1.本公开涉及清洁机器人技术领域,尤其涉及一种清洁滚刷及清洁机器人。
背景技术:
2.市面上的清洁机器人大部分都具备清洁和拖地的功能,随着趋势的发展,清洁机器人的功能越来越强大,如清洁机器人采用旋转拖地模组,可以通过拖布对地面进行清洁擦洗。目前,现有清洁机器人采用拖地组件会存在一个较大的问题:机器人在完成清洁后或者回到工作站后,拖布长期处于湿润的状态,容易产生臭味、异味,也容易滋生细菌。
技术实现要素:
3.本公开提出了一种清洁滚刷及清洁机器人,以解决现有技术中清洁机器人的拖布持续处于湿润状态,易产生臭味、异味、滋生细菌的技术问题。
4.为了解决上述技术问题,本公开提出了一种清洁滚刷,包括:
5.滚刷组件,所述滚刷组件的端部设有连接结构,所述滚刷组件通过所述连接结构能够和机器人本体转动相连;
6.至少一个发热体,所述发热体位于所述滚刷组件内。
7.可选地,所述清洁滚刷还包括导热体,所述导热体位于所述滚刷组件内,所述发热体嵌设在所述导热体内。
8.可选地,所述滚刷组件包括套筒和清洁件,其中,套筒为塑胶套筒,所述塑胶套筒套设在所述导热体外,所述塑胶套筒的周面分布有所述清洁件,清洁件可以包括:超细纤维、绒布、毛刷。
9.可选地,所述发热体为发热线,所述发热线对折形成螺旋结构,所述发热线的两端分别延伸至所述滚刷组件的一两端,所述连接结构位于所述滚刷组件的两端与机器人本体进行可滚动连接。
10.可选地,所述发热线包括对折形成的第一部和第二部,所述第一部为直线形,所述第二部为螺旋形,所述第二部绕设在所述第一部外,所述第一部的端部和所述第二部对折后的端部分别延伸至所述滚刷组件的一端。
11.可选地,所述清洁滚刷还包括支撑座、导电环和导电柱,所述支撑座位于所述滚刷组件的一端,所述导电环和所述导电柱均设在所述支撑座的端面,所述导电柱位于所述导电环中,所述第一部的端部和所述导电环电性相连,所述第二部的端部和所述导电柱电性相连;
12.所述滚刷组件两端通过所述导电柱和连接结构分别能够转动架设在所述机器人本体上。
13.可选地,所述清洁滚刷还包括温度传感器和/或湿度传感器,所述温度传感器和/或湿度传感器贴近所述滚刷组件设置,所述温度传感器用于感应所述滚刷组件的温度,所述湿度传感器用于感测滚刷组件的湿度,以调节所述发热体的发热量。
14.可选地,所述滚刷组件的两端分别设有连接结构,两所述连接结构分别和所述发热体的两端电性相连,所述发热体通过所述连接结构能够和所述机器人本体电性相连。
15.本发明还公开了一种清洁机器人,包括机器人本体和上述的清洁滚刷,所述机器人本体内设有容纳腔,所述清洁滚刷的滚刷组件通过所述连接结构转动设在所述容纳腔内。
16.可选地,所述机器人本体包括转动驱动元件和方形夹持头,所述方形夹持头和所述转动驱动元件传动相连,所述方形夹持头位于所述容纳腔内,所述连接结构为方形凹槽,所述方形夹持头和所述方形凹槽传动相连。
17.可选地,所述机器人本体还包括喷水结构,所述喷水结构能够和水箱连通,所述喷水结构上设有喷水孔,所述喷水孔和所述清洁滚刷相对。
18.可选地,所述机器人本体还包括挤压杆,所述挤压杆和所述清洁滚刷并排设置,所述挤压杆能够挤压所述清洁滚刷,以将所述清洁滚刷中的污水挤出。
19.与现有技术相比,本公开的清洁滚刷中,滚刷组件通过机器人本体带动转动以进行清洁和拖地。本公开的清洁滚刷在使用完之后,滚刷组件被浸湿,发热体可以发热,将滚刷组件烘干,避免滚刷组件长期处于湿润状态,避免滚刷组件产生臭味或滋生细菌。
20.本公开的清洁机器人也具有上述优点,在此不再赘述。
附图说明
21.一个或多个实施例通过与之对应的附图进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
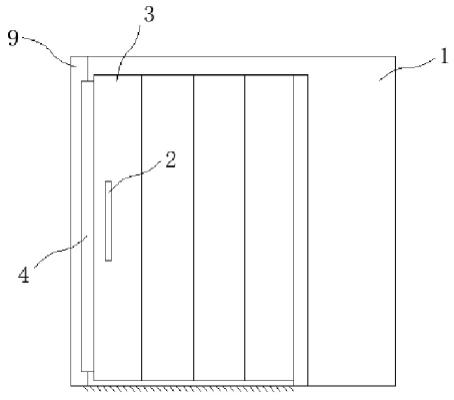
22.图1为本公开一实施例中清洁滚刷的展开图;
23.图2为本公开一实施例中清洁滚刷的爆炸图;
24.图3为本公开另一实施例中清洁滚刷的展开图;
25.图4为本公开一实施例中清洁机器人的结构示意图(清洁滚刷和机器人本体爆炸开);
26.图5为本公开一实施例中滚刷组件的结构示意图;
27.图6为图4第一视角的爆炸图;
