一种用作集装箱锁具位置扫描识别的方法
1.技术领域:本发明涉及一种用作集装箱锁具位置扫描识别的方法。
2.
背景技术:
随着船舶海运行业的快速发展,作为海运物流的重要装载工具,各大港口的集装箱吞吐量不断增长,为了更好提高码头集装箱装卸作业的效率,对相关流程进行自动化改造的需求日益迫切。其中,集装箱装卸过程中的卸锁和装锁的速度,日益成为整个生产流程中的效率瓶颈。为了适应自动化生产的需求,产业界迫切需要一种针对锁具系统的高效识别方法,以利于自动拆装锁执行系统正确执行拆装锁动作。传统的识别方法基于二维图像进行辨识和计算,受环境光和锁具表面状态影响较大,同时无法正确校验各类异常结果,具有一定的局限性。
3.
技术实现要素:
本发明是为了解决上述现有技术存在的问题而提供一种用作集装箱锁具位置扫描识别的方法。
4.本发明所采用的技术方案有:一种用作集装箱锁具位置扫描识别的方法,所述锁具包括锁件和角件,其特征在于:锁具位置扫描识别包括以下步骤:s1.使用三维激光传感器获取目标区域的三维点云数据;s2.对获取的三维点云数据进行等区域间隔采样处理;s3. 获取三维点云数据的极大值和极小值,识别锁件的顶点在三维空间中的三维坐标;s4.根据s3中获取的三维坐标,计算该三维坐标相邻区域内的采样数据分布,根据实际锁件在当前采样分辨率条件下的相邻区域内采样点理论数值,校验s3中识别的锁件顶点在三维空间中位置的合法性;s5.依据s4校验完成的锁件顶点三维坐标结果,计算锁件在垂直方向上的截面积分布曲线;s6.依据s5获得的截面积分布曲线,使用曲线斜率的分布规律判断和计算锁件的锁颈所在位置,该位置结果同时包括锁颈柱状体两端在垂直方向上的高度坐标;s7.依据s6及s4的计算结果,返回锁件顶点和锁颈(锁件的特征点)的三维坐标;s8. 如果当前被扫描区域为角件,则使用极值特征获取角件下表面高度;s9. 依据s8获取的计算结果,使用点云平面特征进行角件下表面高度的计算结果校验;s10.依据s9校验后的结果,在该平面内使用均值法,获取角件表面锁孔的中心位置;s11.依据s10的计算结果,即标准角件尺寸规范,校验计算结果;s12. 输出角件的特征点在采样图像三维空间中的坐标。
5.进一步地,s4中所述相邻区域为:以三维坐标的坐标值为圆心,坐标值的1/2为半
径画圆。
6.进一步地,s8中极值特征指:角件下表面高度的整个扫描区最大值。
7.进一步地,角件下表面高度最大值获取过程为:角件下表面高度通过逐个比较采用点的高度值,即可获得角件下表面高度最大值。
8.进一步地,s12中角件的特征点为角件下表面的中心点。
9.进一步地,s4中三维坐标相邻区域内的采样数据分布计算过程为:步骤1):获取锁件顶点在xy平面的坐标(x,y);步骤2):设定用于检索的范围值distance(一般取30mm);步骤3):遍历所有采样点,取出所有满足如下条件的点: 在xy平面上的投影点,与锁件顶点在xy平面上的投影点的直线距离小于distance;步骤4):使用步骤3)所筛选出的点,计算他们的z值的均值,如果与锁件顶点坐标比较,相差小于5%,则认定锁件顶点计算值是有效值;步骤5):如果步骤4)的比较结果大于5%,则认定上一步骤所获得的锁件顶点坐标,是激光采样噪点引起的,需要在原始数据数据中予以剔除,重新计算锁件顶点坐标。
