1.本发明涉及作业机械。
背景技术:
2.对于工程机械等作业机械,以作业效率提高为目的,被要求应对应用了信息化施工等iot技术的高度施工功能。另一方面,作业机械由于保养期间长,需要基于出厂时搭载的控制装置以及车载通信网络而使施工功能高度化。因此,对于控制装置,必须经由通信网络与外部设备和信息基础设施连接,使功能提高。
3.目前,作业机械的自动化正在发展,随着使用机械自身的传感器和执行机构进行的自律作业增加,相对于机身的个体差异、和动作方式及环境进行调整和设定的机会增大,且伴随功能的高度化,应调整和设定的参数数量也增大,变得复杂化。
4.作业机械的操作者(操作员)难以实施全部这些调整和设定,基于专员进行的维护服务成为必须,但在以往的将专员派遣至现场的方法中,为了调整和设定场所内的所有作业机械,需要消耗庞大的人工和时间。因此,远程执行维护服务的远程服务变得不可欠缺。
5.然而,在现状的远程服务中,由于仅通过操作员的判断来开始远程服务,所以会因机身的作业状态和环境要因而发生中断和重试,产生大量的时间损耗。而且,该时间损耗直接导致作业机械的非作业时间的增加。因此,为了谋取在作业机械的运用中为最重要事项的作业效率提高,必须在尽可能短的时间完成远程服务。
6.为了削减远程服务的中断和重试,在短时间执行,需要将由控制装置收集和利用的大量数据由车载通信网络无停滞传送,且需要通过卫星通信和移动无线等车外通信网络向场所外部无停滞传送。
7.而且,将作业机械设为恰当的动作状态、和使在远程方面的服务对应的专员处于能够推导出的状态,也是重要的。
8.作为这种远程服务的以往技术,例如已知日本特开平11-134027号公报。以往技术具有各移动机械上的顺序管理员、和用于根据移动机械的状态而产生服务要求信号的、设于各移动机械上的服务管理员。而且,系统具有用于确立向服务资源的访问并进行控制的资源管理员,资源管理员接收服务要求信号,作为各移动机械的状态的功能而对移动机械允许向服务资源的访问。
9.现有技术文献
10.专利文献
11.专利文献1:日本特开11-134027号公报
技术实现要素:
12.但是,在专利文献1记载的技术中,没有考虑车载通信网络、以及车外通信网络的通信性能的变化,难以降低因伴随其他功能的处理导致的通信容量的逼迫、和传送状态的恶化引起的远程服务的中断以及重试的频率。
13.另外,没有考虑作业机械的动作状态、及在远程方面的远程服务的提供状态,难以降低因作业机械的不恰当的动作状态、和远程服务的不可提供状态引起的远程服务的中断以及重试的频率。
14.本发明是鉴于上述点做出的,其目的为,提供一种能够降低根据通信网络的性能变化和作业机械的动作状态以及服务的提供状态而发生的远程服务的中断以及重试的频率的作业机械。
15.解决上述课题的本发明的作业机械具有能够与第一通信网络连接的控制装置,该第一通信网络用于与机械外部进行通信,所述作业机械的特征在于,所述控制装置生成服务要求信息,并经由所述第一通信网络向所述机械外部传送该生成的所述服务要求信息,所述服务要求信息具有与从远程操作所述作业机械以及参照所述作业机械的内部信息的多个远程服务功能的每一个对应的功能类型、表示所述作业机械的动作状态的动作模式、和从所述第一通信网络计测的第一通信性能,且所述控制装置经由所述第一通信网络从所述机械外部接收服务执行信息,该服务执行信息具有与所述服务要求信息中包含的功能类型对应的服务功能的执行可否信息、允许执行与所述服务要求信息中包含的功能类型对应的服务功能的情况下的动作模式的条件、和允许执行与所述服务要求信息中包含的功能类型对应的服务功能的情况下的通信性能的条件。
16.发明效果
17.根据本发明的主要方式,能够将基于作业机械的作业状态和环境要因、以及作业现场整体的状况和远程方面的状况所导致的中断和重试防患于未然,能够缩短作业机械的非运转时间。另外,能够削减在远程服务提供侧发生的功能提供的中断以及重试,相对于作业现场整体,能够提供可应对以少量人员且高频率的调整和设定的远程服务。本发明相关的其他特征能够根据本说明书的记述、添加附图所明确。另外,上述以外的课题、构成以及效果通过以下的实施方式的说明所明晰。
