一种基于轻量化网络的sar图像实时检测方法
技术领域
1.本发明涉及计算机领域中的深度学习技术领域,其中涉及一种基于轻量化网络的sar图像实时检测方法。
背景技术:
2.合成孔径雷达(synthetic aperture radar,sar)是全天候海洋监测的可靠工具。舰船在sar图像中作为有价值的海洋目标一直是海洋监测的重点。近年来,sar舰船检测因其在海洋中的巨大价值而日益受到关注,例如交通控制、渔业管理、环境保护、灾难救援等。在民用方面,它有助于水上运输管理,在军事方面,它在确保战场主动性方面发挥着重要作用。
3.到目前为止,已经出现了许多sar舰船检测方法或算法,但现有的大多数研究都是以牺牲检测速度为代价来提高检测精度。此外,我们的调查发现,很少有研究关注检测速度。然而,sar应用包括图像的获取和解释。成像算法是前者的重点,而图像处理技术是后者的重点,事实上,后者提高检测速度是有价值的,而毫秒级速度的提高是一个巨大的进步。简而言之,牺牲速度来换取准确性是不令人满意的,因为一些实时场合既需要高精度,也需要高速度,例如紧急军事部署、快速海上救援等。
技术实现要素:
4.鉴于现有技术中网络模型尺寸大、检测速度慢等问题,本发明旨在于提供一种基于轻量化网络的sar图像实时检测方法,适用于sar图像中舰船目标的自主实时检测。
5.为了实现上述目的,本发明采用的技术方案如下:
6.一种基于轻量化网络的sar图像实时检测方法,所述方法包括以下步骤:
7.s1图像数据预处理,利用图像标注软件对图像中待检测的舰船目标进行标注,类别标签为“ship”;
8.s2使用改进的yolov5算法对预处理后的训练集进行训练;
9.s3使用训练得到的网络对测试集进行测试。
10.需要说明的是,所述步骤s1中,每个目标均由一个四边形进行标注,具体形式为(x
min
,y
min
,x
max
,y
max
),其中(x
min
,y
min
)表示左上角的顶点,(x
max
,y
max
)表示右下角的顶点;随机将所有图像按7:2:1的比例分成训练集、验证集和测试集;先采用矩形填充算法将图像尺寸统一为608pixel
×
608pixel,然后使用mosaic数据增强对训练集图像处理。
11.需要说明的是,所述步骤s2中,利用k-近邻聚类方法对训练集中的标注框进行聚类后分为9类,获取9类框的大小,以此来设置yolov5锚点框参数;其次,用一个大小为3
×
3,步长为2的卷积替代yolov5算法中的focus结构;然后,将空间金字塔池化的核大小设置为k=[5,9,13];接着,采用随机rrelu作为激活函数;最后,采用ciou作为边界框回归损失,训练直到损失函数不再降低,获取权重文件。
[0012]
需要说明的是,rrelu激活函数将所有负值指定非零斜率,其定义如下:
[0013][0014]
k~∪(l,u),l,u∈[0,1]
[0015]
其中,l,u是大于等于0且小于等于1中的一个随机数,k代表一个随机值,服从均匀分布∪(l,u);
[0016]
ciou损失函数定义如下:
[0017][0018][0019][0020]
其中,d和g分别表示预测框和真实框,ρ(
·
)表示计算两个边界框中心的欧式距离,δ表示包围预测框和ground-truth框的最小矩形的对角线距离,iou表示两个边界框的交集与并集比值,wg,hg表示真实框的宽和高,wd,hd表示预测框的宽和高,β是权衡参数,ν表示长宽比的一致性。
[0021]
需要说明的是,在所述步骤s3中利用步骤s2得到的权重文件,对测试集图像进行测试;与训练集图像预处理相同,测试集每一张图像统一为608pixel
×
608pixel。
[0022]
本发明有益效果在于:利用矩形填充和mosaic数据增强对训练集数据进行预处理,本发明的关键在于改进了yolov5算法,实现了高精度且高速地检测sar图像中舰船目标。
附图说明
[0023]
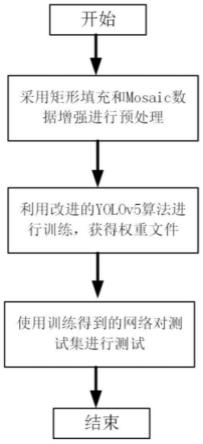
图1为本发明的基于轻量化网络的sar图像实时检测方法的流程示意图。
具体实施方式
[0024]
下将结合附图对本发明作进一步的描述,需要说明的是,本实施例以本技术方案为前提,给出了详细的实施方式和具体的操作过程,但本发明的保护范围并不限于本实施例。
[0025]
实施例
[0026]
如图1所示,本发明为一种基于轻量化网络的sar图像实时检测方法,所述方法包括以下步骤:
[0027]
s1图像数据预处理,利用图像标注软件对图像中待检测的舰船目标进行标注,类别标签为“ship”;
[0028]
s2使用改进的yolov5算法对预处理后的训练集进行训练;
[0029]
s3使用训练得到的网络对测试集进行测试。
[0030]
进一步的,本发明所述步骤s1中,每个目标均由一个四边形进行标注,具体形式为(x
min
,y
min
,x
max
,y
max
),其中(x
min
,y
min
)表示左上角的顶点,(x
max
,y
max
)表示右下角的顶点;随
机将所有图像按7:2:1的比例分成训练集、验证集和测试集;先采用矩形填充算法将图像尺寸统一为608pixel
×
608pixel,然后使用mosaic数据增强对训练集图像处理。
[0031]
进一步的,本发明所述步骤s2中,利用k-近邻聚类方法对训练集中的标注框进行聚类后分为9类,获取9类框的大小,以此来设置yolov5锚点框参数;其次,用一个大小为3
×
3,步长为2的卷积替代yolov5算法中的focus结构;然后,将空间金字塔池化的核大小设置为k=[5,9,13];接着,采用随机rrelu作为激活函数;最后,采用ciou作为边界框回归损失,训练直到损失函数不再降低,获取权重文件。
[0032]
进一步的,本发明的rrelu激活函数将所有负值指定非零斜率,其定义如下:
[0033][0034]
k~∪(l,u),l,u∈[0,1]
[0035]
其中,l,u是大于等于0且小于等于1中的一个随机数,k代表一个随机值,服从均匀分布∪(l,u);
[0036]
ciou损失函数定义如下:
[0037][0038][0039][0040]
其中,d和g分别表示预测框和真实框,ρ(
·
)表示计算两个边界框中心的欧式距离,δ表示包围预测框和ground-truth框的最小矩形的对角线距离,iou表示两个边界框的交集与并集比值,wg,hg表示真实框的宽和高,wd,hd表示预测框的宽和高,β是权衡参数,ν表示长宽比的一致性。
[0041]
进一步的,在本发明所述步骤s3中利用步骤s2得到的权重文件,对测试集图像进行测试;与训练集图像预处理相同,测试集每一张图像统一为608pixel
×
608pixel。
[0042]
对于本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及变形,而所有的这些改变以及变形都应该属于本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
