1.本实用新型涉及一种带有微导管导丝单元的机器人导管系统和医疗系统。
背景技术:
2.cto(英文:chronic total occlusion,chronischer totalverschluss慢性完全闭塞)是指动脉血管的闭塞,其阻碍了血液越过阻塞物的流动。由此会造成肌肉和生命必要器官的供血不足。cto既可能出现在冠状动脉中也可能出现在外周动脉中,并且会导致严重的病变乃至死亡。cto的原因通常是粥样动脉硬化。
3.为了逆转cto的影响,必须重建血液的顺畅流通。这能够以两种方式实现:或者重新疏通cto,或者如果在解剖学上可行的话,在cto的远侧端部通过旁路重新建立血液流通。在重新疏通时,作为第一步必须借助医疗设备、例如导丝穿过cto。在图1中示出带有栓塞(okklusion,或者说闭塞部位)2的血管1,其中,带有导丝4的(微)导管3引入该血管中。cto可能由软质或硬质的斑块构成。通常可以借助特殊的cto导丝良好地穿过软质的斑块。随后可以推入球囊导管,通过扩张扩大狭窄部,并且可能还额外地利用支架使增大后的、在理想情况下健康的血管直径稳定化。然而如果斑块已经在血管中存在多个月或者多年,则斑块发生钙化并且纤维化,因此几乎不能或者需要太长时间来将导丝穿过cto而不损伤或刺穿血管壁。即便是有经验的介入治疗医师或心脏病专家也需要多个小时以通过可能存在的微通道来穿越钙化的cto或者钻出穿孔。对于极硬的cto而言,通常使用特别硬的导丝,然而该导丝随之具有的用以穿越微通道的灵活性较小。如果根本无法在cto中钻出孔,则必须设置旁路,然而这产生更高的并发症发生率和更高的费用。
技术实现要素:
4.本实用新型所要解决的技术问题在于,提供一种设备,该设备使得介入治疗医师能够快速地且以针对血管尽可能低的风险将cto钻穿。
5.根据本实用新型,所述技术问题通过一种带有微导管导丝单元的机器人导管系统并且通过医疗系统解决。
6.机器人导管系统带有用于在中空器官中使用的微导管导丝单元,其中,所述微导管导丝单元具有带有远侧端部和近侧端部的导管体和至少两个带有导丝尖端的导丝,其中,第一导丝和/或所述第一导丝的尖端具有比第二导丝和/或所述第二导丝的尖端更高的刚性,并且其中,所述第一导丝和第二导丝导引穿过导管体并且布置为,使得第一导丝的尖端和第二导丝的尖端能够相互无关地沿着第一导丝和第二导丝的纵向轴线推进和/或回拉,并且其中,所述机器人导管系统具有至少一个控制单元和机器人辅助的驱动系统,所述驱动系统带有驱动器和驱动机构,其中,所述驱动系统尤其在两个导丝的近侧端部的区域中与所述导丝的至少一个能松脱地耦连,并且其中,所述驱动系统构造用于使所述两个导丝中的至少一个导丝与另一个导丝无关地沿轴向自动或半自动地推进和回拉。
7.医疗系统具有根据本实用新型的机器人导管系统以及医疗成像设备、尤其是x射
线设备。
8.包括在机器人导管系统中的用于在中空器官中使用的微导管导丝单元具有带有远侧端部和近侧端部的导管体和至少两个带有导丝尖端的导丝,其中,第一导丝和/或所述第一导丝的尖端具有比第二导丝和/或所述第二导丝的尖端更高的刚性,并且其中,所述第一导丝和第二导丝导引穿过导管体并且布置为,使得第一导丝的尖端和第二导丝的尖端能够相互无关地沿着其纵向轴线推进(vorschiebbar,或者说前移)和/或回拉(r
ü
ckziehbar),尤其能够附加地旋转。这种带有两个刚性不同的导丝的微导管导丝单元能够以简单的方式同时用于对栓塞(例如cto)的探查(例如利用不太硬的导丝穿过微通道)并且用于在栓塞中钻孔(例如利用更硬的导丝)。通过该方式能够不更换设备地并且由此明显更快速地探索或者钻出穿过栓塞的路径。两个导丝的相互无关的可移动性所具有的优点在于,导丝能够分别根据需要被交替使用,并且当相应另一个导丝能够回拉时不妨碍对方。然而两个导丝共同地至少部分地导引穿过导管体,并且由此也能够共同被导航至其在空腔器官中的使用位置。
