1.本实用新型涉及混凝土试件制作技术领域,特别是一种混凝土试件自动成型机。
背景技术:
2.混凝土立方体试件,可以反映混凝土结构的施工质量,通过对混凝土立方体试件进行力学性能试验可获取被测混凝土的性能指标,进一步反映混凝土整体结构的性能,混凝土立方体试件的测试指标包括混凝土抗压强度﹑渗水性能等;因此混凝土试件的制作成为测试的关键。
3.根据《普通混凝土力学性能试验方法标准》gb/t 50081—2002的要求,取样或试验室拌制的混凝土应在拌制后尽短的时间内成型,一般不宜超过15min。目前,混凝土试验块的制作全过程是通过人工来完成,由于工人技术水平的差异,造成试件的质量参差不齐,影响实验结果。同时,随着不同标号不同类型的混凝土种类越来越多,试件制作的工作量也逐步加大,耗费较多人力,试件信息的处理也需要更加精细化,故混凝土试件的自动制作亟待开展。
技术实现要素:
4.本实用新型需要解决的技术问题是提供一种混凝土试件自动成型机,替代人工,降低人工成本,克服制作过程费时、费力的不足,进一步提高工作效率和试件质量。
5.为解决上述技术问题,本实用新型所采取的技术方案如下。
6.一种混凝土试件自动成型机,包括竖立在地面上的框架,框架内的左侧设置有用于搅拌制作混凝土浆料的搅拌浇注装置,对应搅拌浇注装置出料口的框架内中部设置有夹持混凝土模具的模具装夹机构,模具装夹机构下方的框架上固定设置有对模具内的混凝土进行振动捣实的捣实振动装置;位于模具装夹机构上方的框架上设置有向模具内喷油的喷油机构以及用于对模具内的浆料进行抹平操作的抹平装置,所述框架的旁侧设置有协调搅拌浇注装置、模具装夹机构、捣实振动装置、喷油机构以及抹平装置协调作业的plc控制器。
7.上述一种混凝土试件自动成型机,所述框架包括至少四根由h型钢制作的立柱和与立柱相垂直连接并固定立柱的若干横梁,立柱和横梁之间通过连接块固定连接;每根立柱的底端分别设置一调平垫脚。
8.上述一种混凝土试件自动成型机,所述搅拌浇注装置包括滑动配装在前后横梁上的手动行车和电动行车,手动行车和电动行车之间通过转轴安装搅拌机,所述电动行车上固定设置有操作搅拌机旋转与稳定的搅拌机电推杆,搅拌机电推杆的底座与电动行车连接,搅拌机电推杆的伸缩杆顶端与转轴抱紧装配;所述搅拌机朝向模具装夹机构的一侧设置有向模具中倾倒浆料的导流槽;所述搅拌机、电动行车和搅拌机电推杆的受控端分别与plc控制器的输出端连接。
9.上述一种混凝土试件自动成型机,所述模具装夹机构包括底部和顶部敞口、四周围合的外置托盘和嵌入在外置托盘内、用于承托模具的内置托盘,外置托盘的一侧底边通
过活动铰链安装在捣实振动装置的顶端面上,与活动铰链相对的另一侧外置托盘顶边设置有向外延伸的水平支撑板,水平支撑板下方的捣实振动装置顶端面上设置有顶伸外置托盘的托盘电推杆,托盘电推杆的底座固定设置在捣实振动装置顶端面上,托盘电推杆的伸缩杆顶端与水平支撑板底端面相铰接;所述托盘电推杆的受控端与plc控制器的输出端连接。
10.上述一种混凝土试件自动成型机,所述捣实振动装置包括带振动电机的振动台,振动台通过两根支撑梁架设在框架上,支撑梁与框架的横梁之间通过直角形连接板固定连接;振动台的底端面与支撑梁之间通过带缓冲弹簧的定位柱固定连接;所述振动电机的受控端与plc控制器的输出端连接。
11.上述一种混凝土试件自动成型机,所述喷油机构包括滑动配装在横梁上的一对电动跑车,两电动跑车之间通过移动梁固定连接,移动梁的一侧通过油箱连接板固定安装有油箱,移动梁上水平设置有一排向模具中喷油的喷雾器,所有喷雾器通过母管连通,母管上连通设置有内螺纹直通,内螺纹直通与油箱之间通过油管连通,油管上设置有调压阀和电磁阀;所述电动跑车和电磁阀的受控端分别与plc控制器的输出端连接。
12.上述一种混凝土试件自动成型机,所述抹平装置包括带直流有刷电机的抹平机,抹平机通过支撑杆和悬臂安装在喷油机构的移动梁上,支撑杆为倒l型结构,支撑杆竖直段底端与移动梁固定连接,支撑杆水平段末端通过销轴与悬臂一端铰接,悬臂的底端通过抹平机连接板与抹平机顶端面铰接;所述直流有刷电机的受控端与plc控制器的输出端连接。
13.上述一种混凝土试件自动成型机,所述框架的顶部还设置有用于清洗搅拌浇注装置的第一清洗装置以及用于清洗模具装夹机构的第二清洗装置,框架上设置有在plc控制器的指令下控制第一清洗装置和第二清洗装置进行清洗作业的清洗控制机。
14.上述一种混凝土试件自动成型机,所述框架的底部设置有用于承接污水的收纳装置,收纳装置包括底部带脚轮的收纳盒,收纳盒的出水口处设置有过滤装置。
15.上述一种混凝土试件自动成型机,对应搅拌浇注装置的框架外侧设置有向搅拌浇注装置输送浆料的翻斗式上料装置。
