的直接探测手段,但随着水下目标降噪技术的不断发展,极大地增加了声纳探测的难度。非声探测手段应运而生,这种方法使用灵活,拥有与航空载机平台性能相关的动态探测能力,因而具有广阔的应用前景。非声的直接探测手段主要是通过检测水下目标本身的红外特征、光学特征、雷达特征和磁场特征,探测发现水下目标,利用红外成像技术进行尾流探测,已成为世界上重点发展的一项侦察技术。
3.水下目标高温冷却水排放入海使航行区域呈现“热尾流”特性,热尾流成为暴露水下目标位置、航向等重要信息的重要因素。目前红外探测系统的最低温度分辨率可以达到0.001℃,足以探测到海面异常的温度,获取或判断导航信息,识别水下目标的位置、速度和方向。
4.水下目标冷却水的排放使周围海水迅速升温,由于温度升高,密度相对减小,在扩散的过程中会逐渐向上浮升。若距离较近,会随时间浮升到自由水表面,由于海面恢复到原态需要较长时间,因此,水下目标运动过的海域由于热尾迹的存在会在海表面形成热尾迹。当热尾迹浮升不受任何抑制时,海表会形成大面积热尾迹,其特征原则上会被探测到。通过利用热尾迹目标和海洋背景的温差,可以实现水下航行器的红外探测。
5.水下目标运动过程中,海水冷却核装置排放出大量的温热尾迹,这些轨迹的特征与海水的性质相关。水下目标扰动温度密度分层,海水浮升形成冷尾迹温差信号,与温度密度均匀海水相比,海表温变区域显著增大、尾迹温差由6.13mk增大到 84 mk,可以通过海表上游冷尾迹特征判断是否存在水下目标。红外图像是通过“测量”物体向外辐射的热量而获得的,虽然可以探测到海洋背景与尾迹的温度差异,但是具有分辨率差、信噪比低、视觉效果模糊等缺点,因而,影响了水下目标尾迹的探测效率以及识别精度。
技术实现要素:
6.本发明的目的在于提出一种基于光谱数据和红外温度数据融合的尾迹识别方法,在利用红外数据识别尾流的基础上同时综合了光谱数据,通过对光谱数据以及红外温度数据的处理与对比,利于提高水下目标的探测与识别准确度。
7.本发明为了实现上述目的,采用如下技术方案:基于光谱数据和红外温度数据融合的尾迹识别方法,包括如下步骤:步骤1. 基于已采集的尾迹红外温度数据样本,用红外热像仪获得的基于时间序列的原始红外图像提取尾迹目标温度数据,进一步得到尾迹红外位置信息数据;步骤2. 基于已采集的尾迹光谱数据样本,用光谱仪采集的光谱数据进行处理,得
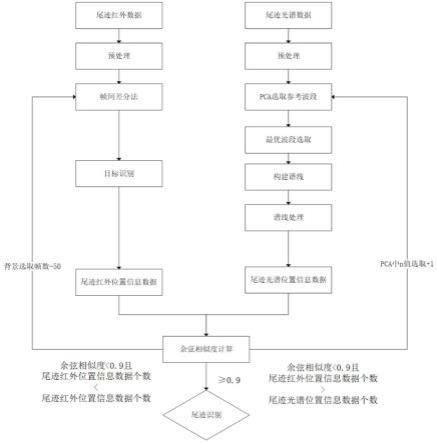
到尾迹光谱位置信息数据;步骤3. 将步骤1得到的尾迹红外位置信息数据与步骤2得到的尾迹光谱位置信息数据进行余弦相似度计算,进而得到它们之间的匹配度;判断步骤3得到的匹配度值与预设匹配度阈值的大小关系,若该匹配度值小于预设匹配度阈值,则转到步骤4;若该匹配度值大于或等于预设匹配度阈值,则转到步骤5;步骤4. 比较尾迹红外位置信息数据与尾迹光谱位置信息数据的数量;经过比较,若尾迹红外位置信息数据的数量小于尾迹光谱位置信息数据的数量,则需要进一步改进步骤1中红外图像处理方法的帧间差分法的背景选取;经过比较,若尾迹红外位置信息数据的数量大于或等于尾迹光谱位置信息数据的数量,则需要进一步改进步骤2中光谱数据处理方法的主成分分析n值选取;参数调节完成后,并重复执行上述步骤1至步骤3;步骤5. 判定为此目标区域为尾迹目标区域;此时,面向尾迹识别的光谱数据处理方法以及红外图像处理方法融合效果达到最优;步骤6. 利用融合后的红外图像处理方法以及光谱数据处理方法,对目标尾迹进行识别。