9.所述导管体可以具有至少两个通道或者至少两个内腔,并且每个导丝至少部分地分别(或者说单独地)各布置在一个通道或者内腔中。可以通过该方式,两个导丝不会相互钩缠,不妨碍对方,相互间不产生摩擦,并且由此能够始终可靠地相互无关(或者说彼此独立)地使用。
10.两个导丝和/或尖端的刚性尤其可以相差至少1.5倍、尤其至少两倍。通过该方式确保两个导丝针对不同目的(例如对于不太硬的导丝来说是探查并且对于较硬的导丝来说是钻孔)的可使用性。导丝的刚性可以例如通过不同的厚度、材料属性(例如硬度)或结构(例如芯材、涂层)实现。
11.微导管导丝单元可选地可以附加地具有至少一个另外的(例如第三)导丝。也可以设置多个导丝。所述导丝可以全都具有不同的性质、尤其刚性,或者冗余地类似于前两种导丝中的一种。
12.根据本实用新型的带有微导管导丝单元的机器人导管系统具有至少一个控制单元和带有驱动器和驱动机构的机器人辅助的驱动系统,其中,所述驱动系统尤其在两个导丝的近侧端部的区域中与至少一个导丝可松脱地耦连,并且其中,所述驱动系统构造用于使所述两个导丝中的至少一个导丝与另一个导丝无关地沿轴向自动或半自动地推进和回拉和/或还额外地旋转式运动。
13.机器人导管系统原则上是已知的,例如从专利文献ep3406291b1中已知,借助所述机器人导管系统能够实现对象、例如导管和/或导丝在患者的空腔器官中的(半)自动推进。如果这种机器人导管系统与上述微导管导丝单元耦连并且设计用于使其运动,那么能够增加根据本实用新型的微导管导丝单元的优点。机器人辅助的驱动系统和控制单元布置在患者身体外部,而微导管导丝单元例如通过导入鞘在进入点处导入患者的中空器官中,并且在检查或治疗情况下至少部分地处于中空器官中。借助这种根据本实用新型的机器人导管系统能够快速地且对于患者风险特别低地治疗患者空腔器官中的栓塞。
14.机器人辅助的驱动系统例如与更硬的第一导丝耦连,这例如通过第一导丝以其近侧端部部分地与驱动机构啮合实现。这可以例如由此实现,即驱动系统具有盒形件,导丝导引穿过所述盒形件并且与驱动机构的一个或多个执行器运动耦连。由此可以实现导丝在中
空器官中的推进和回拉运动以及额外地实现旋转运动。所述运动由控制单元操控。控制单元可以被使用者例如远程地操作,例如通过诸如输入区、按键或杠杆之类的操作单元操作。还可以存在全自动控制装置,所述全自动控制装置例如使用事先规划的路径或者基于参数自动地进行操控和调节。
15.通过有利的方式还可以将导管体与机器人辅助的驱动系统可松脱地耦连,其中,所述驱动系统或另外的驱动系统作用使得导管体能够在自动或半自动操控下沿轴向推进和回拉,尤其还能够额外地旋转式运动。半自动操控在此例如也可以理解为能够由操作人员通过输入单元(例如操纵杆、触摸板......)向控制单元传递的操控。
16.根据本实用新型的另一种设计方案,机器人导管系统具有机器人辅助的第一和第二驱动系统,所述驱动系统至少分别带有一个驱动器和一个驱动机构;或者所述机器人导管系统具有机器人辅助的第一驱动系统,其带有两个驱动器和两个驱动机构,其中,每个导丝与机器人辅助的驱动系统之一或与驱动机构之一可松脱地耦连,并且其中,驱动系统或驱动机构构造用于使两个导丝相互无关地自动或半自动地沿轴向推进和回拉,还选择性地额外地旋转式运动。所述两个驱动系统在此能够构成一个结构单元或者相互分隔开地布置。在一个驱动系统具有两个驱动机构和驱动器的情况下,所述驱动机构和驱动器构成一个结构单元。导丝与相应的驱动系统或驱动机构耦连,这例如通过导丝部分地与相应的驱动机构啮合实现。这可以例如由此实现,即两个驱动系统分别具有盒形件,相应的导丝导引穿过所述盒形件并且与驱动机构的一个或多个执行器运动耦连。然而也可以在盒形件中布置两个驱动机构。总体上可以实现导丝在中空器官中的推进和回拉运动以及额外地也实现旋转运动。两个导丝可以通过该方式半自动或全自动地被操控并且单独地根据需要运动。
