技术特征:
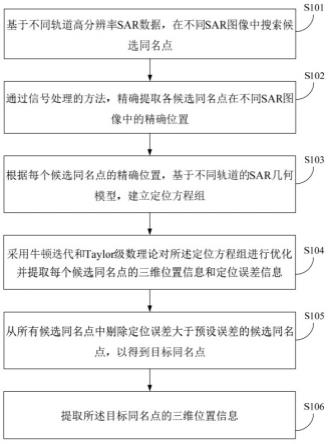
1.一种轨道高分辨率sar数据的目标三维位置反演方法,其特征在于,所述方法包括:基于不同轨道高分辨率sar数据,在不同sar图像中搜索候选同名点;通过信号处理的方法,精确提取各候选同名点在不同sar图像中的精确位置;根据每个候选同名点的精确位置,基于不同轨道的sar几何模型,建立定位方程组;采用牛顿迭代和taylor级数理论对所述定位方程组进行优化,并提取每个候选同名点的三维位置信息和定位误差信息;从所有候选同名点中剔除定位误差大于预设误差的候选同名点,以得到目标同名点;提取所述目标同名点的三维位置信息。2.根据权利要求1所述的方法,其特征在于,根据每个候选同名点的精确位置,基于不同轨道的sar几何模型,建立定位方程组,包括:在sar几何模型下,根据候选同名点位置与第i幅sar图像所对应卫星位置建立如下定位方程组:
ꢀꢀ
(1)其中,f
a,i
和f
r,i
分别为多普勒方程和斜距方程,t
az,i
和t
ra,i
分别表示该候选同名点在第i幅sar图像中对应的方位向时间和距离向时间,由该候选同名点在sar图像中的位置坐标[r
i
, c
i
]确定,t=[x
t
,y
t
,z
t
]表示该候选同名点在wgs84坐标系下的三维空间位置坐标,x
i
(t
az,i
)和v
i
(t
az,i
)分别表示t
az,i
时刻卫星对应的位置坐标和速度,vlight为光速;综合所述候选同名点的位置与n个不同轨道卫星的位置关系确定联合方程组:
其中,候选同名点的三维空间位置坐标为待求解未知量。3.根据权利要求2所述的方法,其特征在于,采用牛顿迭代和taylor级数理论对所述定位方程组进行优化,并提取每个候选同名点的三维位置信息和定位误差信息,包括:基于taylor级数理论,将所述定位方程组转化为如下线性方程组:or级数理论,将所述定位方程组转化为如下线性方程组:综合n幅sar图像的数据,所述联合方程组可改写成下列联合矩阵的形式:
hθ qx f=0各矩阵的具体表达形式如下:各矩阵的具体表达形式如下:根据所述联合矩阵和满秩矩阵,确定目标矩阵:h-1
qx=-h-1
f-θ其中,求解x需满足最小θ
t
pθ的条件,依据最小二乘理论,将所述目标矩阵转化为:ax=b ε其中,a=h-1
q,b=-h-1
f,ε=-θ,p为权重矩阵;则x的最优解表示为:x=(a
t
pa)-1
a
t
pb更新后的候选同名点坐标t1=[x
t,1
, y
t,1
, z
t,1
]
t
表示为:t1=t0 x其中,t0=[x
t,0
, y
t,0,
z
t,0
]
t
表示初始的候选同名点坐标,[dx
t
, dy
t
, dz
t
]
t
表示修正坐标量,[dt
az,i
, dt
ra,i]
表示第i幅图像中对应的距离向时间和方位向时间的偏差量;经过迭代,更新后候选同名点的坐标为t1=[x
t,0 dx
t
, y
t,0 dy
t,
z
t,0 dz
t
]
t
;经过多轮迭代,当修正坐标量x的模值|x|达到最小或者迭代处理超过预定的迭代次数
时,计算得到候选同名点的三维位置信息。4.根据权利要求1所述的方法,其特征在于,所述方法还包括:根据所述候选同名点的三维位置信息,采用以下公式计算对应的定位误差信息:j=θ
t
wθ其中,j表示所述候选同名点的定位误差信息,θ表示基于候选同名点的三维位置坐标,在每幅sar图像中算得的距离向和方位向时间偏差矢量;w表示权重矩阵。5.根据权利要求1所述的方法,其特征在于,基于不同轨道高分辨率sar数据,在不同sar图像中搜索候选同名点,包括:针对每幅sar图像,选择点目标;基于sar地理编码的原理,将不同轨道sar图像中的点目标进行地理编码;将地理编码后空间位置邻近的点目标确定为候选同名点。6.一种轨道高分辨率sar数据的目标三维位置反演装置 ,其特征在于,所述装置包括:搜索模块,用于基于不同轨道高分辨率sar数据,在不同sar图像中搜索候选同名点;第一提取模块,用于通过信号处理的方法,精确提取各候选同名点在不同sar图像中的精确位置;建立模块,用于根据每个候选同名点的精确位置,基于不同轨道的sar几何模型,建立定位方程组;第二提取模块,用于采用牛顿迭代和taylor级数理论对所述定位方程组进行优化,并提取每个候选同名点的三维位置信息和定位误差信息;剔除模块,用于从所有候选同名点中剔除定位误差大于预设误差的候选同名点,以得到目标同名点;第三提取模块,提取所述目标同名点的三维位置信息。7.根据权利要求6所述的装置,其特征在于,所述建立模块用于:在sar几何模型下,根据候选同名点位置与第i幅sar图像所对应卫星位置建立如下定位方程组: (1)其中,f