附图说明
18.图1是使用了本实施方式的作业机械的远程服务用系统的实施例1的构成图。
19.图2是表示使用了本实施方式的作业机械的远程服务用系统的处理顺序的流程图。
20.图3是表示本实施方式的作业机械所具有的控制装置的控制模式的管理方法的状态转移图。
21.图4是表示由使用本实施方式的作业机械的远程服务用系统所使用的远程服务要求信息的图。
22.图5是表示使用了本实施方式的作业机械的远程服务用系统的一次判断部的设定内容的图。
23.图6是表示由使用了本实施方式的作业机械的远程服务用系统所使用的服务执行信息的内容的图。
24.图7是表示从本实施方式的作业机械的控制装置输出的远程服务的判断结果的显示画面的图。
25.图8是使用了本实施方式的作业机械的远程服务用系统的实施例2的构成图。
26.图9是表示使用了本实施方式的作业机械的远程服务用系统的实施例2的处理顺序的流程图。
具体实施方式
27.接着,一边适当参照附图,一边详细说明用于实施本发明的方式(称为“实施方式”)。
28.此外,在相同的构成要素为复数时,在将它们区分说明的情况下,在附图标记的末尾标注罗马字(a、b、
···
)。在不需要特别区分的情况下,不标注罗马字来说明。
29.<实施例1>
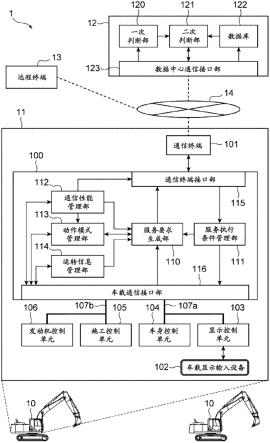
30.图1是使用了本实施方式的作业机械10的远程服务用系统1的实施例1的构成图。
31.本实施例的作业机械10的远程服务用系统1具有搭载于作业机械10的控制装置11、数据中心12、和远程终端13。作业机械10例如为在工程现场使用的工程机械。控制装置11具有将控制装置11和数据中心12、数据中心12和远程终端13相互连接的车外通信网络(第一通信网络)14。
32.控制装置11具有:经由通信发送接收车内以及车外的信息的信息控制单元100;与信息控制单元100连接并经由车外通信网络14执行与数据中心12的通信处理的通信终端101;车载显示输入设备102;与车载显示输入设备102连接并执行从车载显示输入设备102输出的显示画面的输出处理的显示控制单元103;执行车厢灯和雨刷器等车身的车身控制的车身控制单元104;执行作业机械10的斗杆和铲斗等施工作业的控制的施工控制单元105;和进行发动机的控制的发动机控制单元106。
33.另外,控制装置11作为连接线而分别具有将信息控制单元100、显示控制单元103和车身控制单元104各自相互连接的车载通信网络107a、以及将信息控制单元100、施工控制单元105和发动机控制单元106各自相互连接的车载通信网络107b。
34.信息控制单元100具有:生成并传送远程服务的要求的服务要求生成部110;受理远程服务的执行条件并将其储存于自身的服务执行条件管理部111;与服务要求生成部110连接并对通过车外通信网络14以及车载通信网络107a、107b获得的各种通信性能的信息进行收集且整理并将其储存于自身的通信性能管理部112;与服务要求生成部110连接并对表示车身整体的控制状态的动作模式进行管理的动作模式管理部113;与服务要求生成部110连接并对运转履历的信息进行收集且整理并将其储存于自身的运转信息管理部114;通信终端101;与服务要求生成部110、服务执行条件管理部111及通信性能管理部112连接并控制经由车外通信网络14的数据的发送接收的通信终端接口部115;和与服务要求生成部110、服务执行条件管理部111、通信性能管理部112、动作模式管理部113及运转信息管理部114连接并控制经由车载通信网络107a、b的数据的发送接收的车载通信接口部116。
35.另一方面,数据中心12具有:受理远程服务的要求并使用受理的信息来判断远程服务是否可以执行的一次判断部120;相对于一次判断部120的判断结果而基于其他的作业机械10的远程服务的实施状况和天候等的现场方面的状况、服务负责人的状况和过去的服务履历等的条件来再次判断远程服务是否可以执行的二次判断部121;与二次判断部121连接并将从多个作业机械10经由车外通信网络14传送的信息和从远程终端13经由车外通信网络14传送的信息进行汇集以及蓄积的数据库122;和与一次判断部120、二次判断部121及
