1.本发明属于变电站设备防护的技术领域,具体涉及一种采用双激光进行驱鸟的云台设备以及设置有该云台设备的驱鸟装置。
背景技术:
2.由于变电站大多远离市区,且生态环境越来越好,同时变电站户外构架设备的特殊性,有不少飞鸟都将其作为筑巢的地点,特别是门型构架、管型刀闸臂、开关机构等更是其首选之处。鸟害对变电站安全运行的危害越来越大,鸟害的有效防治成为变电站安全运行的重要工作。
3.鸟类对变电站造成危险的主要原因是搭建鸟巢,鸟巢编辑可能有树枝、草、金属铁丝。还有鸟的粪便长期堆积的粪便是具有一定的导电性及腐蚀性,会造成跳闸及线路烧毁,损失不可估量。
4.因此,需要一种双激光驱鸟云台,来解决上述技术问题。
技术实现要素:
5.本发明针对现有技术中存在的技术问题,提供一种双激光驱鸟云台及双激光驱鸟装置,通过远程定时管理控制箱和ai识别云台对驱鸟设备进行控制和信号传输,使得驱鸟设备中的双激光云台能够交替变换发出红光和绿光,能够解决鸟类的适应性。
6.本发明解决上述技术问题的技术方案如下:
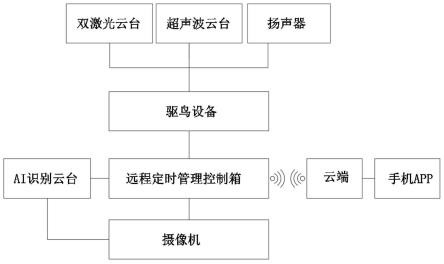
7.一种双激光驱鸟云台,包括远程定时管理控制箱,所述远程定时管理控制箱包括驱动模块、控制模块、供电模块、定时模块和无线模块,所述供电模块与ai识别云台、驱动模块、摄像机电性连接,所述控制模块与驱动模块电性连接,所述驱动模块与驱鸟设备电性连接,所述驱鸟设备包括双激光云台、扬声器和超声波云台,所述远程定时管理控制箱通过无线模块与云端通讯连接,所述云端与手机app通讯连接。
8.进一步,所述ai识别云台包括摄像机、存储模块和mcu,所述mcu的信号存储端与存储模块电性连接,所述mcu的信号接收端与摄像机电性连接,所述mcu的信号发射端通过无线模块与云端通讯连接。
9.进一步,所述无线模块为gprs通信和cdma通信中的任意一种,且采用g网络远程传输。
10.同时,本发明还提供了一种双激光驱鸟装置,该装置具有上述的双激光驱鸟云台,所述远程定时管理控制箱安装于支撑杆的侧壁上,所述支撑杆的底端焊接有底座,所述支撑杆的顶端通过法兰盘配合螺栓与安装杆的底端固定安装,所述安装杆的顶端焊接有安装板,所述安装板的顶面一侧安装有驱动组件,所述驱动组件安装于安装架的内侧,所述安装架的两侧的顶面分别安装有摄像机和双激光云台,所述安装板的顶面另一侧安装有ai识别云台。
11.进一步,所述驱动组件包括壳体、旋转调节组件和俯仰调节组件,所述旋转调节组
件包括第一驱动电机、第一齿轮、第二齿轮、轴承座、隔板和环形齿槽,所述第一驱动电机安装于安装板的顶面一侧上,所述第一驱动电机的输出轴键连接有第一齿轮,所述第一齿轮的侧壁与第二齿轮的一侧侧壁啮合连接,所述第二齿轮的另一侧侧壁与环形齿槽的侧壁啮合连接,所述环形齿槽开设于壳体的内侧壁上。
12.进一步,所述俯仰调节组件包括第二驱动电机、第一锥齿轮、第二锥齿轮和转杆,所述壳体的内部一体成型有隔板,所述第二驱动电机安装于隔板的顶面上,所述第二驱动电机的输出轴键连接有第一锥齿轮,所述第一锥齿轮的侧壁啮合连接有第二锥齿轮,所述第二锥齿轮的内部固定安装有转杆,所述转杆的两端分别固定安装于安装架的内侧侧壁上。
13.进一步,所述第二齿轮的内部键连接有轴杆,所述轴杆的顶端安装于轴承座的内部,所述轴承座通过螺丝固定安装于隔板的底面。
14.进一步,所述远程定时管理控制箱的侧壁安装有扬声器,所述摄像机和双激光云台的顶面均安装有防水罩。
15.与现有技术相比,本技术的技术方案具有以下有益技术效果:
