1.本发明涉及机载合成视景领域,特别地是,一种用于机载合成视景的地形提示实现方法。
背景技术:
2.机载合成视景是一种保障飞机安全性的系统,是为了解决低能见度条件下飞行员无法通过目视感知飞机周围环境而出现的。机载合成视景基于机载传感器提供的经度、纬度、姿态、航向等信息,结合预先储存的地形、障碍物及导航数据库,由计算机实时生成飞机外部的虚拟三维地形场景图像。机载合成视景虽然为飞行员提供了清晰的不受飞机外部环境因素限制的三维地形信息,但它不会提示飞行员其视野中的地形是否会对飞行安全构成威胁。为了增强飞行员对周围地形的感知能力,需要为合成视景设计一种能主动提示危险地形的方法。
技术实现要素:
3.本发明的目的是提供一种用于机载合成视景的地形提示实现方法,在传统的合成视景三维地形显示画面上增加对危险地形的颜色提示,以此增强飞行员感知及规避周围危险地形的能力,提升飞行安全性。
4.为了实现上述目的,本发明的技术方案如下:一种用于机载合成视景的地形提示实现方法,包含有以下步骤,初始化视椎体参数、飞机性能参数、产生地形提示的高度差阈值h
max
及预留处置时间t
res
;更新三维地形场景数据,三维地形场景数据具有地形高程数据及纹理数据;确定地形提示着色域,地形提示着色域包括基本着色域和扩展着色域,基本着色域是一个截头扇形,扇形的圆心角为视椎体在水平面上投影的夹角,半径为预留处置时间与飞机最大巡航速度的乘积;基本着色域的扇形圆心角随着飞机姿态的变化而实时变化;扩展着色域是一个范围固定的近似扇形,其圆心角定义为:以平视时视锥体的水平投影为基础,以视线的水平投影为中线,向两侧扩展水平视场角投影角度的1/4;扩展着色域,其半径为基本着色域半径向外延伸1倍的长度,且扩展着色域不包含半径小于等于基本着色域半径的部分;对投影落于基本着色域内的地形节点,直接通过视点与地形的高度差与设置的阈值之间的关系进行逐点设色,对投影落于扩展着色域内的地形节点,首先计算地形节点与视点位置连线与水平面的夹角,若该夹角大于飞机的最大爬升角,则对该地形节点进行设色。
5.与现有技术相比,本发明的有益效果至少在于:(1)本发明的算法简单,易于实现。(2)本发明所设定的着色区域既考虑到绘制效率未进行全场景计算,也考虑飞机本身的机动性能增加扩展着色域。(3)本发明使合成视景具有直观提示潜在危险地形的功能,使飞行员提前进行相关的操作规避撞山坠地的危险,提升飞行的安全性。
6.除了上面所描述的本发明解决的技术问题、构成技术方案的技术特征以及由这些技术方案的技术特征所带来的有益效果之外,本发明所能解决的其他技术问题、技术方案
中包含的其他技术特征以及这些技术特征带来的有益效果,将结合附图作出进一步详细的说明。
附图说明
7.图1是本发明所述的用于机载合成视景的地形提示实现方法的流程图。
8.图2是本发明所述的视椎体示意图。
9.图3是本发明所述的基本着色域及扩展着色域示意图1。
10.图4是本发明所述的基本着色域及扩展着色域示意图2。
具体实施方式
11.下面通过具体的实施方式结合附图对本发明作进一步详细说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但不构成对本发明的限定。此外,下面所描述的本发明实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
12.请参见图1至4,一种用于机载合成视景的地形提示实现方法。
13.包括以下步骤:
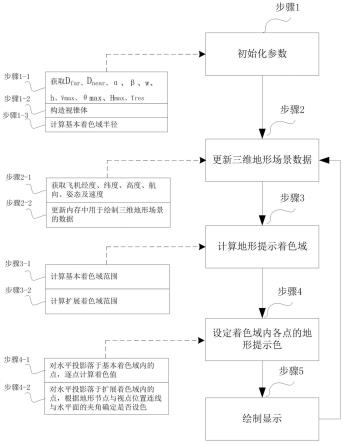
14.步骤1:初始化参数;
15.所述的步骤1,用来初始化参数,初始化参数其需要初始化的参数有,视椎体参数:视野长度d
far
,视点离近裁剪面距离d
near
,水平视场角α,垂直视场角β,屏幕宽w,屏幕高h;飞机性能参数:飞机最大巡航速度v
max
,最大爬升角θ
max
;根据飞机性能设置的参数:产生地形提示的高度差阈值h
max
;预留处置时间t
res
,步骤1包含下列子步骤:
16.步骤1-1,获取参数d
far
,d
near
,α,β,w,h,v
max
,θ
max
,h
max
,t
res
;
17.步骤1-2,根据d
far
,d
near
,α,β,w,h构造用于显示三维地形场景范围的视椎体;
18.步骤1-3,根据v
max
和t
res
计算地形提示基本着色域半径r,本发明的基本着色域半径计算方法如下:
19.r=v
max
*t
res
20.步骤2:更新三维地形场景数据;
21.所述的步骤2,用来更新三维地形场景数据,包括地形高程数据和纹理数据;步骤2包含下列子步骤:
22.步骤2-1,通过机载传感器获取飞机经度、纬度、高度、航向、姿态及速度;
23.步骤2-2,根据飞机的经度、纬度、高度、航向、速度等信息更新内存中用于绘制三维地形场景所需的地形数据块和纹理数据块;此发明中所涉及的纹理数据可以是真实的卫星影像数据,也可以是预先按照一定规则生成的虚拟纹理;
24.步骤3:计算地形提示着色域;
25.所述的步骤3是为了计算地形提示着色域;步骤3包含下列子步骤:
26.步骤3-1,如图3所示,将视椎体投影到水平面上,以视点投影点为原点,r为半径在水平面上作圆,该圆形区域与视椎体投影的重合区域为区域a,为基本着色域;
27.步骤3-2,如图3所示,将平视时的视锥体投影到水平面上,以视线的水平投影为中线,向两侧各扩展水平视场角投影角度的1/4,即构成扩展着色域b的圆心角γ,扩展着色域
半径为基本着色域的半径向外延伸1倍的长度,且扩展着色域不包含半径小于等于基本着色域半径的部分;
28.步骤4:设定着色域内各点的地形提示色;所述的步骤4是为了设定着色域内各点的地形提示色;步骤4包含下列子步骤:
29.步骤4-1,对于水平投影落于基本着色域内的点,逐点计算当前视点位置h
view
与地形高度h
terrain
之间的差值δh,即δh=h
view-h
terrain
,若视点位置与地形的距离大于着色阈值h
max
,则不进行着色,显示其本身的纹理像素pixel(r0,g0,b0,255),否则按照下面的定义进行设色:
[0030][0031]
步骤4-2,对于水平面投影落于扩展着色域内的点,逐点计算地形节点与视点位置的连线与水平面的夹角,若该夹角小于飞机的最大爬升角,则不进行着色,显示其本身的纹理像素pixel(r0,g0,b0,255),否则按照下面的定义进行设色:
[0032][0033]
步骤5:绘制显示;
[0034]
步骤6:返回步骤2。
[0035]
所述的步骤6是将前面计算的结果渲染并显示出来;步骤2到步骤6完成了一帧的计算和绘制,后续工作将会不断重复这个过程。
[0036]
以上仅表达了本发明的实施方式,其描述较为具体和详细,但且不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发
明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。