1.本发明属于医疗器械技术领域,具体涉及一种用于神经康复的柔性驱动手掌外骨骼机器人。
背景技术:
2.肢体残疾特别是上肢残疾作为一个有特殊困难和特殊要求的群体,在日常生活中将要面对很多生活问题和困难,对于丧失手部运动能力的患者而言,除了必要的手术和药物治疗外,科学有效的康复训练对患者手部功能的恢复起着不容忽视的重要作用。随着机器人和机械手等技术的蓬勃发展,越来越多的学者开始研究把机器人技术和手部康复技术理论结合起来,进行手部康复装置的设计,以便让更多的手部功能丧失的人群得到更好的康复训练,使其手部以更快更好的得到康复。
3.手掌外骨骼机器人是利用机械外骨骼模仿人体的手部关节,通过各关节的联动来实现帮助手部神经受损患者进行基本的抓取和释放动作的机械装置,外骨骼的设计对于手部神经受损患者具有重要的意义,在医疗器械和军事助残领域都有着广泛的应用。现有的外骨骼驱动方法多为连杆和齿轮等刚性机构驱动,在传力过程中,往往会碰到缓冲较差的问题,尤其是在关节变向的瞬间,将产生较大的冲击力,影响人机系统的稳定性,而且这些机器人一般都比较笨重,其复杂的机械装置导致了重量和体积的增长,同时也增加了使用者的外加负重。其次,目前市面上的手部康复机器人只能实现简单的张合动作,不能像人手那样根据抓取物体的形状做出不同的抓握动作,抓取的稳定性和灵巧性较差。为此,本发明提供一种驱动方便、适应性强、价格低廉以及能够适应复杂多变的抓取任务的用于神经康复的柔性驱动手掌外骨骼机器人,能帮助残疾人正常生活以及正常地融入社会。
技术实现要素:
4.本发明的目的是克服现有技术中存在的刚性机构驱动稳定性差、比较笨重以及不能根据抓取物体的形状做出不同抓握动作的缺陷,提供一种驱动方便、适应性强、价格低廉以及能够适应复杂多变抓取任务的用于神经康复的柔性驱动手掌外骨骼机器人。
5.本发明解决其技术问题所采用的技术方案是:
6.一种用于神经康复的柔性驱动手掌外骨骼机器人,其特征在于:包括小臂支架、与所述小臂支架连接的手掌组件、连接在所述手掌组件上的拇指组件、与所述手掌组件柔性连接的第一手指组件、与所述手掌组件柔性连接的小指组件以及安装在所述小臂支架上的柔性驱动组件;所述柔性驱动组件包括安装在所述小臂支架上的柔性驱动电机、与所述柔性驱动电机输出轴同轴连接的第一光轴、套设在所述第一光轴末端的第二光轴、两端分别固定在所述第一光轴和第二光轴上的扭簧、与所述第二光轴同轴连接有第一锥齿轮、与第一锥齿轮啮合的第二锥齿轮、作为第二锥齿轮的转轴的齿轮轴、安装在所述齿轮轴上的主动传动组件以及在所述主动传动组件周围与其传动连接的四个从动传动组件,所述主动传动组件和从动传动组件的输出端均固定连接一驱动绳的一端,五个所述驱动绳的另一端分
别连接至所述拇指组件、三个第一手指组件和小指组件上;所述柔性驱动电机的转轴上安装有第一编码器,所述齿轮轴上安装有第二编码器。
7.进一步地,所述第一光轴的端部具有第一限位挡板,所述第二光轴的末端具有第二限位挡板,所述扭簧设置在所述第一限位挡板和第二限位挡板之间。
8.进一步地,所述主动传动组件包括同轴安装在所述齿轮轴上的主动齿轮和主动滑轮,所述从动传动组件包括与所述主动齿轮外啮合的从动齿轮以及与所述从动齿轮同轴安装的从动滑轮。
9.进一步地,所述手掌组件包括手掌安装板,所述手掌安装板的正面并排安装有五个用来对驱动绳导向的导向轮,所述手掌安装板与所述小臂支架之间通过五个并列设置的小臂线束管连接,五根驱动绳分别送五个小臂线束管内穿过。
10.进一步地,所述拇指组件包括:安装在所述手掌组件上的拇指安装部、与所述拇指安装部转动连接的u型连杆、通过第一拇指轴与所述u型连杆开口端转动连接的h型连杆、通过第二拇指轴与所述h型连杆的末端转动连接的第一拇指指背、与所述第一拇指指背的末端连接的拇指丝杆、螺纹连接在所述拇指丝杆上的拇指抬背连杆、通过第三拇指轴与所述拇指抬背连杆转动连接的第二拇指指背以及与所述第二拇指指背转动连接的拇指套;所述第一拇指轴的外端固定连接有拇指垫片,所述拇指垫片上设置有拇指软管。