16.1、本发明通过将驱鸟设备安装在变电站的构架上,并通过远程定时管理控制箱和ai识别云台对驱鸟设备进行控制和信号传输,使得驱鸟设备中的双激光云台能够交替变换发出红光和绿光,能够解决鸟类的适应性,ai识别云台通过摄像头能够对变电站的构架上停留的鸟类进行识别和拍摄,从而将鸟类被识别捕捉到信号传递给远程定时管理控制箱,在通过远程定时管理控制箱对驱鸟设备进行控制,从而能够双激光云台能够发出激光,超声波云台能够发出超声波,扬声器能够发出枪声、动物叫声等,来驱赶鸟类,从而能够起到驱鸟的作用,又通过远程定时管理控制箱中的无线模块与云端进行通讯连接,使云端将摄像头捕捉的画面能够远程传输到手机app,通过手机app能够实现对远程定时管理控制箱的远程控制,也能够随时观察变电站的构架环境,使得双激光驱鸟云台能够手动和自动对鸟类进行驱赶;
17.2、本发明在远程定时管理控制箱中驱动模块能够对驱动组件进行控制,控制驱动组件中的第一驱动电机和第二驱动电机,当控制第一驱动电机正反转时,能够使第一齿轮带动第二齿轮转动,从而使第二齿轮带动壳体发生转动,从而能够使双激光云台和摄像机能够在水平方向转动,再通过控制第二驱动电机正反转,从而能够使第一锥齿轮带动第二锥齿轮发生转动,使转杆能够正转反转,从而使双激光云台和摄像机能够沿着轴杆为轴线而转动,以此调节双激光云台和摄像机的拍摄和照射角度,能够大范围对变电站的构架上环境进行监控和管理。
附图说明
18.图1为本发明的整体结构示意图;
19.图2为本发明的驱动组件结构示意图;
20.图3为本发明的系统框图;
21.图4为本发明的远程定时管理控制箱系统框图。
22.附图中,各标号所代表的部件列表如下:
23.1、底座;2、支撑杆;3、远程定时管理控制箱;4、扬声器;5、安装杆;6、安装板;7、驱
动组件;71、壳体;72、第一驱动电机;73、第一齿轮;74、第二齿轮;75、轴承座;76、隔板;77、环形齿槽;78、第二驱动电机;79、第一锥齿轮;710、第二锥齿轮;711、转杆;8、安装架;9、双激光云台;10、摄像机;11、ai识别云台;12、防水罩。
具体实施方式
24.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.实施例1
26.本发明提供了如图1~4所示的双激光驱鸟云台,其包括一种双激光驱鸟云台,包括远程定时管理控制箱3,远程定时管理控制箱3包括驱动模块、控制模块、供电模块、定时模块和无线模块,供电模块与ai识别云台11、驱动模块、摄像机10电性连接,通过供电模块可以分别对ai识别云台11、驱动模块、摄像机10进行提供电力输出,使对应设备能够供电正常工作,控制模块与驱动模块电性连接;
27.其中,控制模块对驱动模块进行控制,使得驱动模块能够对驱动组件7中的第一驱动电机72和第二驱动电机78进行控制,从而能够控制双激光云台9和摄像机10的角度,驱动模块与驱鸟设备电性连接,驱鸟设备包括双激光云台9、扬声器4和超声波云台,通过双激光云台9交替式发出的红光和绿光,能够对鸟类进行驱赶,同时也能够解决鸟类的适应性,远程定时管理控制箱3通过无线模块与云端通讯连接,云端与手机app通讯连接,通过在远程定时管理控制箱3中控制模块上的预留接口外接一个无线模块,通过无线模块和云端通讯连接,从而能够使远程定时管理控制箱3具有无线信号传输功能,从而能够远程对远程定时管理控制箱3进行控制和接受远程定时管理控制箱3的传输信号,定时模块为定时器,通过将定时器与供电模块进行配合连接,使设备能够自动进行断电,并可以通过手机app远程对定时器进行定时,设定预定时间,从而能够使设备在不需要工作时,能够进行断电,节约电力。
28.需要说明的是,上述中给出的供电模块可以采用太阳能供电、市电供电和锂电池供电任意两种方式进行供电或者三种方式均可以,能够保证设备的供电的正常运行,同时也能够起到环保,节约用电的作用。
29.ai识别云台11包括摄像机10、存储模块和mcu,mcu的信号存储端与存储模块电性连接,通过对存储模块中写入用于识别鸟类程序,mcu的信号接收端与摄像机10电性连接,从而通过摄像机能够根据存储模块中的写入程序自动识别鸟类,mcu的信号发射端通过无线模块与云端通讯连接。
