1.本发明涉及仿生鱼技术领域,具体涉及一种仿鲹科可升潜的仿生鱼机构。
背景技术:
2.目前以舵机作为驱动机构的仿生鱼设计中,大多工作原理为将bcf模式的鱼体运动部分简化拆分为一定数目的关节,以舵机作为各关节驱动件,当关节数目越多,运动控制可越接近真实鱼体的运动方式,同时机构体积也会增加,机构复杂度也越高。其中很多设计存在一定的缺陷。以小型仿生鱼设计为例,如参考文献[1](高心悦.一种仿生机器鱼设计与控制的研究[d].北京邮电大学,2017.)中设计的仿生鱼机构,驱动器采用单轴舵机,与支撑机架配合的机构在运动过程中可能会出现非鱼体游动方向上的扭矩,且设计仅处在运动机构设计阶段,无法投入使用及商品化。参考文献[2](李志成.仿生机器鱼建模与软硬件实现的研究[d].哈尔滨工业大学,2009.)中设计的仿生鱼机构,运动部分约占整体的65%,运动偏向鳗鲡式鱼运动模式,相较于鲹科鱼运动模式游速较低,且不具备升浅能力,外形趋近于矩形,流体力学角度上游动效率偏低。
[0003]
中国专利(申请号cn201410358254.0,一种智能观赏仿生鱼及其控制方法[发明])中设计的仿生鱼,胸鳍机构采用两个舵机控制,运动过程中舵机输出可能会出现偏差导致两胸鳍运动不一致;舵机支撑架选用已有的标件固定架,使得各关节尺寸固定,与真实鱼体简化后的关节尺寸有一定偏差,且该机构中采用二关节式机构,相较之下,三关节式机构更贴合鱼体波运动学曲线;外壳采用刚性椭圆骨架做支撑,柔性鱼皮包裹做外壳,此种方式抗冲击性较差,会导致机体内部易进水;且此类机构的仿生鱼很多难以做到调节鱼体密度及降低鱼体重心,对此解决方案该说明书中并未做出说明;其中鱼胸鳍的表面积较鱼体体积来说设计较小,导致升浅能力较弱,鱼尾设计感较弱;作为观赏性仿生鱼为目的的设计,外形上缺乏一定的美观性,同样从流体力学的角度上外型存在一定缺陷。
[0004]
参考文献[3](冯畅.仿鲹科三关节可升潜机器鱼设计与研制[d].南京理工大学,2016.)中设计的仿生鱼运动部分设计与上一种较为相似,也采用适配的u型杆来固定舵机,外壳采用刚性椭圆骨架做支撑,柔性鱼皮包裹做外壳。调节鱼体密度及降低鱼体重心的具体实施方案为机器下水后用铅条贴附在鱼皮表面进行动态调整,后拆开鱼体,将铅条置于鱼皮内部,具体操作方法较为复杂。且此类设计方式会导致内部体积较大,使得需要的配重质量也越大。该设计最后的实物中,以阉割了椭球型外壳为代价,降低了鱼体总体积及质量,从流体力学的角度分析,同时也降低了仿生鱼的游动效率。另外此仿生鱼升浅机构为利用舵机改变重物位置以调整鱼体重心,通过使鱼头发生浮沉以改变鱼体在竖直方向的前进方向。由于重物位置改变范围较小,会导致该仿生鱼机构浮沉效果不会很明显。且要实现此机构需要发明者进行多次计算,以对该机构进行位置和重量等因素的调整,后期还需要在水中实验时也进行相应调整。并且由于此机构设计具有与各机构数据很高的关联性,会导致后续如果需要修改或拓展仿生鱼功能时遇到很多阻碍,以至于需要重新设计机构。
技术实现要素:
[0005]