数据库122连接并控制经由车外通信网络14的数据的发送接收的数据中心通信接口部123。
36.接着,针对使用了本实施例的控制装置11以及远程服务用系统1的远程服务的执行方法,一边适当使用图2至图7一边按照执行顺序依次进行说明。在此,以涉及作业机械10控制的参数调整(校准)为例进行说明。
37.图2是表示使用了本实施方式的作业机械10的远程服务用系统1的处理顺序的流程图。
38.首先,控制装置11一边经由车载通信网络107a、107b一边最终由服务要求生成部110受理远程服务的要求,该远程服务的要求是通过来自操作员的指示而经由车载显示输入设备102输入的、或者以搭载于作业机械10的执行机构等的设备和显示控制单元103等的不良情况为契机而输入的(s200)。
39.此时,远程服务的要求包括表示被要求的远程服务的功能的类型的要求功能,可以具有多个要求功能。
40.接着,控制装置11的服务要求生成部110参照作为过去实施的本处理顺序的结果而预先储存于服务执行条件管理部111的服务执行信息600(图6),对比服务执行信息600中包含的要求功能(为了方便,将其称为过去要求功能)、和通过处理200受理的远程服务的要求中包含的要求功能(为了方便,将其称为现在要求功能),在双方不一致的情况下(s201
→
是),作为远程服务的新受理,而生成远程服务要求信息400并将其经由通信终端101向数据中心12传送,该远程服务要求信息400是使现在要求功能、由通信性能管理部112获取的车外通信网络14以及车载通信网络107a、107b的通信性能、和由动作模式管理部113管理的动作模式的这些信息组合而成的(s202)。此时,服务要求生成部110可以与储存于运转信息管理部114的最低限的运转信息一起传送。
41.在此,使用图3详细说明动作模式。
42.图3是表示本实施方式的作业机械10所具有的控制装置11的控制模式的管理方法的状态转移图。
43.首先,控制装置11当自身起动后,通过动作模式管理部113的处理,使自身的动作模式转移至仅能够通过操作员的操作来控制作业动作且对于来自车外的访问仅能够执行数据的参照的内部控制及外部参照模式(s300)。
44.内部控制及外部参照模式(s300)还具有表示作业机械10的停止中的停止中模式(s310)、和表示作业机械10的行驶或者作业的执行中的行驶或作业执行中模式(s311),控制装置11的动作模式管理部113使动作模式转移至状态s310和状态s311。
45.此时,动作模式管理部113基于经由车载通信网络107获取的作业机械10的动作状态来使动作模式转移。
46.接着,动作模式管理部113在动作模式为内部控制及外部参照模式(s300),且能够对服务功能利用的通信性能不足基准的情况下(e300),即,由通信性能管理部112获取的车外通信网络14、和车载通信网络107的任意一个被判断为能够对远程服务分配的通信性能不足对自身预先设定的通信性能的值的情况下,使动作模式转移至仅能够通过操作员的操作来控制作业动作且使来自车外的访问为不可的内部控制模式(s301)。
47.接着,动作模式管理部113在动作模式为内部控制模式(s301),且能够对服务功能利用的通信性能为基准以上的情况下,即,由通信性能管理部112获取的车外通信网络14、
和车载通信网络107的通信性能的任意一个被判断为能够对远程服务分配的通信性能成为对自身预先设定的通信性能的基准以上的情况下(e301),使动作模式转移至内部控制及外部参照模式(s300)。
48.而且,动作模式管理部113在动作模式为内部控制及外部参照模式(s300)且为停止中模式(s310),例如在停止中从作业机械10具有最终执行的指示等具有来自服务要求生成部110的动作模式变更的指示的情况下(e302),使动作模式转移至以不受理来自操作员的作业动作的操作的方式仅通过来自车外的访问就能够执行作业动作的操作的外部控制模式(s302)。