11.进一步地,所述第一手指组件包括:手指指根、通过第一关节轴与所述手指指根转动连接的手指丝杆、螺纹连接在所述手指丝杆上的s型手指连杆、通过第二关节轴与所述s型手指连杆转动连接的第一指背、与所述第一指背转动连接的第二指背以及通过第三关节轴与所述第二指背的末端转动连接的手指指尖。
12.进一步地,所述小指组件包括:小指指根、通过第四关节轴与所述小指指根转动连接的小指丝杆、螺纹连接在所述小指丝杆上的s型小指连杆、通过第五关节轴与所述s型小指连杆转动连接的小指指背以及通过第六关节轴与所述小指指背的末端转动连接的小指指尖。
13.进一步地,所述拇指组件、第一手指组件和小指组件的外侧固定连接有用来对驱动绳收放的收放组件;所述收放组件包括:两相对设置的支撑架,两所述支撑架之间的中心位置通过轴承转动连接有传动轮,所述传动轮外周设置多个压绳轮,所述压绳轮通过轴承转动安装在两支撑架上,其中两个相邻压绳轮之间还固定连接有绕线轮,驱动绳从一个绕线轮绕入,然后依次绕过传动轮,最后驱动绳的端部固定在另一个绕线轮上,所述压绳轮保证驱动绳不从传动轮上脱出。
14.进一步地,所述第一手指组件和所述小指组件通过线束软管与所述手掌安装板连接。
15.更进一步地,所述小臂支架的上连接有小臂绷带,所述手掌组件上连接有手掌绷带,所述第一手指组件、小指组件和拇指组件上连接有手指绷带。
16.本发明的一种用于神经康复的柔性驱动手掌外骨骼机器人的有益效果是:
17.1、本发明的驱动绳由于扭簧的作用始终处于张紧的状态,通过患者在抓取物品时手指的弯曲动作带动驱动绳拉动从动传动组件转动、进而带动主动传动组件转动,通过第二编码器能够测量齿轮轴的转动角度,齿轮轴通过锥齿轮传动带动第二光轴转动,进而使扭簧扭转角度,第二编码器也即检测出了扭簧的转动角度,并结合扭簧的刚度和扭簧变化
量,用胡克定律计算出抓取物品所需要的转矩,最后驱动电机转动输出扭矩,使患者能够轻而易举地抓取物品。释放物品时,各机构状态和抓取时相同,整个抓取或释放过程非常迅速,延时低。
18.2、本发明突破传统的驱动方式,采用驱动绳驱动,使整个外骨骼机器人轻巧方便,经济实惠而且拆卸方便,尤其适合家庭和个人使用,既可为患者提供简单有效的康复训练,又可降低临床医生的工作量和成本。
19.3、本发明的收放组件在进行收/放驱动绳时,传动轮和周围的压绳轮会不停地挤压驱动绳,保证驱动绳不会脱离传动轮,使驱动绳从专门设置的出口导出,从而能够有效控制收放精度,能够抓握不同形状的物体,适用范围广。
附图说明
20.下面结合附图和具体实施方式对本发明作进一步详细的说明。
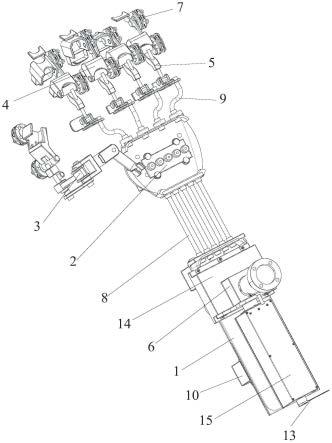
21.图1是本发明实施例的整体结构图;
22.图2是本发明实施例的柔性驱动组件部分结构剖视图;
23.图3是图2中a部放大图;
24.图4是本发明实施例的主动传动组件与从动传动组件部分结构剖视图;
25.图5是本发明实施例的主动传动组件与从动传动组件立体结构图;
26.图6是本发明实施例的手掌组件结构图;
27.图7是本发明实施例的拇指组件结构图;
28.图8是本发明实施例的第一手指组件结构图;
29.图9是本发明实施例的小指组件结构图;
30.图10是本发明实施例的收放组件结构图;
31.图中:1、小臂支架,2、手掌组件,21、手掌安装板,22、滑轮支架,23、导向轮,3、拇指组件,30、拇指安装部,31、u型连杆,32、第一拇指轴,33、h型连杆,34、拇指轴,35、第一拇指指背,36、拇指丝杆,37、拇指抬背连杆,38、第三拇指轴,39、第二拇指指背,310、拇指套,311、拇指垫片,312、拇指软管,4、第一手指组件,40、手指指根,41、第一关节轴,42、手指丝杆,43、s型手指连杆,44、第二关节轴,45、第一指背,46、第二指背,47、第三关节轴,48、手指指尖,5、小指组件,50、小指指根,51、第四关节轴,52、小指丝杆,53、s型小指连杆,54、第五关节轴,55、小指指背,56、第六关节轴,57、小指指尖,6、柔性驱动组件,60、柔性驱动电机,61、第一光轴,611、第一限位挡板,62、第二光轴,621、第二限位挡板,63、扭簧,64、第一锥齿轮,65、第二锥齿轮,你67、齿轮轴,68、主动传动组件,681、主动齿轮,682、主动滑轮,69、从动传动组件,691、从动齿轮,692、从动滑轮,7、收放组件,70、支撑架,71、绕线轮,72、传动轮,74、压绳轮,8、小臂线束管,9、线束软管,10、小臂绷带,11、手掌绷带,11、手指绑带,13、第一编码器,14、保护罩,15、外壳,16、第二编码器。