为了克服上述现有技术的缺点,本发明的目的在于提供了一种仿鲹科可升潜的仿生鱼机构,具备在水中前进转向、升潜、急停、自平衡的能力;且造型美观,体积小巧,适配性强,机构精简一体化;同时还具备充足拓展能力,即可加入机器视觉、红外线传感、水质检测等功能。
[0006]
为了达到上述目的,本发明采取的技术方案为:
[0007]
一种仿鲹科可升潜的仿生鱼机构,包括依次连接的头部控制部分、运动关节部分和鱼尾部分;
[0008]
头部控制部分包括头部空舱1、头部硬件舱2、头部配重舱3;头部硬件舱2上部连接头部空舱1,头部硬件舱2下部连接头部配重舱3;头部硬件舱2安装有鱼鳍传动轴9,鱼鳍传动轴9的动力输入和单轴舵机12的输出连接,单轴舵机12固定在头部硬件舱2上;鱼鳍传动轴9的两端和第一鱼胸鳍10、第二鱼胸鳍11连接;
[0009]
运动关节部分包括第一双轴舵机13、第二双轴舵机14、第三双轴舵机15以及一关节外壳4、二关节外壳5、三关节外壳6;头部硬件舱2后端通过第一双轴舵机13和一关节外壳4前端连接,一关节外壳4后端通过第二双轴舵机14和二关节外壳5前端连接,二关节外壳5后端通过第三双轴舵机15和三关节外壳6前端连接;
[0010]
鱼尾部分包括鱼尾7,三关节外壳6后端通过鱼尾销8和鱼尾7前端连接。
[0011]
所述的头部硬件舱2连接的单轴舵机12输出轴与锥齿轮舵盘16连接,锥齿轮舵盘16与套轴锥齿轮23啮合,实现直角传动;套轴锥齿轮23与鱼胸鳍传动轴9大端面连接,鱼胸鳍传动轴9两端均依次装配双球轴承、水封、垫圈后与头部硬件舱2的孔槽进行装配,鱼胸鳍传动轴9伸出头部硬件舱2两端分别与第一鱼胸鳍10、第二鱼胸鳍11进行过度配合,且第一鱼胸鳍10、第二鱼胸鳍11在装配时保持在同一水平面上,实现当单轴舵机12输出轴转动时,第一鱼胸鳍10、第二鱼胸鳍11在鱼胸鳍传动轴9的轴线方向上绕轴转动。
[0012]
所述的头部空舱1用于密封头部硬件舱2,头部空舱1与头部硬件舱2的连接端面涂抹一层防水油脂,后进行连接。
[0013]
所述的头部硬件舱2用于放置pcb板、电池、天线等元器件以控制驱动部件运动。
[0014]
所述的头部配重舱3使用栅格化设计,根据需求在不同槽内按不同比例装填重物,来整体调节仿生鱼整体密度及重心位置,从而实现鱼体平衡。
[0015]
所述的头部配重舱3在填充重物后,与头部硬件舱2的连接端面涂抹一层防水油脂,再进行连接。
[0016]
双轴舵机采用防水舵机或是进行防水处理;每一个双轴舵机的输出轴两端分别与尺寸相同的两圆形舵盘连接,上、下方的圆形舵盘上在两个对角的定位孔与相应关节外壳的前端上、下水平面的定位孔通过螺钉进行固定。
[0017]
关节外壳承担了作为驱动元件固定支架以及机体外壳的作用,其内部采用部分抽壳处理,根据鱼体运动执行部分各零件的体积密度及所处位置,经过计算后设计出内部结构,使得鱼体具有在水中保持水平,重心靠下,以及整体密度接近且略大于水密度,实现支撑件与外壳一体化设计。
[0018]
所述的鱼尾7前端水平端面上的孔和三关节外壳6后端伸出轴进行过度配合,并利用鱼尾销8进行固定;鱼尾7采用软胶柔性材料制作。
[0019]