49.接着,动作模式管理部113在动作模式为外部控制模式(s302),且判断为经由车外通信网络14具有来自车外的动作模式变更的指示或者车外通信网络14的通信中断的情况下(e303),使动作模式转移至内部控制及外部参照模式(s300)。
50.在此,返回图2的处理203继续进行说明。
51.使用图4来详细说明由处理203使用的远程服务要求信息400。
52.图4是表示由使用了本实施方式的作业机械10的远程服务用系统1所使用的远程服务要求信息400的图。
53.远程服务要求信息400具有要求内容信息410、动作模式信息411和通信性能信息412。要求内容信息410具有由服务要求生成部110受理的远程服务的要求中包含的要求功能。动作模式信息411具有当由服务要求生成部110受理远程服务的要求时从动作模式管理部113获取的动作模式。通信性能信息412具有当由服务要求生成部110受理远程服务的要求时从通信性能管理部112获取的车外通信网络14以及车载通信网络107a、107b的通信性能。
54.在此,返回图2继续进行说明。
55.在处理202之后,数据中心12受理从控制装置11传送的远程服务要求信息400,通过一次判断部120的处理,使用受理的远程服务要求信息400来执行远程服务的执行可否的一次判断(s203)。
56.此时,一次判断部120比较对自身设定的用于判断的基准值即判断基准设定信息500、和受理的远程服务要求信息400,在远程服务要求信息400满足判断基准设定信息500的基准值的情况下,判断为可以执行一次判断,在不满足基准值的情况下判断为无法执行。
57.在此,使用图5来说明对一次判断部120设定的判断基准设定信息500。
58.图5是表示使用了本实施方式的作业机械10的远程服务用系统1的一次判断部120的设定内容的图。
59.判断基准设定信息500相对于远程服务的各功能类型(相当于图5的各行),对每个动作模式(相当于图5的各列)设定了能够执行以及无法执行。
60.例如,在远程服务的功能类型为不良情况解析,动作模式为内部控制模式的情况下的设定内容为无法动作,在远程服务要求信息400符合条件的情况下,由一次判断部120判断为无法动作。
61.另外,判断基准设定信息500在远程服务的各功能、与动作模式的组合中设定为能够执行的情况下,还设定了通信性能的基准。
62.例如,在远程服务的功能类型为校准且动作模式为外部控制模式的情况下的通信
性能的基准为,车外通信网络14为移动无线,车外通信网络14以及车载通信网络107的通信速率为5mbps以上,远程服务要求信息400符合条件的情况下,由一次判断部120判断为无法动作。
63.在此,返回图2的处理203继续进行说明。
64.一次判断部120在处理203的完成时,向车外通信网络14输出如下内容:对远程服务要求信息400的要求内容信息410登记的多个要求功能;表示对于各个要求功能的是否可以执行的第一执行可否信息;和相对于各个要求功能设定的判断基准设定信息500的内容、即第一执行条件。
65.接着,数据中心12通过二次判断部121的处理,根据要求功能、基于数据库122内蓄积的多个作业机械10的信息使作业机械动作的现场方面的状况、基于数据库122内蓄积的从远程终端13传送的信息来提供远程服务的远程方面的状况、气象状况以及通信基础设施状况的环境信息,来执行远程服务的执行可否的二次判断(s204)。
66.作为具体处理方法,首先,二次判断部121推导出现场方面的状况和远程方面的状况,该现场方面的状况由从蓄积于数据库122的各个远程服务信息相对于多个作业机械10的执行状态以及执行预约以及执行时间所导出的、现场方面整体的现在及今后的远程服务的实施数量的时间推移、和从蓄积于数据库122的根据气象状况以及通信基础设施状况所预测的通信状态所导出的、现在及今后的远程服务的最大同时执行数量的时间推移构成,该远程方面的状况由从蓄积于数据库122的从远程终端13传送的远程方面的远程服务的提供状态以及提供预约以及应对时间所导出的、远程方面的现在及今后的远程服务的提供数量的时间推移、和蓄积于数据库122的从远程终端13传送的远程方面的同时最大对应数量的时间推移构成。
