1.本发明涉及一种基于密度聚类和幅度-距离特征联合的目标识别方法,属于雷达干扰识别及目标识别技术领域。
背景技术:
2.在反舰导弹对海探测中,角反射器干扰是一种典型的无源欺骗式干扰,广泛应用在雷达对抗场景中。为了有效欺骗反舰导弹,敌方舰队通常会在舰船周围布置有效角反射器或者角反射阵列,对雷达导引头搜索和跟踪阶段产生冲淡式和质心式干扰,以此达到欺骗雷达导引头探测舰船的目的。为了实现反舰导弹精确打击海面高价值目标,研究对抗角反射器干扰的技术十分必要。目前角反射器干扰和舰船目标鉴别方法主要有:基于极化分解方法和基于微多普勒特征方法。
3.虽然这些方法对角反射器干扰有一定对抗效果,但雷达导引头提取目标或干扰的极化信息比较困难,同时由于地面/海面强杂波在回波信号频谱会产生杂波谱,基于微多普勒特征的抗干扰方法效果也会十分有限。针对上述问题,本发明致力于探索利用雷达一维距离像数据的帧内和帧间的多维特征联合,实现对舰船目标和角反射器干扰进行识别。
技术实现要素:
4.本发明的目的在于针对角反射器干扰存在的前提下,通过极化处理方式抗干扰的实用性较差,基于微多普勒特征的抗干扰方法效果会受杂波谱影响,导致目标识别效率低的问题,提出了一种基于密度聚类和幅度-距离特征联合的目标识别方法。
5.为了达到上述目的,本发明采取如下技术方案。
6.所述基于密度聚类和幅度-距离特征联合的目标识别方法,包括:
7.s1:对每一帧数据进行帧内的非相参积累,得到该帧非相参积累后的数据;
8.s2:将s1得到的非相参积累后的数据进行cfar检测,得到cfar检测后过门限的点,并保存;
9.s3:对s2输出的cfar检测后过门限的点逐帧进行密度聚类,得到聚类结果,具体包括如下子步骤:
10.s31、根据s2输出的cfar检测后过门限的点在一维距离像上分布的密度对其进行聚类,得到密度聚类结果,具体为:计算每个点周围的高斯密度,选取密度较高且间隔较大的点作为聚类中心,将其它点划分到与该点距离最短的聚类中心的那一类;遍历所有点,得到密度聚类结果;
11.s32、对s31输出的密度聚类结果进行二次聚类,得到聚类结果,具体为:计算s31输出的密度聚类结果中的每一类之间的距离,将距离更近的两类进行合并,得到聚类结果;
12.s4:对s3输出的聚类结果逐帧进行目标和干扰的识别,具体包括如下几个子步骤:
13.s41、根据s3输出的每帧数据的聚类进行帧内判断,得到类型识别结果,具体为:计算一帧数据中每一类的幅度熵,幅度熵最大的类认为是舰船目标类,幅度熵最小的类认为
是干扰类;
14.s42、判断s41的类型识别结果是否正确,如果类型识别正确则保存分类识别结果和目标信息,否则,若类型识别错误跳至s43,具体为:计算s41中舰船类当前的距离和前五帧舰船类距离均值差值的绝对值;若差值绝对值过大则认为类型识别错误,跳至s43进行二次判断,反之则认为类型识别正确,则保存分类识别结果和目标信息;
15.其中,舰船类当前的距离及前五帧舰船类距离中每一类的距离是指该类中幅度最高点对应的距离;
16.s43、利用数据的帧间信息进行二次判断,得到分类识别结果,具体为:分别计算当前帧下各类的距离与前五帧舰船类距离的方差,认为方差最小的类为舰船;
17.至此,从s1到s4,完成了一种基于密度聚类和幅度-距离特征联合的目标识别方法。
18.有益效果
19.本发明提出的一种基于密度聚类和幅度-距离特征联合的目标识别方法,与现有目标识别方法相比,具有如下有益效果:
20.1.所述方法能对任意形状的数据进行聚类,而k-means等其他聚类算法一般只适用于凸数据集,而所述方法针对所采用的一维数据聚类效果更好;
21.2.所述方法不需预先设置初始值,故没有初始值对聚类结果的影响;
22.3.所述方法充分利用了数据的帧内和帧间信息,目标识别准确率更高。
附图说明
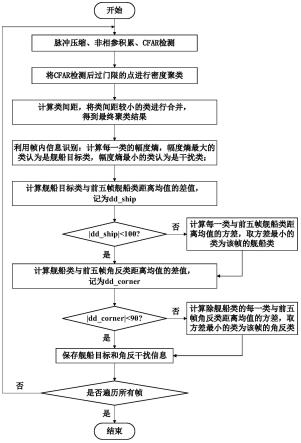
23.图1是本发明基于密度聚类和幅度-距离特征联合的目标识别方法的流程图;
24.图2是实例数据使用本发明基于密度聚类和幅度-距离特征联合的目标识别方法在角反射器干扰场景下以及使用k-means聚类算法的聚类结果图;
25.图3是本发明基于密度聚类和幅度-距离特征联合的目标识别方法在角反射器干扰场景下目标和干扰识别结果图。
具体实施方式
26.下面结合附图及具体实施例对本发明所述的一种基于密度聚类和幅度-距离特征联合的目标识别方法进行详细阐述。
27.实施例1