所述的仿鲹科可升潜的仿生鱼机构外形以脂鲤科的梅塔蓝线灯鱼、彩虹魔鬼灯鱼或锦鲤为原型设计,整体成纺锤形。
[0020]
本发明的有益效果是:
[0021]
1)本发明机构外形以脂鲤科的梅塔蓝线灯鱼,彩虹魔鬼灯鱼及锦鲤为原型设计,整体成纺锤形。流线型的仿鱼体外观不仅具有观赏性,从流体力学的角度上分析,还能够极大的减缓水中受到的摩擦阻力。同时更扁平化的鱼身能够减少鱼体正面冲击水流的表面积,也能够增加鱼体在摆动时的击水面积,进而提高了其游动效率。
[0022]
2)在保持外观造型,且保证机构强度的基础下,设计机体为适配双轴舵机的最小尺寸,小巧纤细的鱼体可在较复杂或狭小的环境中运行,拥有很强的环境适配性。该仿生鱼刚体部分总长度可达到386mm,算上柔性尾鳍总长可达到464mm,鱼体横向宽度在80mm,总重量可控制在1000g以内。
[0023]
3)运动关节部分采用外壳与舵机支撑件一体化设计的关节外壳,相较于柔性材料的鱼皮包裹,鱼体的耐冲击性更强,强度更高。关节外壳尺寸相较于舵机常用适配的固定尺寸的u型杆,更贴合真实鱼体简化后的关节尺寸,以助于更真实得模拟鱼体游动,关节运动曲线与鱼体波曲线更贴合,以提高鱼体游动效率。并且关节外壳设计中,内部采用部分抽壳处理,根据鱼体运动执行部分各零件的体积密度,及所处位置,经过精密计算后,设计出合理的内部结构,使得鱼体具有在水中保持水平,重心靠下,以及整体密度接近且略大于水密度。使得在具体投入使用中无需在进行配重调整。使得该仿生鱼总零件数较少,装配工序较为简化,即便非专业人士也能够快速安装。且关节机构留有的余量适宜安装市面上绝大多数常见的小型双轴舵机,便于使用者在更换硬件时执着于固定型号。(市面上常用的最小双轴舵机机箱尺寸大概在40*20*20mm左右)
[0024]
5)仿生鱼的头部控制部分分为了三层设计,分别为头部空舱,头部硬件舱,头部配重舱,使得各部分功能能能够很好地分离开。头部空舱与头部硬件舱配合,形成与外部水体隔绝的控制舱。控制舱的预留空间尺寸可完全满足放置需实现功能所用到的电路板(开发板,功能模块板),电池,摄像头等器件,使得仿生鱼具备很强的开发空间。其中的头部配重舱的配重槽采用栅格化设计,使用者能够很好的根据自己的需要来调配仿生鱼头部控制部分的密度及重心位置。为仿生鱼后续的功能升级拓展提供了保障。
[0025]
6)将鱼体摆动简化为三个关节的摆动,摆动通过双轴舵机作为驱动装置,驱动关节外壳摆动的同时,避免了非游动方向上扭矩的出现。通过控制各关节不同的转动角度进行摆动,以模拟真实鱼类的躯干摆动情况。
[0026]
7)模拟了飞机快速上升下降的原理,通过单轴舵机及机械机构实现鱼胸鳍的转动,使得鱼胸鳍与水流形成攻角,产生垂直于鱼体方向上的力,从而实现鱼体的快速上升下潜;同理,当鱼鳍面与水流相垂直时,受到最大水流阻力,以缩短鱼体停止运动后因惯性导致的位移量,从而实现鱼体的急停功能。且由于有头部配重舱进行动态调整,相较于改变重心法,不需要进行过多的调整,并且鱼体能够始终保持趋近水平,以减少不稳定因素。
[0027]