8.本发明具有如下优点:如上所述,本发明述及了一种基于光谱数据和红外温度数据融合的尾迹识别方法,该尾迹识别方法通过红外相机输出基于时间序列的红外图像温度数据对尾迹进行目标识别,通过红外光谱传感器获取长波红外波段的光谱数据,可以反演出海水的发射率,进行谱段选择和特征变换;本发明通过融合时间序列、空间维度的红外数据和光谱数据,能够使得海洋背景与尾迹之间的差别加大,进而提高水下目标尾迹的识别效率及精度。
附图说明
9.图1为本发明实施例中基于光谱和红外温度数据融合识别水下目标尾迹的方法的流程图。
10.图2为本发明实施例中利用红外热像仪采集的原始红外图像示意图。
11.图3为本发明实施例中红外背景图像示意图。
12.图4为本发明实施例中红外图像帧间差分后结果示意图。
13.图5为本发明实施例中红外图像阈值分割结果示意图。
14.图6为本发明实施例中利用光谱仪采集一个像元的光谱数据示意图。
15.图7为本发明实施例中利用光谱仪采集多个像元不同波段数据示意图。
具体实施方式
16.下面结合附图以及具体实施方式对本发明作进一步详细说明:如图1所示,基于光谱数据和红外温度数据融合的尾迹识别方法,包括如下步骤:步骤1. 基于已采集的尾迹红外温度数据样本,用红外热像仪获得的基于时间序列的原始红外图像提取尾迹目标温度数据,进一步得到尾迹红外位置信息数据。
17.该步骤1具体为:步骤1.1. 用红外热像仪采集基于时间序列的原始红外图像温度数据fi(x,y);其
中,i表示第i帧图像,第i帧图像的大小为m
×
n,(x,y)表示尾迹红外位置信息。
18.步骤1.2. 用小波降噪方法对步骤1.1得到的基于时间序列的原始红外图像温度数据fi(x,y)进行预处理,得到处理后的红外图像温度数据fi(x,y)。
19.步骤1.3. 将步骤1.2中经过降噪处理后的红外图像温度数据fi(x,y),进行背景选取,得到背景数据fk(x,y) ,即第k帧红外图像温度数据。
20.将步骤1.2中经过降噪处理后的红外图像温度数据fi(x,y)与步骤1.3中的背景数据fk(x,y)相减,突出尾迹目标信息,得到红外图像d(x,y)。
21.步骤1.3中,将降噪处理后的红外图像温度数据fi(x,y)进行帧间差分法,得到红外图像d(x,y),帧间差分法包括以下步骤:选取基于时间序列的第k帧红外图像作为背景数据fk(x,y);选取基于时间序列的第i帧红外图像作为尾迹检测的红外图像温度数据fi(x,y)。
22.帧间差分法的公式如下:当| fk(x,y)
‑ꢀfi
(x,y)|>t时,d(x,y)=1,否则,d(x,y)=0,阈值t由阈值分割法确定。
23.步骤1.4. 根据红外图像d(x,y)识别尾迹,提取出包含尾迹信息的二值图像d(x,y)即矩阵d,得到尾迹红外位置信息数据{(x1,y1) ,(x2 ,y2) ,
…
,(xd ,yd)}。
24.其中,(x1,y1)、(x2 ,y2) ,
…
, (xd ,yd)分别表示第1,2,
…
,d个尾迹红外位置信息。
25.步骤2. 基于已采集的尾迹光谱数据样本,用光谱仪采集的光谱数据进行处理,得到尾迹光谱位置信息数据。该步骤2具体为:步骤2.1. 用光谱仪采集的光谱数据x是一个 p 维随机变量。
26.x=( x1,x2,
…
, xn) =( x1, x2,
…
, x
p
)
t
;其中, n 是光谱数据的像元数目, p是波段数目,xi表示光谱数据的第i个像元,i=1, 2,
…
, n, xk表示图像的第 k 个波段,k=1, 2,
…
, p。