具体实施方式
32.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
33.如图1-图10所示的本发明的一种用于神经康复的柔性驱动手掌外骨骼机器人的
具体实施例,包括小臂支架1、与小臂支架1连接的手掌组件2、连接在手掌组件2上的拇指组件3、与手掌组件2柔性连接的第一手指组件4、与手掌组件2柔性连接的小指组件5以及安装在小臂支架1上的柔性驱动组件6。
34.其中小臂支架1的背面连接有小臂绷带10,手掌组件2上连接有手掌绷带11,第一手指组件4、小指组件5和拇指组件3上连接有手指绷带12。小臂绷带10、手掌绷带11和手指绷带12分别将小臂、手掌和手掌与本实施例的外骨骼机器人连接。
35.参见图2-图5,柔性驱动组件6包括安装在小臂支架1上的柔性驱动电机60、与柔性驱动电机60输出轴同轴连接的第一光轴61、套设在第一光轴61末端的第二光轴62、两端分别固定在第一光轴61和第二光轴62上的扭簧63、与第二光轴62同轴连接有第一锥齿轮64、与第一锥齿轮64啮合的第二锥齿轮65、作为第二锥齿轮65的转轴的齿轮轴67、安装在齿轮轴67上的主动传动组件68以及在主动传动组件68周围与其传动连接的四个从动传动组件69,主动传动组件68和从动传动组件69的输出端均固定连接一驱动绳的一端,五个驱动绳的另一端分别连接至拇指组件3、三个第一手指组件4和小指组件5上;柔性驱动电机61的转轴上安装有第一编码器13,齿轮轴67上安装有第二编码器16。其中柔性驱动电机60的输出轴通过联轴器连接第一光轴61,第一光轴61的端部具有第一限位挡板611,第二光轴62的末端具有第二限位挡板621,扭簧63设置在第一限位挡板611和第二限位挡板621之间。
36.本实施例中,主动传动组件68包括同轴安装在齿轮轴67上的主动齿轮681和主动滑轮682,从动传动组件69包括与主动齿轮681外啮合的从动齿轮691以及与从动齿轮691同轴安装的从动滑轮692。本实施例具有主动齿轮681和行星啮合于主动齿轮外周的四个从动齿轮691,由于主动齿轮681和从动齿轮691的转向相反,所以驱动绳在主动滑轮682和从动滑轮692上的缠绕方向相反,这样能够实现五根驱动绳同时收/放的目的。
37.本实施例中的驱动绳可以为普通的尼龙绳也可以为柔性金属丝等材料。
38.主动传动组件68和从动传动组件69外设置有保护罩14,保护罩14内部设计套筒顶紧齿轮轴67上的轴承,实现齿轮轴67的轴向定位,保护罩14靠近小臂线束管8的一端开设有五个供驱动绳通过的孔。
39.柔性驱动电机60外设置有外壳15,可以密封防尘,既能够对柔性驱动组件6起到保护作用,而且看起来更加美观。
40.参见图6,手掌组件2包括手掌安装板21,手掌安装板21的正面并排安装有五个用来对驱动绳导向的导向轮23,手掌安装板21与小臂支架1之间通过五个并排设置的小臂线束管8连接,五根驱动绳分别送五个小臂线束管8内穿过。手掌安装板21的背面固定有手掌绷带11,可以将手掌组件2固定在患者手掌上。手掌安装板21的正面还固定安装有滑轮支架22,五个并排设置的导向轮23安装在滑轮支架22上。通过导向轮23对驱动绳的导向作用,确保驱动绳在传动过程中的准确性。