8)鱼体的自平衡能力利用了“不倒翁”的原理,通过“上轻下沉”的密度分配比,实现鱼体水平方向上的平衡,通过精细的密度计算,设计使得机构的重心尽可能的下移,从而具备优良的平衡性。
附图说明
[0028]
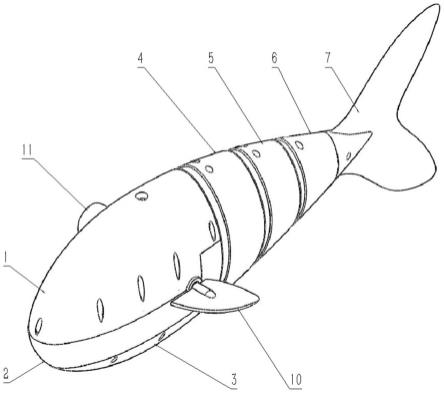
图1是本发明的立体示意图。
[0029]
图2是本发明的主视图。
[0030]
图3是图2水平方向的剖视图。
[0031]
图4是本发明的俯视图。
[0032]
图5是图4水平方向的剖视图。
[0033]
图6是本发明鱼胸鳍传动机构部分的示意图。
[0034]
图7是本发明头部控制部分的爆炸示意图。
[0035]
图8是本发明运动关节部分的爆炸示意图
[0036]
图9是本发明三关节外壳及鱼尾部分的爆炸示意图。
具体实施方式
[0037]
下面参照附图和实施例对本发明做详细描述。
[0038]
参照图1、图2、图3和图4,一种仿鲹科可升潜的仿生鱼机构,包括依次连接的头部控制部分、运动关节部分和鱼尾部分;
[0039]
头部控制部分包括头部空舱1、头部硬件舱2、头部配重舱3;头部硬件舱2上部连接头部空舱1,头部硬件舱2下部连接头部配重舱3;头部硬件舱2安装有鱼鳍传动轴9,鱼鳍传动轴9的动力输入和单轴舵机12的输出连接,单轴舵机12固定在头部硬件舱2上;鱼鳍传动轴9的两端和第一鱼胸鳍10、第二鱼胸鳍11连接;
[0040]
运动关节部分包括第一双轴舵机13、第二双轴舵机14、第三双轴舵机15以及一关节外壳4、二关节外壳5、三关节外壳6;头部硬件舱2后端通过第一双轴舵机13和一关节外壳4前端连接,一关节外壳4后端通过第二双轴舵机14和二关节外壳5前端连接,二关节外壳5后端通过第三双轴舵机15和三关节外壳6前端连接;
[0041]
鱼尾部分包括鱼尾7,三关节外壳6后端通过鱼尾销8和鱼尾7前端连接。
[0042]
参照图5、图6、图7,所述的头部配重舱3使用栅格化设计,根据需求在不同槽内按不同比例装填重物(如铁砂),来整体调节仿生鱼整体密度及重心位置,从而实现鱼体平衡;头部配重舱3在填充重物后,与头部硬件舱2的连接端面涂抹一层防水油脂,后通过螺钉进行连接;头部硬件舱2用于放置pcb板、电池、天线等元器件以控制驱动部件运动;头部硬件舱2通过螺钉螺母固定连接有单轴舵机12,单轴舵机12输出轴与锥齿轮舵盘16通过花键连接,通过锥齿轮舵盘16带动转动;锥齿轮舵盘16与套轴锥齿轮23啮合,实现直角传动;套轴锥齿轮23与鱼胸鳍传动轴9大端面进行焊接配合,以带动鱼胸鳍传动轴9转动;鱼胸鳍传动轴9两端均依次装配第一双球轴承24、第二双球轴承25;第一水封26、第二水封27;第一垫圈28、第二垫圈29后与头部硬件舱2的孔槽进行装配,水封作为动密封以防止鱼胸鳍传动轴9在转动时水流入头部硬件舱2,并在双球轴承与水封之间加入防水油脂以进一步提升防水性能;装配好后,鱼胸鳍传动轴9伸出头部硬件舱2两端分别与第一鱼胸鳍10、第二鱼胸鳍11进行过度配合,且第一鱼胸鳍10、第二鱼胸鳍11在装配时保持在同一水平面上,从而实现当单轴舵机12输出轴转动时,第一鱼胸鳍10、第二鱼胸鳍11在鱼胸鳍传动轴9的轴线方向上绕轴转动;头部硬件舱2通过定位孔与头部空舱1配合,并通过螺钉连接;头部空舱1用于密封头部硬件舱2,以防止外部水体流入,由于内部以空气为介质与头部配重舱3内的重物相配