17.当存在多个导丝(三个或更多个)时,还可以存在多个机器人辅助的驱动系统或者存在带有多个驱动器和驱动机构的一个机器人辅助的驱动系统。
18.根据本实用新型的另一种设计方案,机器人辅助的第一驱动系统或第一驱动机构与第一导丝耦连,并且构造用于尤其自动地驱动第一(更硬的)导丝,使得第一导丝以快速的次序实施多个短行程的(kurzhubig)、交替的推进和回拉运动,由此使推进运动能够将力施加在中空器官中的对象、尤其是栓塞上。更硬的导丝通过该方式发挥像冲击钻或凿子那样的作用,该导丝击打在尤其硬化的栓塞上并且能够通过该方式在栓塞中钻出路径。各个运动的速度和行程可以根据导丝的单独的刚性和栓塞的硬度调整适配。那么在此例如可以使用从例如1hz至1000hz的频率和从例如0.1mm至1mm的行程。
19.根据本实用新型的另一种设计方案,所述机器人辅助的第一驱动系统与第一导丝耦连,并且所述第二驱动系统与第二导丝耦连,并且机器人导管系统构造用于将第二导丝在中空器官内部推进至栓塞,随后将第一导丝推进至栓塞,并且以快速的次序实施多个短行程的、交替的推进和回拉运动,由此将力施加在栓塞上。这种工作流程的优点在于,不太硬(或者说刚性较小)的导丝例如能够首先在较软的栓塞或微通道中探索出路径。所述不太硬的导丝在此发挥一种“路径探查丝”的作用。其推进在此可以手动、自动或半自动地实现,为检查位置可以设置例如成像装置。如果不太硬的导丝因微通道的硬化或缺少微通道而撞击在其边界上,则将更硬的导丝投入使用,更硬的导丝随即发挥冲击钻的作用并且钻穿栓塞的较硬部分。对硬化的狭窄部位的探测可以例如借助扭矩测量或以光学方式由成像装置确定。随即可以将更硬的导丝推至狭窄部位,并且可选地将不太硬的导丝回拉,随后实施多
个快速的行程。例如在一定数量的行程之后或在一定的时间段或路程之后则对狭窄部位进行检查。这种检查也可以实时地进行,例如通过成像装置进行。随即根据结果又使用不太硬的或者继续使用较硬的导丝。
20.根据本实用新型的医疗系统具有机器人导管系统以及医疗成像设备,例如x射线设备、计算机断层x射线设备、磁共振成像设备、超声波设备等。成像设备尤其用于监控介入式治疗、例如用于去除栓塞的进展。
21.根据本实用新型的一种设计方案,所述医疗系统还具有用于探测中空器官中的栓塞的传感器。所述传感器尤其通过扭矩传感器构成,所述扭矩传感器例如布置在机器人辅助的第二驱动系统中,并且根据第二导丝的推进特性(vorschubverhalten)探测栓塞。作为备选,也可以借助成像、也就是说利用成像设备或借助其它方法探测栓塞。
附图说明
22.本实用新型以及本实用新型的技术特征的其它有利的设计方案在以下根据附图中的示意性示出的实施例来详细阐述,并非由此将本实用新型局限于所述实施例。在附图中:
23.图1示出患者的血管的视图,其带有栓塞和已导入的已知的(微)导管导丝单元;
24.图2示出微导管导丝单元的视图,其带有两个性质、尤其是刚性不同的导丝;
25.图3示出带有根据本实用新型的机器人导管系统的医疗系统,该机器人导管系统带有一个驱动系统;
26.图4示出另一种根据本实用新型的机器人导管系统的视图,其带有两个分隔开地布置的驱动系统;
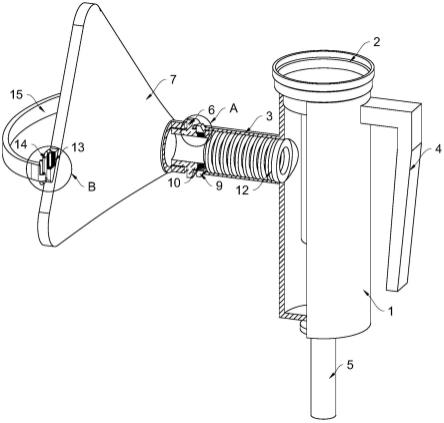
27.图5示出与单独的导丝耦连的驱动系统的视图;
