1.本发明涉及虚拟现实(vr)原地行走装置技术领域,尤其涉及一种用于动力行走设备的互连式减重装置。
背景技术:
2.随着科学技术的进步,虚拟现实(virtual reality)技术(简称vr)快速发展,vr技术利用电脑模拟产生三维空间的虚拟世界,给使用者提供视觉、听觉、触觉等感官模拟,让使用者产生身临其境的感觉。体验虚拟世界需要以自然的行走动作在虚拟场景中漫游,现有的vr全方向行走设备,如omni、无限甲板的缺点是体积庞大,难以普及使用。之后出现了以ekto one为代表的有动力的双脚穿戴式全方向原地行走设备,这类设备像靴子一样穿戴于使用者的双脚,使用电池供电、电动机驱动,带动使用者未抬起的脚向使用者行走动作的相反方向移动,将使用者的位置维持在一定范围内,实现原地行走,其缺点是重量明显超过普通靴子,使用者双脚需要承受驱动电机和电池的重量,使用者容易产生疲劳感。
3.现有技术中,具有电池和动力装置的双脚穿戴式动力轮滑鞋,能带动使用者在平滑表面移动,成本较低,易于普及,因为没有传感系统和控制系统,虽然能带动使用者双脚向使用者行走动作的相反方向移动,但是难以将使用者的位置维持在一定范围内。
技术实现要素:
4.为解决上述问题,本发明提出一种用于动力行走设备的互连式减重装置,是一种可与具有双脚独立动力驱动的穿戴式设备连接的附加配件。本发明通过对所连接的动力行走设备施加与重力方向相反的作用力,抵消双脚穿戴式动力行走设备的自身重量。还可以通过本发明设置的传感系统和控制系统,使双脚穿戴式动力行走设备(如电动轮滑鞋)实现原地行走功能。
5.本发明包括:连杆(1、2)、连接部件(3)、重力抵消部件(6),所述连杆至少设置两个,两个连杆连接在一个连接部件,以连接部件为轴转动,所述连杆和/或所述连接部件设置所述重力抵消部件,连杆用于连接动力行走设备(10、20),连杆随所连接的动力行走设备运动,连杆将重力抵消部件的作用力传递给动力行走设备,抵消动力行走设备受到的重力。
6.进一步地,本发明的重力抵消部件包括:弹簧、气压伸缩杆(63)中至少一种,弹簧包括:压缩弹簧(61)、拉伸弹簧(62)、扭转弹簧(6)中至少一种。
7.进一步地,本发明的连杆(1、2)或连接部件(3)设置轮子(51),轮子支撑连杆或连接部件,所述轮子包括:万向脚轮。
8.更进一步地,本发明的连杆(1、2)或连接部件(3)设置支撑部件(30),支撑部件设置轮子(51),所述轮子包括:万向脚轮。
9.进一步地,本发明的连杆(1、2)设置两个以上,两个连杆连接在一个所述连接部件(3),以连接部件为轴转动。
10.更进一步地,本发明的连杆(1、2)具有伸缩结构,所述伸缩结构的伸缩部件(110、
220)连接所述动力行走设备(10、20)。
11.进一步地,本发明的连杆(1、2)设置用于连接动力行走设备(10、20)的固定部件,固定部件包括:螺丝(121)、绑带(122)、卡扣(123)中至少一种。
12.进一步地,本发明设置传感系统,传感系统检测的信息包括:运动方向、运动速度、高度中至少一种,所述传感系统检测的对象包括:连杆(1、2)、连接部件(3)、重力抵消部件(6)、所述动力行走设备(10、20)中至少一种,所述传感系统信息发送的对象包括:所述动力行走设备。
13.更进一步地,本发明设置控制系统,控制系统接收的信息来源包括:传感系统,控制系统控制的对象包括:动力行走设备(10、20)的动力装置,控制系统的功能包括:接收来自所述传感系统的信息,控制动力行走设备的动力装置,实现所述动力行走设备的使用者原地行走。
附图说明
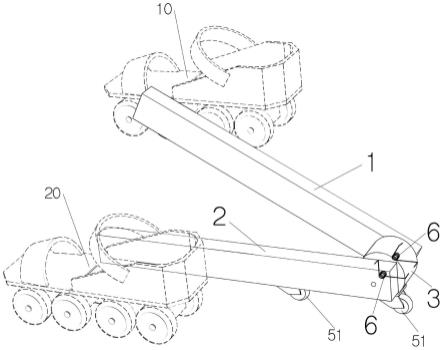
14.图1是本发明的连杆与动力行走设备连接示意图。
15.图2是本发明设置两个连杆与连接部件结构示意图。
16.图3a、3b、3c是本发明的重力抵消部件三种形式示意图。
17.图4是本发明设置两个以上连杆示意图。
18.图5是本发明的连杆具有伸缩结构示意图。
19.图6a、6b、6c是本发明的连杆设置固定部件的三种形式示意图。