28.图7为图4第二视角的爆炸图。
具体实施方式
29.为了便于理解本公开,下面结合附图和具体实施例,对本公开进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明的目的。
30.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本公开的技术领域的技术人员通常理解的含义相同。在本公开的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本公开。本说明书所使用的术语“和/或”包括一个或多个相
关的所列项目的任意的和所有的组合。
31.此外,下面所描述的本公开不同实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
32.请参照图1至图2,一种清洁滚刷100,包括:
33.滚刷组件10,所述滚刷组件10的端部设有连接结构,所述滚刷组件10通过所述连接结构能够和机器人本体200转动相连;
34.至少一个发热体20,所述发热体20位于所述滚刷组件10内。
35.本实施例的清洁滚刷100中,滚刷组件10通过机器人本体200带动转动以进行清洁和拖地。本实施例的清洁滚刷100在使用完之后,滚刷组件10被浸湿,发热体20可以发热,将滚刷组件10烘干,避免滚刷组件10长期处于湿润状态,产生臭味、异味或滋生细菌。
36.在一实施例中,所述清洁滚刷100还包括导热体30,所述导热体30位于所述滚刷组件10内,所述发热体20嵌设在所述导热体30内。具体的,导热体30采用导热塑胶和发热体20注塑一体成型,使导热体30和发热体20之间的连接更加牢固,导热效果更好。进一步优选的,导热塑胶为尼龙导热塑胶,尼龙导热塑胶制成的导热体30具有导热系数高、成本低、加工方便的特点。
37.在一实施例中,所述滚刷组件10包括套筒(图中未画出)和清洁件(图中未画出),优选的,套筒为塑胶套筒,所述塑胶套筒套设在所述导热体30外,所述塑胶套筒的周面分布有所述清洁件,清洁件包括:超细纤维、绒布、刷毛等。塑胶套筒可以较为牢固的固定在导热体30外,清洁件通过塑胶套筒能够比较牢固地粘接固定在导热体30外围上。优选的,导热体30也为套筒形,塑胶套筒和导热体30之间采用胶水进一步粘接,使其连接更加牢固。当然也可以采用其他方式连接。
38.在一实施例中,所述发热体20为发热线,所述发热线对折形成螺旋结构,所述发热线的两端分别延伸至所述滚刷组件10的一端,所述连接结构位于所述滚刷组件10的另一端。发热线可以为柔性的也可以为刚性的,螺旋结构的发热线与导热体30或滚刷组件10之间的接触面积更大,发热面积也更大,加热效率更高。发热线对折后,能够节省容纳空间。
39.在一实施例中,所述发热线包括对折形成的第一部22和第二部24,所述第一部22为直线形,所述第二部24为螺旋形,所述第二部24绕设在所述第一部22外,所述第一部22的端部和所述第二部24的端部分别延伸至所述滚刷组件10的一端。最大程度的增大了发热面积和接触面积,直线形的第一部22和螺旋形的第二部24相结合,使导热体30或滚刷组件10的受热更加均匀。
40.在一实施例中,所述清洁滚刷10还包括支撑座40、导电环50和导电柱60,所述支撑座40位于所述滚刷组件10的一端,所述导电环50和所述导电柱60均设在所述支撑座40的端面,所述导电柱60位于所述导电环50中,所述第一部22的端部和所述导电环50电性相连,所述第二部24的端部和所述导电柱60电性相连。支撑座40用于固定导电环50和导电柱60,具体的,导电环50可以连接电源负极,导电柱60可以连接电源正极,电源负极和电源正极均设在机器人本体200上,滚刷组件10转动时,导电柱60、导电环50也能够分别持续的和电源正极、电源负极连通,不会影响拖地和清洁。当清洁机器人100回到工作站后,还可以通过导电环50、导电柱60和工作站的电源负极、电源正极连接,使发热体20发热烘干滚刷组件10。其中,发热体20的数量可以为一个,也可以为多个。所述滚刷组件10两端通过所述导电柱60和
所述连接结构分别能够转动架设在所述机器人本体200上。清洁、清扫时,使滚刷组件10两端受力更加均衡,清洁效果更好,滚刷组件10的使用寿命更长。