30.无线模块为gprs通信和cdma通信中的任意一种,且采用4g网络远程传输,通过在无线模块上集成sim卡槽,通过插入sim卡,就能够使远程定时管理控制箱3通过无线模块与云端握手,进行远程通讯连接,从而能够将ai识别云台向远程定时管理控制箱传输的摄像机记录的数据信号通过无线模块发送到云端,再通过云端无线传输到手机app上,将数字信号转换为画面,可以通过手机显示,同时通过云端也可以传输到监控室的电脑或者显示器上进行显示,以此能够24小时对变电站的门型构架、管型刀闸臂、开关机构进行监控处理。
31.实施例2
32.一种双激光驱鸟装置,远程定时管理控制箱3安装于支撑杆2的侧壁上,支撑杆2的底端焊接有底座1,支撑杆2的顶端通过法兰盘配合螺栓与安装杆5的底端固定安装,安装杆5的顶端焊接有安装板6,安装板6的顶面一侧安装有驱动组件7,驱动组件7安装于安装架8的内侧,安装架8的两侧的顶面分别安装有摄像机10和双激光云台9,安装板6的顶面另一侧安装有ai识别云台11。
33.其中,驱动组件7包括壳体71、旋转调节组件和俯仰调节组件,旋转调节组件包括第一驱动电机72、第一齿轮73、第二齿轮74、轴承座75、隔板76和环形齿槽77,第一驱动电机72安装于安装板6的顶面一侧上,第一驱动电机72的输出轴键连接有第一齿轮73,第一齿轮73的侧壁与第二齿轮74的一侧侧壁啮合连接,第二齿轮74的另一侧侧壁与环形齿槽77的侧壁啮合连接,环形齿槽77开设于壳体71的内侧壁上,当远程定时管理控制箱3通过驱动模块对第一驱动电机72进行控制时,控制第一驱动电机72正反转,能够使第一齿轮73带动第二齿轮74转动,从而使第二齿轮74带动壳体71发生转动,从而能够使双激光云台9和摄像机10能够在水平方向转动。
34.具体的,上述中的俯仰调节组件包括第二驱动电机78、第一锥齿轮79、第二锥齿轮710和转杆711,壳体71的内部一体成型有隔板76,第二驱动电机78安装于隔板76的顶面上,第二驱动电机78的输出轴键连接有第一锥齿轮79,第一锥齿轮79的侧壁啮合连接有第二锥齿轮710,第二锥齿轮710的内部固定安装有转杆711,转杆711的两端分别固定安装于安装架8的内侧侧壁上;
35.使用时,壳体上安装的导电滑环可使壳体在转动过程中,也能够对第二驱动电机78进行供电处理,使第二驱动电机78能够带动第一锥齿轮79转动,第一锥齿轮79带动第二锥齿轮710转动,进而使第二锥齿轮710带动转杆711转动,从而使转杆711带动安装架8转动,安装架8转动能够使双激光云台9和摄像机10转动,从而能够使双激光云台9和摄像机10能够较大范围对变电站的门型构架、管型刀闸臂、开关机构进行监控处理。
36.第二齿轮74的内部键连接有轴杆,轴杆的顶端安装于轴承座75的内部,轴承座75通过螺丝固定安装于隔板76的底面,使第二齿轮74能够通过轴承座75在壳体71的内部转动,从而能够将第一齿轮73传动到环形齿槽77上,使壳体71能够在第一齿轮73转动时,能够在第一驱动电机72的顶端转动。
37.远程定时管理控制箱3的侧壁安装有扬声器4,摄像机10和双激光云台9的顶面均安装有防水罩12,防水罩12能够便于摄像机10和双激光云台9中使用,虽然摄像机10和双激光云台9本身具有防水功能,但是通过增加防水罩12能够进一步防止摄像机10和双激光云台9在长时间的使用过程中,受外界干扰而导致损坏。
38.综上,本发明在远程定时管理控制箱中驱动模块能够对驱动组件进行控制,提供控制驱动组件可驱动双激光云台和摄像机能够沿着轴杆为轴线而转动,进而可调节双激光云台和摄像机的拍摄和照射角度,以使得本发明的驱鸟装置能够大范围对变电站的构架上环境进行监控和管理,有效提高对鸟类的驱赶效能。
39.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