a,i
和f
r,i
分别为多普勒方程和斜距方程,t
az,i
和t
ra,i
分别表示该候选同名点在第i幅sar图像中对应的方位向时间和距离向时间,由该候选同名点在sar图像中的位置坐标[r
i
, c
i
]确定,t=[x
t
,y
t
,z
t
]表示该候选同名点在wgs84坐标系下的三维空间位置坐标,x
i
(t
az,i
)和v
i
(t
az,i
)分别表示t
az,i
时刻卫星对应的位置坐标和速度,vlight为光速;综合所述候选同名点的位置与n个不同轨道卫星的位置关系确定联合方程组:
其中,候选同名点的三维空间位置坐标为待求解未知量。8.根据权利要求7所述的装置,其特征在于,所述第二提取模块用于:基于taylor级数理论,将所述定位方程组转化为如下线性方程组:基于taylor级数理论,将所述定位方程组转化为如下线性方程组:其中,t0=[x
t,0
, y
t,0,
z
t,0
]
t
表示初始的候选同名点坐标,[dx
t
, dy
t
, dz
t
]
t
表示修正坐标量,[dt
az,i
, dt
ra,i]
表示第i幅图像中对应的距离向时间和方位向时间的偏差量;经过迭代,
更新后候选同名点的坐标为t1=[x
t,0 dx
t
, y
t,0 dy
t,
z
t,0 dz
t
]
t
;综合n幅sar图像的数据,所述联合方程组可改写成下列联合矩阵的形式:hθ qx f=0各矩阵的具体表达形式如下:各矩阵的具体表达形式如下:根据所述联合矩阵和满秩矩阵,确定目标矩阵:h-1
qx=-h-1
f-θ其中,求解x需满足最小θ
t
pθ的条件,依据最小二乘理论,将所述目标矩阵转化为:ax=b ε其中,a=h-1
q,b=-h-1
f,ε=-θ,p为权重矩阵;则x的最优解表示为:x=(a
t
pa)-1
a
t
pb更新后的候选同名点坐标t1=[x
t,1
, y
t,1
, z
t,1
]
t
表示为:t1=t0 x经过多轮迭代,当修正坐标量x的模值|x|达到最小或者迭代处理超过预定的迭代次数时,计算得到候选同名点的三维位置信息。
9.根据权利要求6所述的装置,其特征在于,所述装置还包括:计算模块,用于根据所述候选同名点的三维位置信息,采用以下公式计算对应的定位误差信息:j=θ
t
wθ其中,j表示所述候选同名点的定位误差信息,θ表示基于候选同名点的三维位置坐标,在每幅sar图像中算得的距离向和方位向时间偏差矢量;w表示权重矩阵。10.根据权利要求6所述的装置,其特征在于,所述搜索模块包括:选择单元,用于针对每幅sar图像,选择点目标;编码单元,用于基于sar地理编码的原理,将不同轨道sar图像中的点目标进行地理编码;确定单元,用于将地理编码后空间位置邻近的点目标确定为候选同名点。
技术总结
本发明涉及合成孔径雷达技术领域,是关于一种轨道高分辨率SAR数据的目标三维位置反演方法和装置,方法包括:基于不同轨道高分辨率SAR数据,在不同SAR图像中搜索候选同名点;通过信号处理的方法,精确提取各候选同名点在不同SAR图像中的精确位置;根据每个候选同名点的精确位置,基于不同轨道的SAR几何模型,建立定位方程组;采用牛顿迭代和Taylor级数理论对定位方程组进行优化,并提取每个候选同名点的三维位置信息和定位误差信息;从所有候选同名点中剔除定位误差大于预设误差的候选同名点,以得到目标同名点;提取目标同名点的三维位置信息。通过该方案,能精确测量目标点的三维位置信息。置信息。置信息。
技术研发人员:朱茂 李吉平 周海兵 班勇 冯飞 徐康 杨德志 孙琪瑶
受保护的技术使用者:北京东方至远科技股份有限公司
技术研发日:2022.04.08
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。