67.接着,二次判断部121相对于各要求功能进行第二执行可否信息的判断输出,其中,在基于现场方面的状况,现在的服务的实施数量比现在的服务的最大实施数量少的情况下,且在根据远程方面的状况而现在的远程服务的提供数量比现在的远程服务的提供数量少的情况下设为执行可能,在基于现场方面的状况,现在的服务的实施数量为现在的服务的最大实施数量同等以上的情况下,或者在根据远程方面的状况而现在的远程服务的最大提供数量为现在的远程服务的提供数量同等以上的情况下设为不可执行。
68.而且,二次判断部121相对于各要求功能,在第一执行可否信息以及第二执行可否信息的任何一个都为不可执行的情况下,根据现场方面的状况中包含的今后的远程服务的实施数量的时间推移、以及今后的服务的最大实施数量、和远程方面的状况中包含的今后的远程服务的提供数量、以及今后的远程服务的最大提供数量来推导出能够允许远程服务的执行的执行时刻,并将其作为包括对推导所用的各种条件、和执行时刻的第二执行条件而输出。
69.此时,二次判断部121也可以包括根据各要求功能的执行时刻决定的、执行顺序。另外,二次判断部121也可以为了输出第二执行条件而相对于远程终端13重新要求信息的传送。
70.在处理202之后,二次判断部121将要求功能、第一执行可否信息、第二执行可否信息、第一执行条件和第二执行条件汇总而生成服务执行信息600,并经由车外通信网络14向控制装置11传送(s205)。
71.在此,使用图6来详细说明服务执行信息600。
72.图6是表示由使用了本实施方式的作业机械10的远程服务用系统1所使用的服务执行信息600的内容的图。
73.服务执行信息600具有要求内容信息410、执行可否信息(判断结果)610和执行条件信息611。执行可否信息610具有第一执行可否信息(相当于图6的610-2)、和第二执行可否信息(相当于图6的610-3),在第一执行可否信息以及第二执行可否信息的任意一个都为不可执行的情况下,将执行可否的综合判断(相当于图6的610-1)设为不可执行,在非上述的情况下设为执行可能。执行条件信息611具有第一执行条件(相当于图6的611-1)和第二执行条件(相当于图6的611-2)。
74.在此,返回图2的处理205继续说明。在处理205后,控制装置11通过服务执行条件管理部111来确认所受理的服务执行信息600的内容,并储存于服务执行条件管理部111(s206)。
75.此时,服务执行条件管理部111执行与所储存的服务执行信息600相符的全部远程服务,在完成之前至少持续储存。
76.接着,服务执行条件管理部111将经由通信终端101传送且储存于自身内的服务执行信息600向显示控制单元103传送,显示控制单元103生成包括所传送的服务执行信息600的内容的一部分且用于对车载显示输入设备102进行画面输出的服务提示信息(s207),并将服务提示信息作为车载显示输入设备102的画面的输出而进行提示(s208)。
77.在此,使用图7,作为车载显示输入设备102的输出画面700的一例而说明服务提示信息。
78.图7是表示从本实施方式的作业机械10的控制装置11输出的远程服务的判断结果的显示画面的图。
79.输出画面700具有:作为显示输入用的画面的远程服务要求操作部701,其用于受理经由车载显示输入设备102通过来自操作员的指示而输入的远程服务的要求(相当于图2的处理200的一部分);和作为显示输入画面的服务提示信息显示部702,其用于提示服务提示信息。
80.此时,服务提示信息具有基于服务执行信息600的执行可否的综合判断、和服务执行信息600的执行可否的综合判断得到的画面显示用的信息,并作为服务提示信息显示部702的一部分而被提示(相当于图7的702-1)。
81.而且,服务提示信息具有服务执行信息600的执行可否信息610中的、与判断为不可执行的项目对应的执行条件信息611、和基于执行条件信息611得到的画面显示用的信息,并作为服务提示信息显示部702的一部分而被提示(相当于图7的702-2)。
82.在此,返回图2的处理208继续说明。