27.步骤2.2. 将光谱数据x进行预处理,使用savitzky-golay卷积平滑滤波, 提高光谱的平滑性,并降低噪声干扰,公式如下:。
28.其中,为savitzky-golay卷积平滑滤波所得结果;表示k点处经平滑的光谱值,w表示滤波窗口宽度,x
k i
表示第k i段波段光谱数据。
29.步骤2.3. 通过主成分分析法分析光谱数据特征贡献率,通过对贡献率的排序选取前n个主成分作为参考波段;主成分分析法包括以下步骤:步骤2.3.1. 计算数据协方差矩阵,并获得协方差矩阵∑x的特征值。其中,λ1,λ2,
…
,λ
p
为协方差矩阵∑x的特征值,且λ1≥λ2≥
…
≥λ
p
≥0。
30.定义m表示x 的均值向量,m=∑
ni=1
xi/n。
31.其中,xi表示第i个像元的光谱数据,∑x表示协方差矩阵;∑x =e{(x-m) (x-m)
t
}。
32.步骤2.3.2. 将对应的特征值按照大小排序,最大的特征值是第一主成分,第二大的特征值是第二主成分,vn为选取前n个主成分作为参考波段。
33.y=( y1, y2,
ꢀ…
, y
p
)
t
=ax;a=( t1, t2,
ꢀ…
, t
p
);vn=∑
ni=1
λi/∑
pi=1
λi。
34.其中,a表示主成分变换矩阵,y1, y2,
ꢀ…
, y
p 表示x的第1主成分,第2主成分,
…
,
第p主成分,t1, t2,
ꢀ…
, t
p
为特征值λ1,λ2,
ꢀ…
,λ
p
对应的单位特征向量。
35.步骤2.4. 设δ
i1
是∑x对角线上的值, 根据ρ(yk,xi)计算主成分yk与原来第i个波段 xi的相关系数,vi是进行波段选择的主要依据,选择最大vi值对应的波段作为最优波段。
36.ρ(yk,xi)= t
ik
/ k,i=1,2,
…
,p;vi=∑
mk=1
ρ2(yk,xi)= ∑
mk=1
λkt
2ik
/δ
i1
。
37.其中,λk表示∑x的特征值,t
ik
表示单位特征向量ti第k个值。
38.步骤2.5. 基于步骤2.4得到的最优波段的光谱数据构建光谱曲线。
39.步骤2.6. 在步骤2.5构建的光谱曲线中基于统计的方法识别与全局背景光谱存在较大差异的像元,提取尾迹光谱位置信息数据{(x1’,y1’) ,(x2
’ꢀ
,y2’),
…
,(xd’,yd’)};其中,(x1’,y1’)、(x2
’ꢀ
,y2’) ,
…
, (xd
’ꢀ
,yd’)分别表示第1,2,
…
,d个尾迹光谱位置信息。
40.步骤3. 将步骤1得到的尾迹红外位置信息数据与步骤2得到的尾迹光谱位置信息数据进行余弦相似度计算,进而得到它们之间的匹配度。
41.判断经过计算得到的匹配度值与预设匹配度阈值的大小关系,若匹配度值小于预设匹配度阈值,则转到步骤4;若匹配度值大于或等于预设匹配度阈值,则转到步骤5。
42.本实施例中预设匹配度阈值例如设定为0.9,当然,该值只是示例性的,例如还可以根据需要,将预设匹配度阈值设定为0.85、0.95等值。
43.该步骤3具体为:步骤3.1. 将提取的尾迹光谱位置信息数据,构成一个大小为m
×
n的矩阵,其中,尾迹位置信息置1,其他位置置0,构成一个光谱位置矩阵g。
44.步骤3.2. 将光谱位置矩阵g与红外位置矩阵d进行余弦相似度计算。
45.将光谱位置矩阵g表示为向量g=(g1,g2,
…
,gd),将红外位置矩阵d表示为向量d=(d1,d2,
…
,dd),则光谱位置矩阵g和红外位置矩阵d的余弦相似度为:;其中,g1=(x1’,y1’),g2=(x2’,y2’) ,