28.图6示出可与两个导丝耦连的驱动系统的视图;并且
29.图7示出适合使用机器人导管系统的方法的步骤的流程。
具体实施方式
30.在图2中示出用于在患者的中空器官(例如脉管或脉管系统)中使用的微导管导丝单元5,该微导管导丝单元具有带有远侧端部11和近侧端部12的导管体9和带有导丝尖端8.1;8.2的至少两个导丝4.1;4.2。在此,第一导丝4.1和第二导丝4.2导引穿过导管体9,其中,第一导丝4.1布置在第一通道6.1中,并且第二导丝4.2布置在第二通道6.2中,并且能够将第一导丝尖端8.1和第二导丝尖端8.2推进超出导管体9的远侧端部11和重新回拉。导丝导引穿过通道并且布置为,使得导丝或导丝尖端能够相互无关地沿着其纵向轴线推进和重新回拉。同时导丝还可以附加地相互无关地旋转式运动,这确保了穿过中空器官中的弯曲部的导航。微导管导丝单元5还能够以其整体平移式和/或旋转式地向前运动,以便导航进入中空器官中。
31.第一导丝4.1和/或第一导丝4.1的第一导丝尖端8.1在此具有比第二导丝4.2和/或第二导丝的第二导丝尖端8.2更高的刚性。由此可能特别有利的是,两个导丝和/或导丝尖端的刚性相差至少1.5倍或者甚至两倍。通过该方式使得两个导丝针对不同目的(例如对于不太硬的导丝来说是探查并且对于较硬的导丝来说是钻孔)的可使用性是特别有效的。
32.导丝的刚性可以例如通过不同的厚度、材料属性(例如硬度)或结构(例如芯材、涂层)实现。所述导丝可以、但并非必须是厚度不同的,而且导丝的尖端可以、但并非必须是尖锐程度不同的。对于导丝来说尤其关键的是抗弯刚度。所述抗弯刚度由弹性模量和面积惯性矩组成。作为导丝可以使用全部商业上通用的标准导丝,例如pilot50、asahi gaia second或者asahi confianza作为硬质导丝。导丝的通常厚度大约为0.26-0.36mm。导丝也可以更厚或更薄。一些导丝可以通过预处理或涂层变得亲水,已知的涂层例如是特氟龙。
33.还可以在微导管导丝单元5中额外地布置另外的导丝,尤其将其布置在另外的通道中并且同样能够独立地运动。这种另外的导丝可以例如具有更剧烈弯曲的导丝尖端,所述导丝尖端构造用于穿越例如剧烈的弯曲部(分岔、间质、左心房等)。
34.如果所述微导管导丝单元5被置入中空器官中、例如被置入患者的脉管系统中,则微导管导丝单元能够以简单的方式同时用于对栓塞(例如cto)的探查(例如利用不太硬的导丝穿过微通道)并且也用于在栓塞中钻孔(例如利用更硬的导丝)。通过该方式能够不更换设备地并且由此明显更快速地探索或者钻出穿过栓塞的路径。不太硬的第二导丝4.2在此是“路径探查丝”,较硬的第一导丝4.1是“冲击钻”。两个导丝4.1;4.2是可相互移动的。那么也就是说在介入期间首先可以使用不太硬的第二导丝,以便探索在栓塞(cto或其它狭窄部位)中的微通道。如果不能再通过第二导丝实现前进,则推入第一导丝但不接触,将第二导丝回拉,并且随后利用最小的撞击和回拉运动将较硬的第一导丝来回移动,以便进入栓塞中。这可以例如手动实施。
35.以下描述用于半自动或自动推进导丝的设备。半自动操控在此例如也可以理解为能够由操作人员通过输入单元(例如操纵杆、触摸板......)向控制单元传递的操控。在图3中示出带有微导管导丝单元5和至少一个机器人辅助的驱动系统7和控制单元10的机器人导管系统。机器人辅助的驱动系统7具备至少一个驱动器和至少一个驱动机构(其在图5和图6中更详细地示出),并且与至少一个导丝4.1;4.2可松脱地耦连。此外,驱动系统7构造用于使两个导丝的至少一个相对于另一个导丝无关地自动或半自动地沿轴向推进和回拉并且优选还旋转式运动。机器人导管系统原则上是已知的,例如corindus inc.公司的机器人导管系统,例如参见专利文献ep3406291b1,借助所述机器人导管系统能够实现(微)导管和/或导丝在患者的空腔器官中的(半)自动推进。