具体实施方式
20.下面结合附图和实施例对本发明进行说明,实施例的内容不作为对本发明保护范围的限制。
21.附图1是本发明的结构示意图和连杆与动力行走设备连接的实施例。如附图1所示,本发明设置至少两个连杆,连杆1、2共同连接在连接部件3,连杆1与动力行走设备10连接,连杆2与动力行走设备20连接,进一步地,连杆1与动力行走设备10转动连接,连杆2与动力行走设备20转动连接。连杆1、2共同连接在连接部件3,连杆1、2以连接部件3为轴转动。连杆1、2和连接部件3中的一个或两个或全部设置重力抵消部件6,进一步地,连杆1、2与连接部件3同轴连接,重力抵消部件6设置在连杆1与连接部件3之间,重力抵消部件6与连杆1和连接部件3接触;重力抵消部件6设置在连杆2与连接部件3之间,重力抵消部件6与连杆2和连接部件3接触。设置在连杆1与连接部件3之间的重力抵消部件6,对连杆1施加图中向上方抬升的力;设置在连杆2与连接部件3之间的重力抵消部件6,对连杆2施加图中向上方抬升的力。进一步地,重力抵消部件6是扭转弹簧,重力抵消部件6对连杆1和连杆2施加图中以连接部件3为轴的顺时针方向的扭转力。连杆1与动力行走设备10连接,将重力抵消部件6的扭转力传递给动力行走设备10,抵消动力行走设备10受到的重力;连杆2与动力行走设备20连接,将重力抵消部件6的扭转力传递给动力行走设备20,抵消动力行走设备20受到的重力。
22.如附图1所示,连接部件3设置2个轮子51。重力抵消部件6对连杆1、2和连接部件3施加轴向相反的扭转力,使连接部件3产生转动,连接部件3设置的轮子51与承载动力行走设备10、20的物体上表面(如地面)接触,支撑连接部件3并限制连接部件3的转动角度,使连
接部件3保持相对于承载动力行走设备10、20的物体(如地面)角度不变,实现重力抵消部件6对连杆1、2施加图中向上方的作用力。
23.附图2是本发明设置的两个连杆与连接部件的实施例示意图。如附图2所示,连杆1、2共同连接在连接部件3,连接部件3具有零件31、32、35,零件31与连杆1转动连接,零件31与连杆1在所接触的平面转动;零件32与连杆2转动连接,零件32与连杆2在所接触的平面转动。零件31、32共同与零件35铰接。连杆1、2在保持机械连接的同时可改变相对角度。连杆1与零件31可同轴转动,连杆2与零件32可同轴转动,零件31、32以在零件35的铰接点为轴转动,连杆1与连杆2可改变夹角。进一步地,连接部件3设置支撑部件30,支撑部件30可与承载动力行走设备10、20的物体(如地面)接触,支撑部件30可以设置轮子,所述轮子与承载动力行走设备10、20的物体接触。支撑部件30支撑连接部件3并限制连接部件3的转动角度,使连接部件3保持相对于承载动力行走设备10、20的物体角度不变。如附图2所示,连杆1设置部件11,部件11连接动力行走设备10,进一步地,部件11具有活动结构,动力行走设备10可相对于连杆1多轴向转动角度,进一步地,部件11是万向节;连杆2设置部件12,部件12连接动力行走设备20,进一步地,部件12具有活动结构,动力行走设备20可相对于连杆2多轴向转动角度,进一步地,部件12是万向节。
24.附图3a、3b、3c是本发明重力抵消部件的三种实施例的示意图。附图3a、3b、3c中只绘制了连杆2设置的重力抵消部件61、62、63,因为连杆1设置的重力抵消部件与连杆2设置的重力抵消部件完全相同,所以附图中以连杆2设置的重力抵消部件61、62、63作为实施例说明。