合,以维持鱼体平衡及重心下移,并提供了放置器件的空间和伸出导线及天线的预留孔;头部空舱1与头部硬件舱2的连接端面涂抹一层防水油脂,后通过螺钉进行连接。
[0043]
参照图8,由三个双轴舵机(第一双轴舵机13、第二双轴舵机14、第三双轴舵机15)作为驱动元件,双轴舵机可采用防水舵机或是进行防水处理(具体为输出轴及减速齿轮组部分涂抹上防水油脂,所有的接缝及缝隙处打上防水胶);第一双轴舵机13与头部硬件舱2的舵机槽配合,通过螺钉进行连接;第一双轴舵机13的输出轴两端分别用尺寸相同的两圆形舵盘(第一圆形舵盘17、第二圆形舵盘18)进行花键连接,第一圆形舵盘17上在两个对角的定位孔与一关节外壳4的前端上水平面的定位孔通过螺钉进行固定,第二圆形舵盘18配合方式同理,其定位孔与一关节外壳4的前端下水平面的定位孔通过螺钉进行固定;一关节外壳4后端水平面上的定位孔与第二双轴舵机14机箱上的定位孔通过螺钉进行连接,第二双轴舵机14的输出轴两端分别用尺寸相同的两圆形舵盘(第三圆形舵盘19、第四圆形舵盘20)进行花键连接,第三圆形舵盘19上在两个对角的定位孔与二关节外壳5的前端上水平面的定位孔通过螺钉进行固定,第四圆形舵盘20配合方式同理,其定位孔与二关节外壳5的前端下水平面的定位孔通过螺钉进行固定;二关节外壳5后端水平面上的定位孔与第三双轴舵机15机箱上的定位孔通过螺钉进行连接,第三双轴舵机15的输出轴两端分别用尺寸相同的两圆形舵盘(第五圆形舵盘21、第六圆形舵盘22)进行花键连接,第五圆形舵盘21上在两个对角的定位孔与三关节外壳6的前端上水平面的定位孔通过螺钉进行固定,圆形舵盘22配合方式同理,其定位孔与三关节外壳6的前端下水平面的定位孔通过螺钉进行固定。
[0044]
一关节外壳4、二关节外壳5、三关节外壳6承担了作为驱动元件固定支架以及机体外壳的作用,其内部采用部分抽壳处理,根据鱼体运动执行部分各零件的体积密度及所处位置,经过计算后设计出内部结构,使得鱼体具有在水中保持水平,重心靠下,以及整体密度接近且略大于水密度,实现支撑件与外壳一体化设计。
[0045]
参照图9,所述的鱼尾7前端水平端面上的孔和三关节外壳6后端伸出轴进行过度配合,并利用鱼尾销8进行固定;鱼尾7采用软胶柔性材料制作,使得仿真鱼运动时更加拟合真实鱼类的游动方式。
[0046]
所述的仿鲹科可升潜的仿生鱼机构外形以脂鲤科的梅塔蓝线灯鱼、彩虹魔鬼灯鱼或锦鲤为原型设计,整体成纺锤形。
[0047]
本发明的工作原理为:
[0048]
1)前进及转向:由头部硬件舱2中的pcb板控制芯片同时向三个双轴舵机(第一双轴舵机13、第二双轴舵机14、第三双轴舵机15)发送给定的pwm信号以实现对各双轴舵机输出轴转角的不同控制。
[0049]
执行前进命令时,三个双轴舵机(第一双轴舵机13、第二双轴舵机14、第三双轴舵机15)从“0位”(鱼体各部分处在同一基准线)同时向一个方向摆动不同角度8