41.如图7所示,拇指组件3包括:安装在手掌组件2上的拇指安装部30、与拇指安装部30转动连接的u型连杆31、通过第一拇指轴32与u型连杆31开口端转动连接的h型连杆33、通过第二拇指轴34与h型连杆33的末端转动连接的第一拇指指背35、与第一拇指指背35的末端连接的拇指丝杆36、螺纹连接在拇指丝杆36上的拇指抬背连杆37、通过第三拇指轴38与拇指抬背连杆37转动连接的第二拇指指背39以及与第二拇指指背39转动连接的拇指套310;第一拇指轴32的外端固定连接有拇指垫片311,拇指垫片311上设置有拇指软管312。
42.第三拇指轴38外端和拇指套310的外侧分别设置一个收放组件7;驱动绳的一端固定缠绕在一个从动滑轮上,然后依次穿过小臂线束管8,绕过导向轮23,穿过拇指软管312,最后再依次绕过拇指组件3上的两个收放组件,驱动绳的另一端固定在拇指套310外侧的收放组件7上。
43.第一手指组件4和小指组件5通过线束软管9与手掌安装板21连接。
44.参见图8,第一手指组件4包括:手指指根40、通过第一关节轴41与手指指根40转动连接的手指丝杆42、螺纹连接在手指丝杆42上的s型手指连杆43、通过第二关节轴44与s型手指连杆43转动连接的第一指背45、与第一指背45转动连接的第二指背46以及通过第三关节轴47与第二指背46的末端转动连接的手指指尖48。
45.第一指背45和第二指背46的外侧分别安装有一个收放组件7;两收放组件7位于患者手指的同一侧,驱动绳的一端固定缠绕在其中一个从动滑轮692上,然后依次穿过小臂线束管8,绕过导向轮23,再从线束软管9中穿过,最后依次绕过两个收放组件7,驱动绳的另一端固定在第二指背46外侧的收放组件上。
46.通过s型手指连杆43在手指丝杆42上的转动调节第一关节轴41和第二关节轴44的距离,以适应不同患者的不同长度的手指。
47.第一手指组件4通过s型手指连杆43进行手指弯曲伸直时驱动绳长度的调整,手掌各个手指指端通过驱动绳传动带动外骨骼运动,柔性驱动组件6与指端通过滑轮23实现换向。
48.如图9所示,小指组件5包括:小指指根50、通过第四关节轴51与小指指根50转动连接的小指丝杆52、螺纹连接在小指丝杆52上的s型小指连杆53、通过第五关节轴54与s型小指连杆53转动连接的小指指背55以及通过第六关节轴56与小指指背55的末端转动连接的小指指尖57。
49.第五关节轴54的外侧和小指指背55的外侧分别安装一收放组件7。
50.如图10所示,收放组件7包括:两相对设置的支撑架70,两支撑架70之间的中心位置通过轴承转动连接有传动轮72,传动轮72外周设置多个压绳轮74,压绳轮74通过轴承转动安装在两支撑架上,其中两个相邻压绳轮74之间还固定连接有绕线轮71,驱动绳从一个绕线轮71绕入,然后依次绕过传动轮72,最后驱动绳的端部固定在另一个绕线轮71上,压绳轮74保证驱动绳不从传动轮72上脱出。当进行收/放驱动绳时,传动轮72和周围的压绳轮74会不停地挤压驱动绳,使驱动绳从专门设置的出口导出,从而控制收/放驱动绳精度。
51.工作时,通过小臂绷带10将小臂支架1戴在患者的小臂上,将手掌组件2戴在患者的手掌上,将拇指组件3,第一手指组件4和小指组件5分别相对应的戴在患者的手指上,当患者想要抓取物品时,这时患者的五根手指弯曲,于是拇指组件3、第一手指组件4和小指组件5受到外力的作用,使各个关节轴旋转带动收放组件7转动,此时,一端固定在收放组件7上的驱动绳开始拉长,由于驱动绳的另一端固定在柔性驱动组件6中的主动滑轮682、从动滑轮692上,进而带动主动滑轮682和从动滑轮692旋转,带动齿轮轴67旋转,从而带动第二光轴62旋转,于是,扭簧63在第二光轴62的作用下实现了一定的扭转,通过第二编码器16检测扭簧63转动的角度,并结合扭簧63的刚度和扭簧63变化量,用胡克定律计算出抓取物品所需的转矩,最后柔性驱动组件6中的柔性驱动电机60开始转动,输出扭矩,使患者轻而易举地抓取物品;释放物品时,各个组件的状态与抓取时原理相同,整个过程非常迅速,延时
低。
52.应当理解,以上所描述的具体实施例仅用于解释本发明,并不用于限定本发明。由本发明的精神所引伸出的显而易见的变化或变动仍处于本发明的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