25.如附图3a所示,连杆1、2共同与连接部件3连接,连接部件3设置支撑部件30,支撑部件30具有2个轮子51,轮子51支撑连接部件3和支撑部件30,增强连接部件3的稳定性,使连接部件3与承载轮子51的物体(如地面)保持相同角度。连杆2与支撑部件30之间设置重力抵消部件61,进一步地,重力抵消部件61是压缩弹簧,连杆2,以连杆2与连接部件3的铰接点为轴转动,连杆2受到图中向下方向的压力时,在图中逆时针方向转动,连杆2与支撑部件30压缩重力抵消部件61,重力抵消部件61是压缩弹簧,受力后长度缩短,对连杆2与支撑部件30施加方向相反的作用力,支撑部件30受到轮子51的支撑,与承载轮子51的物体(如地面)保持相同角度,重力抵消部件61对连杆2施加的力,抵消连杆2所连接物体受到的重力,进一步地,抵消动力行走设备20受到的重力(如附图1所示)。实际实施中,连杆1与支撑部件30之间同样设置重力抵消部件61。如附图3a所示,连杆1设置部件11,部件11用于连接并固定使用者脚部穿戴的动力行走设备。实际实施中,连杆2同样设置用于连接并固定使用者脚部穿戴的动力行走设备的部件11。
26.如附图3b所示,连杆1、2共同与连接部件3连接,连接部件3设置支撑部件30,支撑部件30具有2个轮子51,轮子51支撑连接部件3和支撑部件30,增强连接部件3的稳定性,使连接部件3与承载轮子51的物体(如地面)保持相同角度。连杆2与支撑部件30的零件301之间设置重力抵消部件62,进一步地,重力抵消部件62是拉伸弹簧。连杆2,以连杆2与连接部件3的铰接点为轴转动,连杆2受到图中向下方向的压力时,在图中逆时针方向转动。连杆2与零件301拉伸重力抵消部件62,重力抵消部件62是拉伸弹簧,长度伸长,对连杆2与零件301施加方向相对的作用力,支撑部件30和零件301受到轮子51的支撑,与承载轮子51的物体(如地面)保持相同角度,重力抵消部件62对连杆2施加的力抵消连杆2所连接物体受到的
重力,进一步地,抵消动力行走设备20受到的重力(如附图1所示)。实际实施中,连杆1与支撑部件30的零件301之间同样设置重力抵消部件62。如附图3a所示,连杆1设置部件11,部件11用于连接并固定使用者脚部穿戴的动力行走设备。实际实施中,连杆2同样设置用于连接并固定使用者脚部穿戴的动力行走设备的部件11。
27.如附图3c所示,连杆1、2共同与连接部件3连接,连接部件3设置支撑部件30,支撑部件30具有2个轮子51,轮子51支撑连接部件3和支撑部件30,增强连接部件3的稳定性,使连接部件3与承载轮子51的物体(如地面)保持相同角度。连杆2与支撑部件30之间设置重力抵消部件63,进一步地,重力抵消部件63是气压伸缩杆。连杆2,以连杆2与连接部件3的铰接点为轴转动,连杆2受到图中向下方向的压力时,在图中逆时针方向转动,连杆2与支撑部件30压缩重力抵消部件63,重力抵消部件63是气压伸缩杆,整体长度缩短,对连杆2与支撑部件30施加方向相反的作用力,支撑部件30受到轮子51的支撑,与承载轮子51的物体(如地面)保持相同角度,重力抵消部件63对连杆2施加的力抵消连杆2所连接物体受到的重力,进一步地,抵消动力行走设备20受到的重力(如附图1所示)。实际实施中,连杆1与支撑部件30之间同样设置重力抵消部件63。如附图3a所示,连杆1设置部件11,部件11用于连接并固定使用者脚部穿戴的动力行走设备。实际实施中,连杆2同样设置用于连接并固定使用者脚部穿戴的动力行走设备的部件11。
28.附图4是本发明设置两个以上连杆的实施例示意图。如附图4所示,连杆1与连杆100共同与连接部件37连接,连杆2与连杆100共同与连接部件38连接,连杆100设置支撑部件30,支撑部件30具有2个轮子51,连杆100设置2个轮子51。连杆1与连杆101共同与连接部件33连接,连杆101设置部件11,部件11连接动力行走设备10。连杆2与连杆202共同与连接部件36连接,连杆202设置部件12,部件12连接动力行走设备20。4个轮子51接触承载动力行走设备10、20的物体表面(如地面),支撑连杆100和支撑部件30,进一步地,支撑与连杆100连接的连杆1、2和连杆101、202。进一步地,连接部件30保持连杆100相对于承载动力行走设备10、20的物体(如地面)方向稳定。