°
、10
°
、12
°
,第一双轴舵机13输出轴带动两圆形舵盘(第一圆形舵盘17、第二圆形舵盘18)向指定角度旋转8
°
,从而带动一关节外壳4向指定角度旋转8
°
;同一时间内,第二个双轴舵机14在一关节外壳4已改变的坐标系基础上再输出一旋转角度10
°
,使得与第二个双轴舵机14输出轴带动两圆形舵盘(第三圆形舵盘19、第四圆形舵盘20)向指定角度旋转10
°
,从而带动二关节外壳5向指定角度旋转10
°
;三关节外壳6运动同理,同一时间内,第三个双轴舵机15在二关节外壳5已改变的坐标系基础上再输出一旋转角度12
°
,使得与第三个双轴舵机15输出轴带动两圆
形舵盘(第五圆形舵盘21、第六圆形舵盘22)向指定角度旋转12
°
,从而带动三关节外壳6向指定角度旋转12
°
;当第三个双轴舵机15输出轴完成旋转12
°
后,三关节外壳6完成摆动到达限;再以“0位”基准线为对称轴,控制三个双轴舵机(第一双轴舵机13、第二双轴舵机14、第三双轴舵机15)按相反方向,相同转角输出,使得控制鱼身向相反方向摆动,当最后一关节到达限位后,重复上一动作,以此循环。
[0050]
当执行左转命令时,三个双轴舵机(第一双轴舵机13、第二双轴舵机14、第三双轴舵机15)从“0位”(鱼体各部分处在同一基准线)同时向顺时针摆动不同角度8
°
、10
°
、12
°
,与前进指令同理,即各个双轴舵机带动后一关节外壳旋转,当最后一关节外壳完成摆动到达限位,向相反方向摆动相同角度-8
°
、-10
°
、-12
°
,使得最后一关节外壳到达“0位”后,重复初始动作,以此循环。
[0051]
执行右转命令同上,仅起始摆动方向与左转命令相反。
[0052]
2)上升、下潜与急停命令:
[0053]
由头部硬件舱2中的pcb板控制芯片向内部单轴舵机12发送给定的pwm信号予以控制。
[0054]
上升下潜命令中,鱼体保持前进或转向状态;当执行上升命令时,单轴舵机12输出轴顺时针旋转45
°
,与之相固定的锥齿轮舵盘16与套轴锥齿轮23相啮合(传动比1:1),使得套轴锥齿轮23带动鱼胸鳍传动轴9顺时针方向旋转45
°
,胸鳍传动轴9又带动一对鱼胸鳍(第一鱼胸鳍10、第二鱼胸鳍11)从水平位置顺时针旋转45
°
,使得一对鱼胸鳍(第一鱼胸鳍10、第二鱼胸鳍11)与水流形成最大上升攻角。
[0055]
下潜命令同理,单轴舵机12输出轴改为逆时针旋转,一对鱼胸鳍(第一鱼胸鳍10、第二鱼胸鳍11)与水流形成最大下降攻角。执行急停命令时,鱼体停止游动,与之相固定的锥齿轮舵盘16与套轴锥齿轮23相啮合(传动比1:1),使得套轴锥齿轮23带动鱼胸鳍传动轴9顺时针方向旋转90
°
,胸鳍传动轴9又带动一对鱼胸鳍(第一鱼胸鳍10、第二鱼胸鳍11)从水平位置顺时针旋转90
°
,使得一对鱼胸鳍(第一鱼胸鳍10、第二鱼胸鳍11)与水流方向呈垂直状态,增大鱼体收到的水流阻力,以缩短鱼体停止运动后因惯性导致的位移量。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。