36.在此的机器人导管系统可以例如将两个导丝4.1和4.2相互无关地自动或半自动地沿轴向推进和回拉并且优选附加地旋转式运动。为此,要么一个驱动系统7具有至少两个驱动机构和至少两个驱动器,其中,导丝分别与至少一个驱动机构可松脱地耦连,要么存在至少两个驱动系统7.1和7.2,这两个驱动系统中的每一个都具有至少一个驱动机构和驱动器,并且分别与各一个导丝可松脱地耦连,参见图4。
37.在图5中示出第一驱动系统7.1,所述第一驱动系统与单独的、在此情况下的第一导丝4.1耦连。该驱动系统具有驱动系统基础元件24和(例如可更换的)盒元件22。此外,驱动系统基础元件24可以具有至少一个、例如三个执行器元件23、例如电动机,其中,控制单元10构造用于控制所述至少一个执行器元件23。盒元件22能够(例如机械和/或电磁和/或气动地)耦连在驱动系统基础元件24上并且尤其耦连在至少一个执行器元件23上。在此,盒元件22可以具有至少一个传递元件25,所述传递元件能够通过盒元件22与驱动系统基础元件24之间的耦连而运动。由此所述至少一个传递元件25能够运动耦连
(bewegungsgekoppelt)到至少一个执行器元件23上。由此,传递元件25构造用于将执行器元件23的运动传递至第一导丝4.1,从而使第一导丝平移式运动和/或围绕纵向延伸方向旋转。至少一个传递元件25可以例如具有滚动体和/或辊子和/或挡板。第二驱动系统7.2可以与第一驱动系统7.1结构相同地构造,并且与第二导丝4.2耦连以实现其运动。两个驱动系统7.1和7.2能够通过控制单元操控,其中,可以独立地实现调节。
38.在具有两个驱动机构和驱动器的唯一一个驱动系统7的情况下,驱动机构和驱动器构成一个结构单元,参见图6。驱动系统基础元件24具有至少两个、例如六个执行器元件23,并且控制单元10构造用于控制所述至少两个执行器元件23。盒元件22能够耦连在驱动系统基础元件24并且尤其是至少两个执行器元件23上,方式为盒元件22具有至少两个传递元件25,所述传递元件能够通过盒元件22与驱动系统基础元件24之间的耦连而运动。由此,传递元件25构造用于将执行器元件23的运动传递至两个导丝4.1和4.2,从而使这两个导丝相互无关地平移式运动和/或围绕纵向延伸方向旋转。
39.一个或多个所述驱动系统7;7.1;7.2能够固定在固定元件21、例如支架和/或机器人手臂上,并且利用所述机器人手臂又安置在例如患者卧榻19上。
40.在图3中还示出处于患者卧榻19上的患者20,可以对该患者采取介入式手术以重新疏通栓塞(例如cto)。为进行这种手术可以将微导管导丝单元5通过导入鞘在进入点14处导入患者20的中空器官(例如脉管系统)中。
41.此外,可以设置医疗成像设备、例如具有c形臂16的x射线设备15并且连同机器人导管系统一起构成按照本实用新型的医疗系统,在所述x射线设备上布置有x射线源18和x射线探测器17。
42.机器人导管系统的控制单元10可以构造用于自动和/或半自动地操控导丝的运动。在半自动的操控的情况下,控制单元可以例如与一个或多个输入单元相连,通过所述输入单元传输使用者的控制指令,并且随后由控制单元使用该控制指令以操控驱动系统。在全自动控制的情况下,也可以实施事先规划的路径或运动设置。使用者由此可以例如事先在3d体积(例如ct或磁共振)中根据已知的方法实施路径规划。还可以设置额外的调节单元,所述调节单元基于传感器数据(例如有关成像、栓塞的阻力、扭矩的传感器数据)和参数操控导丝并且调节运动。还可以规定,在两个功能性之间(自动和/或半自动地)切换。