…
,gd= (xd’,yd’)。
46.d1=(x1 ,y1),d1=(x2 ,y2),
…
,dd=(xd ,yd)。
47.如果两个矩阵的余弦相似度,即匹配度值大于或等于预设匹配度阈值,则判定尾迹识别成功,此时面向尾迹识别的光谱数据处理方法以及红外图像处理方法融合效果达到最优。
48.步骤4. 比较尾迹红外位置信息数据与尾迹光谱位置信息数据的数量。
49.经过比较,若尾迹红外位置信息数据的数量小于尾迹光谱位置信息数据的数量,则需要进一步改进步骤1中红外图像处理方法的帧间差分法的背景选取。
50.改进帧间差分法第k帧背景的选取,每次参数调整在选取背景帧数k值基础上减50。
51.经过比较,若尾迹红外位置信息数据的数量大于或等于尾迹光谱位置信息数据的数量,则需要进一步改进步骤2中光谱数据处理方法的主成分分析n值选取。
52.每次参数调整在n值基础上加1,重新进行计算参考波段选取以及最优波段选取。
53.参数调节完成后,重复执行上述步骤1至步骤3;通过不断地调节参数,使得面向尾
迹识别的光谱数据处理方法以及红外图像处理方法融合效果达到最优。
54.步骤5. 判定为此目标区域为尾迹目标区域;此时,面向尾迹识别的光谱数据处理方法以及红外图像处理方法融合效果达到最优,进而精确、实时识别尾迹。
55.步骤6. 利用融合后的红外图像处理方法以及光谱数据处理方法,对目标尾迹进行识别。
56.该步骤6具体为:利用参数调整好的红外图像处理方法和光谱数据处理方法,分别获取尾迹红外位置信息数据g’和尾迹光谱位置信息数据d’。
57.将数据g’和d’合并,组成一张尾迹位置信息二值化图片,得到尾迹识别结果。
58.下面根据本发明方法工作流程,对尾迹进行目标识别,如图2至图7所示。
59.用红外热像仪进行数据收集,图2为依据红外热像仪采集温度数据显示的原始红外图像,将原始红外图像进行预处理,采用小波降噪后得到的图像,用帧间差分法对红外原始温度数据进行处理,减去图3背景图,得到图4的结果。由图4中的结果看出,尾迹目标得以明显凸显。将帧间差分法处理后的图像采用otsu算法进行阈值分割,如图5所示,可以凸显尾迹目标,根据阈值分割后的二值化图像可进一步得到尾迹红外位置信息数据。
60.在红外热像仪采集尾迹红外温度数据的同时,用光谱仪进行光谱数据采集,得到三维的光谱数据,将光谱数据采用savitzky-golay卷积平滑滤波进行预处理,去除噪声等影响因素。采用主成分分析选取n个参考波段,如图6所示,将所有波段与参考波段对比,得出包含大部分参考波段信息的最优波段,如图7所示,选取了最优波段并构建光谱曲线。用统计学方法对选取的谱线进行处理,分析出相对于海面背景异常的区域,提取该目标像元的光谱特征。
61.将红外位置信息数据与光谱位置信息数据进行余弦相似度计算,若余弦相似度大于或等于0.9,将红外位置信息矩阵和光谱位置信息矩阵合并,此时识别的目标区域即为尾迹区域,此时,面向尾迹识别的光谱数据处理方法以及红外图像处理方法融合效果达到最优。若余弦相似度小于0.9,则通过不断调整参数,使得上述两种方法融合效果达到最优。
62.当然,以上说明仅仅为本发明的较佳实施例,本发明并不限于列举上述实施例,应当说明的是,任何熟悉本领域的技术人员在本说明书的教导下,所做出的所有等同替代、明显变形形式,均落在本说明书的实质范围之内,理应受到本发明的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