10.本发明具有如下有益效果:本发明对传统扫描识别方法进行改进,采用三维点云数据作为采集数据,可以对二维图像无法高效识别的细节特征进行准确的识别,大大提升识别成功率,该方法同时涵盖了对锁件和角件的识别方法,实现对集装箱锁具系统的完整识别,该方法包括一系列的校验机制,有较高的容错性能。
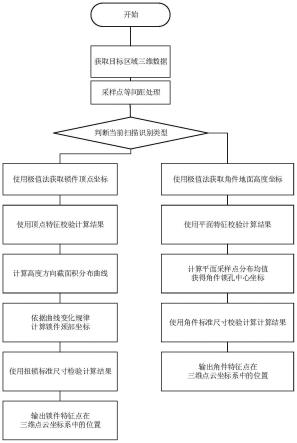
11.附图说明:图 1为本发明流程图。
12.具体实施方式:下面结合附图对本发明作进一步的说明。
13.如图1所示,本发明一种用作集装箱锁具位置扫描识别的方法,本发明包括对锁件及角件的扫描定位,涉及船舶运输技术领域。该扫描识别系统的识别扫描方法,包括如下步骤:首先获取现场锁具的三维点云图像,获取的方法包括但不仅限于使用各类二维及三维激光传感器对目标锁具(包括锁件和角件)进行三维激光扫描;计算采样范围内的极值范围检索锁件顶点位置;校验锁具顶点是否为极大值所在位置;在垂直方向进行截面积统计;根据截面积分布规律获取锁件颈部在采样空间中的坐标;校验锁件颈部位置的合法性;获取角件平面高度;获取角件锁孔中心在三维空间中的位置信息。
14.具体的操作方法如下:s1.使用三维激光传感器获取目标区域的三维点云数据,获取的主要方式既包括一次成像,也包括使用单次获取空间线数据进行拼接,获得完整图像。
15.在本实施例中,使用激光二维线传感器,使用平移扫描的方式,获得现场的完整三维图像。
16.s2.对三维数据进行等间距采样处理:对原始数据采样后非等间距的数据进行处理,使用插补法,确保没和采样点在xy平面是上的均匀分布,以利于后续步骤。
17.在本实施例中,将原始三维图像的采样点设置为5cm的采样间隔,确保可以获得采
样间距均匀一致的三维图像,以利于后续处理。
18.s3.获取数据的极大值和极小值,识别锁件的顶点在三维空间中的位置。
19.在本实施例中,依次比较所有采样点的z值(垂直方向的数值),在所有采样点中找到最大的100个采样点,为了确保偶然误差不对计算产生干扰,去掉最大的20个,由于现场实际分布中,最大值的位置会被采样较多的点,去掉20个值不会对正确图像产生干扰,只会去掉干扰值,使用同样的方式获取最小值。
20.s4.对s3中获取的三维坐标,计算相邻区域的采样数据分布,根据实际锁件在当前采样分辨率条件下的相邻采样点理论数值,校验该位置的合法性。
21.该步骤中相邻区域为:以三维坐标的坐标值为圆心,坐标值的1/2为半径画圆。
22.s5.依据s4校验完成的顶点三维坐标结果,计算锁件在垂直方向上的截面积分布曲线;s6.依据s5获得的截面积分布曲线,使用曲线斜率的分布规律判断和计算锁件的锁颈所在位置,该结果同时包括锁颈柱状体两端在垂直方向上的高度坐标;s7.依据s6及s4的计算结果,返回锁件特征点(顶点和锁颈)的三维坐标;s8.如果当前被扫描区域为角件,则使用极值特征获取角件下表面高度; s9.依据s8获取的计算结果,使用点云平面特征进行计算结果校验; s10.依据s9校验后的结果,在该平面内使用均值法,获取表面锁孔的中心位置;s11.依据s10的计算结果,及标准角件尺寸规范,校验计算结果; s12.输出角件特征点(角件特征点为角件下表面的中心点),在采样图像三维空间中的坐标。
23.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下还可以作出若干改进,这些改进也应视为本发明的保护范围。
技术特征:
1.一种用作集装箱锁具位置扫描识别的方法,所述锁具包括锁件和角件,其特征在于:锁具位置扫描识别包括以下步骤:s1.使用三维激光传感器获取目标区域的三维点云数据;s2.对获取的三维点云数据进行等区域间隔采样处理;s3.获取三维点云数据的极大值和极小值,识别锁件的顶点在三维空间中的三维坐标;s4.根据s3中获取的三维坐标,计算该三维坐标相邻区域内的采样数据分布,根据实际锁件在当前采样分辨率条件下的相邻区域内采样点理论数值,校验s3中识别的锁件顶点在三维空间中位置的合法性;s5.依据s4校验完成的锁件顶点三维坐标结果,计算锁件在垂直方向上的截面积分布曲线;s6.依据s5获得的截面积分布曲线,使用曲线斜率的分布规律判断和计算锁件的锁颈所在位置,该位置结果同时包括锁颈柱状体两端在垂直方向上的高度坐标;s7.依据s6及s4的计算结果,返回锁件顶点和锁颈的三维坐标;s8. 如果当前被扫描区域为角件,则使用极值特征获取角件下表面高度;s9. 依据s8获取的计算结果,使用点云平面特征进行角件下表面高度的计算结果校验;s10.依据s9校验后的结果,在该平面内使用均值法,获取角件表面锁孔的中心位置;s11.依据s10的计算结果,即标准角件尺寸规范,校验计算结果;s12. 输出角件的特征点在采样图像三维空间中的坐标。2.如权利要求1所述的用作集装箱锁具位置扫描识别的方法,其特征在于:s4中所述相邻区域为:以三维坐标的坐标值为圆心,坐标值的1/2为半径画圆。3.如权利要求1所述的用作集装箱锁具位置扫描识别的方法,其特征在于:s8中极值特征指:角件下表面高度的整个扫描区最大值。4.如权利要求3所述的用作集装箱锁具位置扫描识别的方法,其特征在于:角件下表面高度最大值获取过程为:角件下表面高度通过逐个比较采用点的高度值,即可获得角件下表面高度最大值。5.如权利要求1所述的用作集装箱锁具位置扫描识别的方法,其特征在于:s12中角件的特征点为角件下表面的中心点。6.如权利要求1所述的用作集装箱锁具位置扫描识别的方法,其特征在于:s4中三维坐标相邻区域内的采样数据分布计算过程为:步骤1):获取锁件顶点在xy平面的坐标(x,y);步骤2):设定用于检索的范围值距离;步骤3):遍历所有采样点,取出所有满足如下条件的点: 在xy平面上的投影点,与锁件顶点在xy平面上的投影点的直线距离小于范围值距离;步骤4):使用步骤3)所筛选出的点,计算他们的z值的均值,如果与锁件顶点坐标比较,相差小于5%,则认定锁件顶点计算值是有效值;步骤5):如果步骤4)的比较结果大于5%,则认定上一步骤所获得的锁件顶点坐标,是激光采样噪点引起的,需要在原始数据数据中予以剔除,重新计算锁件顶点坐标。
技术总结
本发明公开了一种用作集装箱锁具位置扫描识别的方法,使用激光传感器获取获取待识别区域的三维图像,使用极值获得锁尖顶点的三维空间坐标,并根据集装箱外形尺寸规范进行合法性校验,主要包括锁尖锁具坐标系下的相对位置;使用锁件截面积分布规律识别锁颈柱状体位置;使用极值法获取角件底面坐标;使用均值法获取角件锁孔的坐标。本方法基于上述步骤获得了集装箱锁具(包括锁件和角件)在三维空间中的位置,以利于其他设备对锁具进行自动化的装、卸和移动等操作。卸和移动等操作。卸和移动等操作。
技术研发人员:叶林 陈卓鹏 徐佩文 刘进波 施海庆
受保护的技术使用者:南京闻望自动化有限公司
技术研发日:2022.03.28
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