43.有利地,机器人辅助的第一驱动系统或第一驱动机构与第一导丝耦连,并且构造用于尤其自动地驱动第一导丝,从而使第一导丝以快速的次序实施多个短行程的、交替的推进和回拉运动。这可以通过控制单元操控。因此该功能可以在必要时由使用者或者自动地激活。推进运动可以由此将力施加在中空器官中的对象、尤其是栓塞上。更硬的导丝通过该方式发挥像冲击钻或凿子那样的作用,该导丝击打在尤其硬化的栓塞上并且能够通过该方式在栓塞中钻出路径。相应的运动的速度和行程可以根据导丝的各自的刚性和栓塞的硬度调整适配。那么在此例如可以使用从例如1hz至1000hz的频率和从例如0.1mm至1mm的行程。
44.机器人导管系统可以构造用于将第二导丝在中空器官内部推进至栓塞,随后将第一导丝推进至栓塞并且在该处以快速的次序实施多个短行程的、交替的推进和回拉运动,由此将力施加在栓塞上。
45.在图7中示出一种能够借助所述机器人导管系统或所述医疗系统半自动或自动实
施的方法。针对该方法,微导管导丝单元5已经被导入患者20的中空器官(例如脉管系统)中,并且例如借助成像将导丝尖端尽可能垂直于障碍物地定位或者在中空器官弯曲的情况下将导丝尖端瞄准栓塞的远侧端部。在第一步骤s1中,不太硬的第二导丝朝栓塞的方向或者在栓塞的区域中通过微通道推进。这可以例如借助成像得到辅助。在第二步骤s2中,探测到不能被非刚性(或者说不太硬)的导丝穿过的栓塞。这可以例如也借助成像或者还通过例如定位在驱动系统或导管系统(例如导丝尖端)上的扭矩传感器26实施。在第三步骤s3中,将更硬的第一导丝推进直至接触,这同样可以例如借助扭矩传感器、借助成像或距离测量实施。随后,能够可选地在第四步骤s4中将第二导丝回拉。随后,在第五步骤s5中通过第一导丝以快速的次序实施多个短行程的、交替的推进和回拉运动,以便钻穿栓塞。该行程可以例如由使用者确定,或者可以由预先训练的机器学习算法基于成像的图像信息、导丝在先前行程中的行为表现(verhalten)或扭矩传感器的值确定相应的下个行程应该为多大。还可以基于成像、传感器或迄今方法的流程的信息推断出栓塞的组织学情况,并且据此确定撞击深度和能量。
46.机器人导管系统可以例如构造用于基于规划好的路径全自动地实施所述方法。机器人导管系统可以构造用于将第二导丝在中空器官内部推进至栓塞,随后将第一导丝推进至栓塞并且在该处以快速的次序实施多个短行程的、交替的推进和回拉运动,由此将力施加在栓塞上。机器人导管系统也可以构造用于根据测得的栓塞阻力使用相应合适的导丝,也就是说在测量到柔和的阻力时使用不太硬的第二导丝,而在测量到硬性阻力时使用刚性(或者说较硬)的第一导丝。
47.本实用新型能够通过以下方式简短汇总:为改善地治疗空腔器官中的栓塞、例如cto(慢性完全闭塞病变),规定了用于在中空器官中使用的微导管导丝单元,其具有带有远侧端部和近侧端部的导管体和至少两个带有导丝尖端的导丝,其中,第一导丝和/或所述第一导丝的尖端具有比第二导丝和/或所述第二导丝的尖端更高的刚性,并且其中,所述第一导丝和第二导丝导引穿过导管体并且布置为,使得第一导丝和第二导丝的尖端能够相互无关地沿着其纵向轴线推进和/或回拉和/或旋转。此外还规定了带有微导管导丝单元的机器人导管系统,所述机器人导管系统具有至少一个控制单元和带有驱动器和驱动机构的机器人辅助的驱动系统,其中,所述驱动系统尤其在两个导丝的近侧端部的区域中与至少一个导丝可松脱地耦连,并且其中,所述驱动系统构造用于使所述两个导丝中的至少一个导丝与另一个导丝无关地沿轴向自动或半自动地推进和回拉并旋转。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。