83.在处理208后,控制装置11的服务要求生成部110在储存于服务执行条件管理部111的服务执行信息600的执行可否信息610的综合判断为执行可能且经由车载显示输入设备102在预先规定的时间以内受理了远程服务的执行指示的情况下(s209
→
是),将相当于服务执行信息600的要求信息410的远程服务的执行指令经由通信终端101向数据中心12传送,由此开始远程服务的执行(s210),根据远程服务的完成或者中断而完成处理。
84.作为由处理210执行的远程服务的具体例,在本实施例的作业机械10的校准的情
景下,控制装置11将自身的动作模式固定为外部操作模式,在没有受理到与作业机械10的作业动作有关的操作员的指示的状况下,将经由通信终端101接收且关于作业机械10的控制的各种参数重写,然后,基于经由通信终端101接收的操作指示使作业机械10动作,由此确认调整效果。
85.在处理208后,控制装置11的服务要求生成部110在储存于服务执行条件管理部111的服务执行信息600的执行可否信息610的综合判断为执行可能且经由车载显示输入设备102在预先规定的时间以内没有受理到远程服务的执行指示的情况下,或者在执行可否信息610的综合判断为不可执行的情况下(s209
→
否),完成处理。
86.然后,希望操作员根据出现在输出画面700的服务提示信息显示部702提示的执行条件信息611的条件成立的状况,而再次执行本处理顺序。
87.返回处理201再次说明上述再执行的情况下的控制装置11的处理顺序。
88.处理201中的控制装置11通过服务要求生成部110的处理,参照储存于服务执行条件管理部111的服务执行信息600,对比过去要求功能和现在要求功能,在全都一致的情况下(s201
→
否,所述再执行的情况相当于s201
→
否的条件),判断为虽然过去受理了但没有执行的远程服务的要求,向处理211前进。
89.在处理211中,通过服务要求生成部110的处理,参照包括与现在要求功能一致的过去要求功能在内的服务执行信息600(为了便捷而称为相关执行信息),而且实施全部的第一执行判断、第二执行判断、第三执行判断和第四执行判断,其中,第一执行判断为,相对于由通信性能管理部112获取的车外通信网络14以及车载通信网络107a、107b的通信性能,根据相关执行信息的执行条件信息611中包含的通信性能的条件进行判断,第二执行判断为,相对于由动作模式管理部113管理的动作模式,根据相关执行信息的执行条件信息611中包含的动作模式的条件进行判断,第三执行判断为,相对于多个现在要求功能,根据相关执行信息的执行条件信息611中包含的执行顺序的条件进行判断,第四执行判断为,相对于由服务要求生成部110管理的现在时刻,根据相关执行信息的执行条件信息611中包含的执行时刻的条件进行判断。并且,在针对全部第一至第四执行判断而满足条件的情况下(s211
→
是),开始相当于现在的要求信息的远程服务的执行(s210),根据远程服务的完成或者中断而完成处理。
90.另一方面,在第一至第四执行判断的任意一个没有满足条件的情况下(s211
→
否),将相关执行信息的执行可否信息610置换为第一至第四执行判断的结果,然后向处理207前进。
91.由此,作为结果,使用输出画面700生成没有通过第一至第四的执行判断满足的条件的提示(s207、s208),由于要求功能为不可执行(s209
→
否),所以完成处理。
92.通过数据中心12的判断,在远程服务的执行之前,能够判断机身自体、以及现场方面和服务提供侧等的周边环境是否处于恰当状态,能够将基于机身的作业状态和环境要因、以及作业现场整体的状况和远程方面的状况导致的中断和重试防止于未然。因此,能够有助于作业机械的非运转时间的缩短。另外,能够削减在远程服务提供侧发生的功能提供的中断以及重试,相对于作业现场整体,能够提供以较少的人员应对高频率的调整和设定的远程服务。
93.<实施例2>
94.图8是使用了本实施方式的作业机械10的远程服务用系统1的实施例2的构成图。
95.本实施例的特征为,将实施例1中数据中心12所具有的一次判断部120删除,代替地在控制装置11的信息控制单元100具有一次判断部120。