41.在一实施例中,所述清洁滚刷100还包括温度传感器和/或湿度传感器(图中未显示),所述温度传感器和/或湿度传感器贴近所述滚刷组件10设置,所述温度传感器用于感应所述滚刷组件10的温度,所述湿度传感器用于感应所述滚刷组件10的湿度,以调节所述发热体20的发热量。通过温度传感器感应滚刷组件10的温度,然后根据感应到的温度控制发热体20的发热量,能够避免温度过高而烧焦或烧毁滚刷组件10的现象。具体的,温度传感器设在滚刷组件10和导热体30之间。其中,当温度传感器感应到滚刷组件10的温度后,可以通过人工调节发热体20的发热量,也可以采用控制器(图中未显示)等自动控制发热体20的发热量,从而及时的调节滚刷组件10的烘干温度。
42.请参照图3,在一实施例中,所述滚刷组件10的两端分别设有连接结构,两所述连接结构分别和所述发热体20的两端电性相连,所述发热体20通过所述连接结构能够和所述机器人本体200电性相连。具体的,连接结构为触点圈11,滚刷组件10的两端通过触点圈11可以架设在机器人本体200上,机器人本体200可以通过触点圈11驱动滚刷组件10转动,清洁、清扫时,使滚刷组件10两端受力更加均衡,清洁效果更好,滚刷组件10的使用寿命更长。其中,机器人本体200还可以通过触点圈11给发热体20供电,其中一个触点圈11可以连接电源正极,另一个触点圈11可以连接电源负极。发热体20可以为螺旋状,还可以为直线形,或其他形状。
43.请参照图4至图7,本实施例还公开了一种清洁机器人1000,包括机器人本体200和上述的清洁滚刷100,所述机器人本体200内设有容纳腔210,所述清洁滚刷100的滚刷组件10通过所述连接结构转动设在所述容纳腔210内。本实施例的清洁机器人1000也具有上述优点,在此不再赘述。容纳腔210用于容纳清洁滚刷100,清洁机器人1000移动时,清洁滚刷100能够进行清洁和拖地。
44.在一实施例中,所述机器人本体200包括转动驱动元件220和方形夹持头230,所述方形夹持头230和所述转动驱动元件220传动相连,所述方形夹持头230位于所述容纳腔210内,所述连接结构为方形凹槽12,所述方形夹持头230和所述方形凹槽12传动相连。转动驱动元件220包括电机,还可以包括带传动机构,通过设置带传动机构可以避免拖地清洁过程中出现卡死而过载,能够保护电机。当将清洁滚刷100放入容纳腔210后,只要将方形凹槽12卡入方形夹持头230中就可以实现清洁滚刷100和转动驱动元件220的连接,拆装方便。
45.在一实施例中,所述机器人本体200还包括喷水结构240,所述喷水结构240能够和水箱(图中未显示)连通,所述喷水结构240上设有喷水孔242,所述喷水孔242和所述清洁滚刷100的滚刷组件10相对。喷水结构240为喷水管,喷水管和清洁滚刷100并排设置,喷水管连接水箱后,通过喷水孔242能够将清洁滚刷100浸湿,便于拖地。进一步地,喷水管沿其轴向均匀分布有多个喷水孔242,能够均匀的将清洁滚刷100各处浸湿。
46.在一实施例中,所述机器人本体200还包括挤压杆250,所述挤压杆250和所述清洁滚刷100的滚刷组件10并排设置,所述挤压杆250能够挤压所述清洁滚刷100的滚刷组件10,以将所述清洁滚刷100中的污水挤出。当喷水孔242喷水将清洁滚刷100的滚刷组件10浸湿后,清洁滚刷100转动,挤压杆250和清洁滚刷100的滚刷组件10发生挤压,能够将清洁滚刷100的滚刷组件10上的污水挤掉,便于清洁滚刷100进行清洁和拖地。
47.最后应说明的是:以上实施例仅用以说明本公开的技术方案,而非对其限制;在本公开的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本公开的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本公开进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本公开各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。