技术特征:
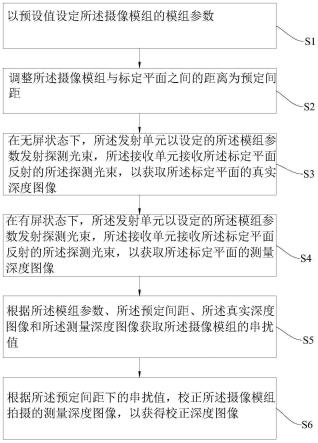
1.一种屏下摄像模组的深度图像校正方法,其特征在于,所述摄像模组置于显示屏下侧,所述摄像模组包括发射单元和接收单元,所述屏下摄像模组的深度图像校正方法包括:s1,以预设值设定所述摄像模组的模组参数;s2,调整所述摄像模组与标定平面之间的距离为预定间距;s3,在无屏状态下,所述发射单元以设定的所述模组参数发射探测光束,所述接收单元接收所述标定平面反射的所述探测光束,以获取所述标定平面的真实深度图像;s4,在有屏状态下,所述发射单元以设定的所述模组参数发射探测光束,所述接收单元接收所述标定平面反射的所述探测光束,以获取所述标定平面的测量深度图像;s5,根据所述模组参数、所述预定间距、所述真实深度图像和所述测量深度图像获取所述摄像模组在所述预定间距下的串扰值;s6,根据所述预定间距下的串扰值,校正所述摄像模组拍摄的测量深度图像,以获得校正深度图像。2.根据权利要求1所述的屏下摄像模组的深度图像校正方法,其特征在于,所述真实深度图像包括无屏状态下的每个像素位置的真实信号幅值,所述测量深度图像包括有屏状态下的每个所述像素位置的测量信号幅值;所述s5步骤还包括,根据所述模组参数、所述预定间距和所述真实信号幅值获取系统延时导致的每个所述像素位置的相位差偏差,根据每个所述像素位置的所述真实信号幅值、对应像素位置的测量信号幅值以及相位差偏差,获取每个对应像素位置的串扰值。3.根据权利要求2所述的屏下摄像模组的深度图像校正方法,其特征在于,所述模组参数包括:所述发射单元的发射信号频率f
m
,所述s5步骤还包括根据所述真实信号幅值获取真实相位差;所述相位差偏差offset,满足:其中,dist_real为所述预定间距,c为光速,为所述真实相位差。4.根据权利要求3所述的屏下摄像模组的深度图像校正方法,其特征在于,所述串扰值包括串扰幅值,所述串扰幅值包括垂直分量q
串
和水平分量i
串
,q
串
和i
串
满足:q
串
=i
串
*tan(offset),其中,q
测
为所述测量信号幅值的垂直分量,i
测
为所述测量信号幅值的水平分量。5.根据权利要求1所述的屏下摄像模组的深度图像校正方法,其特征在于,在所述s5步骤和所述s6步骤之间还包括:s51,调整所述摄像模组与所述标定平面之间的距离为验证间距;s52,重复所述s3步骤至所述s5步骤,以获得所述验证间距下的所述摄像模组的串扰值;s53,判断所述验证间距下的串扰值与所述预定间距下的串扰值之间的差值是否在预设阈值内;s54,若是,则导出所述预定间距下的串扰值,若否则重复执行所述s1步骤至所述s53步骤,直至所差值在所述预设阈值内。
6.一种屏下摄像模组的深度图像校正装置,其特征在于,包括:置于显示屏下侧的摄像模组,所述摄像模组包括发射单元和接收单元,所述发射单元用于发射探测光束,所述接收单元用于接收所述探测光束;反射模块,所述反射模块包括标定平面,所述标定平面用于反射所述探测光束,所述标定平面与所述发射单元之间具有预定间距;固定模块,所述显示屏安装在所述固定模块上;其中,在无屏状态下,所述发射单元以设定的所述模组参数发射探测光束,所述接收单元接收所述标定平面反射的所述探测光束,以获取所述标定平面的真实深度图像;在有屏状态下,所述发射单元以设定的所述模组参数发射探测光束,所述接收单元接收所述标定平面反射的所述探测光束,以获取所述标定平面的测量深度图像;数据处理模块,根据所述模组参数、所述预定间距、所述真实深度图像和所述测量深度图像计算所述摄像模组的串扰值;校正模块,用于存储所述串扰值,并能根据所述串扰值校正所述摄像模组拍摄的深度图像。7.根据权利要求6所述的屏下摄像模组的深度图像校正装置,其特征在于,还包括:第一驱动组件,所述第一驱动组件用于驱动所述标定平面沿光轴方向靠近或者远离所述摄像模组。8.根据权利要求7所述的屏下摄像模组的深度图像校正装置,其特征在于,还包括:验证模块,所述验证模块能控制所述第一驱动组件,以使所述摄像模组与所述标定平面之间的距离为验证间距,并获取所述摄像模组在所述验证间距下的串扰值,以判断所述验证间距下的串扰值与所述预定间距下的串扰值之间的差值是否在预设阈值内,若是,则导出所述预定间距下的串扰值,若否则重复获取所述预定间距下的串扰值和所述验证间距下的串扰值,直至所差值在所述预设阈值内。9.根据权利要求6所述的屏下摄像模组的深度图像校正装置,其特征在于,还包括第二驱动组件,所述第二驱动组件用于驱动所述固定模块,以使所述显示屏与所述摄像模组之间的距离可调。10.一种电子设备,其特征在于,包括:摄像模组、显示屏、存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述摄像模组置于显示屏下侧,所述存储器存储有如权利要求1至5中任一项所述的屏下摄像模组的深度图像校正方法中获取的所述预定间距下的串扰值,所述处理器根据所述预定间距下的串扰值校正所述摄像模组拍摄的测量深度图像。
技术总结
本发明公开了一种屏下摄像模组的深度图像校正方法、装置和电子设备,深度图像校正方法包括:以预设值设定摄像模组的模组参数;调整摄像模组与标定平面之间的距离为预定间距;在无屏状态下,获取标定平面的真实深度图像;在有屏状态下,获取标定平面的测量深度图像;根据模组参数、预定间距、真实深度图像和测量深度图像获取摄像模组的串扰值;根据串扰值,校正摄像模组拍摄的测量深度图像,以获得校正深度图像。根据本发明的深度图像校正方法直接根据串扰值对测量深度图像进行校正,操作简单方便。方便。方便。
技术研发人员:刘映江 刘斌
受保护的技术使用者:江西欧迈斯微电子有限公司
技术研发日:2022.03.25
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。