96.本实施例的一次判断部120与服务要求生成部110、服务执行条件管理部111、和通信终端接口部115连接。
97.图9是表示使用了本实施方式的作业机械10的远程服务用系统1的实施例2的处理顺序的流程图。
98.本处理顺序具有大量与实施例1所说明的内容同样的部分,因此省略重复部分的说明,对作为变更部分的处理900~902进行说明。
99.处理900中,控制装置11的服务要求生成部110通过与图2的处理202同样的处理内容,生成远程服务要求信息400,并向一次判断部120传送(s900)。
100.接着,控制装置11的一次判断部120受理远程服务要求信息400,通过与图2的处理203同样的处理内容,执行远程服务的执行可否的一次判断,生成第一执行可否信息、和第一执行条件(s901),在作为一次判断的结果而远程服务为执行可能的情况下,设为新的受理(s902
→
是),将第一执行可否信息、和第一执行条件经由通信终端101向数据中心12传送,并向处理204前进。
101.在作为一次判断的结果而远程服务为不可执行的情况下(s902
→
否),一次判断部120生成具有要求信息410、执行可否信息610和执行条件信息611的服务执行信息600,并在将其向服务执行条件管理部111传送之后向处理206前进,该执行可否信息610作为数据不适用而包括第一执行可否信息和第二执行可否信息,且作为执行可否的综合判断而包括第一执行可否信息的结果,该执行条件信息611作为数据不适用而包括第一执行条件和第二执行条件。
102.此外,假设一次判断部120事前设定了判断基准设定信息500。
103.本实施例中,在远程服务的执行之前,不使用数据中心12,仅通过控制装置11就能够实施机身自体的状态是否恰当的判断,由此,在仅通过机身自体的状态无法执行远程服务的情况下,能够不借助车外通信网络14,立刻提示远程服务的执行可否,能够进一步缩短作业机械的非运转时间。
104.另外,由本实施例的控制装置11以及远程服务用系统1获得的其他效果是与实施例1同样的,因此省略重复说明。
105.以上,详细说明了本发明的实施方式,但本发明并不限定于上述实施方式,在不脱离技术方案所述的本发明精神的范围内,能够进行各种设计变更。例如,为了易于理解地说明本发明,对上述实施方式进行了详细说明,但并非限定于必须具有所说明的全部构成。另外,能够将某一实施方式的构成的一部分与其他实施方式的构成置换,另外,能够向某一实施方式的构成中加入其他实施方式的构成。而且,针对各实施方式的构成的一部分,能够进行其他构成的追加、削除、置换。
106.附图标记说明
107.1 远程服务用系统
108.10 作业机械
109.11 控制装置
110.12 数据中心
111.13 远程终端
112.14 车外通信网络(第一通信网络)
113.100 信息控制单元
114.101 通信终端
115.102 车载显示输入设备
116.103 显示控制单元
117.104 车身控制单元
118.105 施工控制单元
119.106 发动机控制单元
120.107、107a、107b 车载通信网络(第二通信网络)
121.110 服务要求生成部
122.111 服务执行条件管理部
123.112 通信性能管理部
124.113 动作模式管理部
125.114 运转信息管理部
126.115 通信终端接口部
127.116 车载通信接口部
128.120 一次判断部
129.121 二次判断部
130.122 数据库
131.123 数据中心通信接口部
132.400 远程服务要求信息(服务要求信息)
133.410 要求信息
134.411 控制模式信息
135.412 通信性能信息
136.500 判断基准设定信息
137.600 服务执行信息
138.610 执行可否信息
139.611 执行条件信息
140.700 输出画面
141.701 远程服务要求操作部
142.702 服务提示信息显示部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。