28.本发明所提方法理论上能应用于任何雷达一维距离像数据的目标和干扰识别,如角反射器干扰下的目标识别。通常针对角反射器干扰下的目标识别,使用基于微多普勒以及极化信息。一方面,极化信息提取较困难;另一方面,微多普勒信息因受杂波影响,抗干扰效果十分有限。本发明致力于探索利用雷达一维距离像数据的帧内和帧间的多维特征联合,实现对舰船目标和角反射器干扰进行识别。所述基于密度聚类和幅度-距离特征联合处理的目标识别方法的具体实施,其流程如图1所示。所述方法仅需要改变应用场景的参数设置。
29.本实施例描述了应用本发明所述的一种基于密度聚类和幅度-距离特征联合处理的目标识别方法在角反射器干扰场景下分别识别舰船目标和角反射器干扰的具体实施。
30.首先,对雷达接收到的回波信号进行脉冲压缩、非相参积累和cfar检测,一共有500帧数据,每帧数据包括64个脉冲;
31.接着,对每一帧cfar检测后过门限的点进行聚类;
32.这里,所述方法的聚类分为两步,第一步对所有数据进行密度聚类,将数据根据高斯密度分成很多小类,这里不需要预先设置类数,根据每一帧数据的各自的特征,分成不同的类,以第十帧cfar检测后过门限点为例,经过第一次密度聚类后共划分为了3类;第二步计算类间距,将类间距小于50的类合并。计算第十帧这3类的类间距,其类间距均大于50,最终得到该帧的聚类结果依旧是3类,记为cluster1、cluster2、cluster3。按该方法历遍所有帧,得到所有帧的聚类结果如图2a所示;
33.这里,对500帧数据采用k-means算法进行聚类,聚类数固定为4,聚类结果如图2b所示,图中可以看到很多应该在第二类的点被分到了第三类,其分类效果和准确率没有所述分类方法效果好。
34.然后对聚类结果进行识别,首先利用帧内信息幅度熵进行识别,计算每一类的幅度熵,幅度熵最大的认为是舰船,幅度熵最小的认为是角反,这里依旧以第十帧数据为例,分别计算cluster1、cluster2和cluster3的幅度熵为:1.8512、1.7913、3.1542,幅度熵最大的cluster3认为是舰船类,记为ship_clust,幅度熵最小的cluster2认为是角反类,记为corner_clust。
35.其中,幅度熵的定义如式(2)所示,其中,z(i),i=1,2,...,n为散射点的幅度,n为数据总数,pi代表z(i)出现的概率,用熵来表征能量的散布程度,能量越集中,熵值越小。
[0036][0037][0038]
然后利用帧间距离信息对数据进行二次判断,计算该帧下的舰船距离和前五帧舰船距离均值的差值,如果其绝对值大于100,则认为识别结果可能有误,再计算所有类距离和前五帧舰船距离的方差,取方差最小的类作为新的舰船类,并更新ship_clust;如果绝对值小于100,则认为识别正确,可以直接进行下一步;
[0039]
所述方法对第十帧数据计算舰船距离和前五帧舰船距离均值的差值为2.2,其绝对值小于100,认为识别正确。
[0040]
同理,计算该帧下的角反干扰距离和前五帧角反干扰距离均值的差值,如果其绝对值大于90,则认为识别可能有误,再计算除舰船类外的所有类和前五帧角反距离的方差,取方差最小的类作为新的角反类,并更新corner_clust;如果绝对值小于90,则认为识别正确,可以直接进行下一步;
[0041]
所述方法对第十帧数据计算角反干扰距离和前五帧角反干扰距离均值的差值为44.4,其绝对值小于100,认为识别正确。
[0042]
此外,所述方法中二次判断需要利用前五帧数据的信息,故所述方法中最开始的五帧数据不进行二次判断,并且上述所有提到的距离均为距离单元。
[0043]
然后选取舰船类和角反类中幅值最大的作为代表点,进行结果输出,对所有500帧
数据都进行上述操作后,输出舰船目标和角反射器干扰的点迹图,如图3所示。只利用帧内幅度熵信息进行识别,目标识别准确率为90.45%,利用帧间距离信息进行二次判断后,目标识别准确率为95.25%,相比于只利用单个目标特征进行识别,所述幅度-距离多维特征联合识别方法的目标识别准确率提高了4.8%。
[0044]
至此,即完成了本发明所述的一种基于密度聚类和幅度-距离特征联合处理的目标识别方法在角反射器干扰场景下进行目标和干扰识别的具体实施。
[0045]
以上所述为本发明的较佳实施例而已,本发明不应该局限于该实施例和附图所公开的内容。凡是不脱离本发明所公开的精神下完成的等效或修改,都落入本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。