29.具体实施中,动力行走设备10与连杆101共同连接的部件11,实现动力行走设备10与连杆101保持机械连接的同时可相对多轴向转动,连接部件33可实现连杆101相对于连杆1多轴向转动(原理同附图2);动力行走设备20与连杆202共同连接的部件12,实现动力行走设备20与连杆202保持机械连接的同时可相对多轴向转动,连接部件36可实现连杆202相对于连杆2多轴向转动(原理同附图2)。进一步地,部件11、12是万向节。连接部件37、38实现连杆1、2与连杆100保持机械连接的同时,连杆1、2可相对连杆100多轴向转动。进一步地,重力抵消部件对连杆1、2施加的力,经过连接部件33、36和连杆101、202传递给动力行走设备10、20,抵消动力行走设备10、20受到的重力,使用者双脚穿戴动力行走设备10、20,不会感觉到动力行走设备10、20的重量,同时连杆101、202、1、2、100随使用者双脚的动作改变相对角度并移动位置。进一步地,所述重力抵消部件可设置在连杆1、2或连杆100或连接部件37、38,重力抵消部件可使用如附图1中的扭转弹簧,也可以使用如附图3a、3b、3c中的压缩弹簧61、拉伸弹簧62、气压伸缩杆63中的至少一种。
30.附图5是本发明的连杆具有伸缩结构实施例示意图。如附图5所示,连杆1、2共同与连接部件3连接,连接部件3设置支撑部件30,支撑部件30具有2个轮子51,轮子51支撑连接部件3和连杆1、2。轮子51接触承载动力行走设备10、20的物体表面(如地面),使连接部件3
与承载轮子51的物体保持相同角度。连杆1、2具有伸缩结构,连杆1设置有伸缩部件110,连杆2设置有伸缩部件220。伸缩部件110设置部件11,部件11连接动力行走设备10;伸缩部件220设置部件12,部件12连接动力行走设备20。伸缩部件110在连杆1上做伸缩运动,伸缩部件110连接的动力行走设备10可相对连接部件3改变位置;伸缩部件220在连杆2上做伸缩运动,伸缩部件220连接的动力行走设备20可相对连接部件3改变位置。
31.如附图5所示,动力行走设备10未抬起,与轮子51的最低点处于同一平面,动力行走设备20抬起,动力行走设备20与伸缩部件220连接,带动伸缩部件220在连杆2做伸缩运动。动力行走设备20抬起,带动伸缩部件220伸出连杆2外部,随动力行走设备20的抬升动作,伸缩部件220逐渐伸出连杆2。设置在连接部件3的重力抵消部件6对连杆2施加图中方向向上的作用力,所述作用力通过连杆2传递给伸缩部件220,伸缩部件220通过部件12将作用力传递给动力行走设备20,抵消动力行走设备20受到的重力。实际实施中,连杆1、2设置的伸缩部件110、220可实现使用者双脚穿戴动力行走设备10、20动作时,动力行走设备10、20相对位置变化的灵活度。
32.附图6a、6b、6c是本发明的连杆设置固定部件三种实施例示意图。
33.附图6a是本发明的连杆设置固定部件是螺丝的实施例示意图。如附图6a所示,连杆2设置部件12,部件12与动力行走设备20连接,部件12设置固定部件121,固定部件121用于将部件12与动力行走设备20固定。本实施例中,固定部件121是螺丝,进一步地,固定部件121是手拧螺丝。
34.附图6b是本发明的连杆设置固定部件是绑带的实施例示意图。如附图6b所示,连杆2设置部件12,部件12设置固定部件122,固定部件122用于将部件12与动力行走设备20固定。本实施例中,固定部件122是绑带,进一步地,固定部件122的材质具有弹力。
35.附图6c是本发明的连杆设置固定部件是卡扣的实施例示意图。如附图6c所示,连杆2设置部件12,部件12与动力行走设备20连接,连接部件12设置固定部件123,固定部件123用于将部件12与动力行走设备20固定。本实施例中,固定部件123是卡扣,进一步地,固定部件123的材质是高弹性钢。
36.本说明书所描述的实施例仅是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域技术人员在未作出创造性劳动前提下获得的所有其他实施例都属于本发明保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