16.由于采用了以上技术方案,本实用新型所取得技术进步如下。
17.本实用新型用于制作混凝土试件,采用模块化设计,将混凝土试件的制作工作智能化、自动化,占地面积小,一台机器便可实现自动搅拌浇注、自动抹油、自动捣实振动、自动抹平、自动清洗排砂的连续作业,替代了人工流程,操作简单,大大降低了人工成本,提高了工作效率以及试件质量。
附图说明
18.图1为本实用新型的主视图;
19.图2为本实用新型的俯视图;
20.图3为本实用新型的轴侧图;
21.图4为本实用新型所述搅拌浇注装置的结构示意图;
22.图5为本实用新型所述模具装夹机构的结构示意图;
23.图6为本实用新型所述模具装夹机构的立体图;
24.图7为本实用新型所述捣实振动装置的结构示意图;
25.图8为本实用新型所述进水管固定装置的结构示意图;
26.图9为本实用新型所述收纳装置的结构示意图;
27.图10为本实用新型所述抹平装置的结构示意图;
28.图11为本实用新型所述喷油机构和第二清洗装置的结构示意图;
29.图12为本实用新型所述喷油机构和第二清洗装置的侧视图;
30.图13为本实用新型所述第一清洗装置的结构示意图;
31.图14为本实用新型所述翻斗式上料装置的结构示意图。
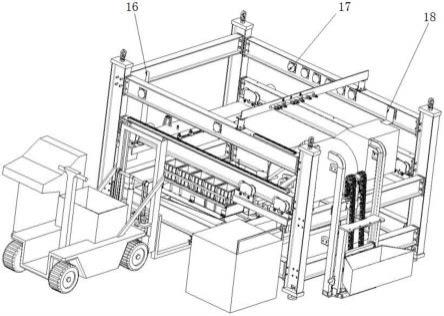
32.其中:1.框架,2.搅拌浇注装置,3.模具装夹机构,4.捣实振动装置,5.进水管固定装置,6.收纳装置,7.抹平装置,8.喷油机构,9.第一清洗装置,10.叉车,11.翻斗式上料装置,12.第二清洗装置,13.清洗控制机,14.plc控制台,15.模具,16.喷油清洗行车限位感应板,17.限位开关感应器,18.搅拌机行车限位感应板;
33.1.1、万向吊环,1.2、立柱,1.3、横梁,1.4、连接块,1.5、调平垫脚;
34.2.1、手动跑车,2.2、搅拌机,2.3、导流槽,2.4、电动行车,2.5、搅拌机电推杆;
35.3.1、内置托盘,3.2、外置托盘,3.3、托盘电推杆,3.4、活动铰链;
36.4.1、振动台,4.2、角钢,4.3、直角形连接板;
37.6.1、脚轮,6.2、过滤装置,6.3、收纳装置,6.4、手拉把柄连接孔;
38.7.1、抹平机,7.2、抹平机连接板,7.3、支撑杆,7.4、悬臂;
39.8.1、电动跑车,8.2、油箱连接板,8.3、喷雾器,8.4、内螺纹直通,8.5、第一快插公头,8.6、移动梁,8.7、油箱,8.8、调压阀,8.9、电磁阀,8.10、钢水管,8.11、第一万向喷头;
40.9.1、t型连接板,9.2、清洗水管固定板,9.3、第二万向喷头,9.4、第二快插公头。
具体实施方式
41.下面将结合附图和具体实施方式对本实用新型进行进一步详细说明。
42.一种混凝土试件自动成型机,其结构如图1至图3所示,包括竖立在地面上的框架1,框架上设置有搅拌浇注装置2、模具装夹机构3、捣实振动装置4、抹平装置7、喷油机构8、第一清洗装置9、第二清洗装置12、清洗控制机13和收纳装置6,框架的旁侧设置有plc控制器14,plc控制器14分别与搅拌浇注装置2、模具装夹机构3、捣实振动装置4、抹平装置7、喷油机构8和清洗控制机13电连接,控制各装置和机构协调作业,完成试件制作、清洗作业。
43.框架1的结构如图3所示,包括至少四根立柱1.2和与立柱相垂直连接并固定立柱的若干横梁1.3,立柱1.2和横梁1.3之间通过连接块1.4固定连接。本实用新型为保证整体成型机工作的稳定性与安全性,立柱1.2和横梁1.3都采用与18#工字钢力学性能相似的热轧h型钢制作,连接块1.4与立柱1.2和横梁1.3之间采用可拆卸式设计,横梁的尾端焊接连接板并打孔,在四个立柱上焊接连接板并进行打孔设计,通过连接块与两块连接板进行对接安装可以有效保证横梁与立柱之间连接的平整度,防止出现倾斜而影响设备正常工作。
44.每根立柱的底端分别设置一调平垫脚1.5,方便调整整机的水平度;立柱的顶端安装一万向吊环1.1,方便搬运整体成型机。
45.搅拌浇注装置2设置在框架的左侧,用于搅拌制作混凝土浆料。搅拌浇注装置2的结构如图4所示,包括滑动配装在前后横梁上的手动行车2.1和电动行车2.4,手动行车2.1和电动行车2.4之间通过转轴安装搅拌机2.2,搅拌机2.2朝向模具装夹机构3的一侧设置有导流槽2.3,以方便浆料顺利向倾倒到模具装夹机构3的模具中。
46.搅拌机和电动行车直接外采即可用,搅拌机2.2和电动行车2.4的受控端分别与plc控制器14的输出端连接。手动行车2.1和电动行车2.4可在plc控制器的指令下沿横梁左右移动,从而带动搅拌机与模具装夹机构3之间的位置发生改变,便于将搅拌机内的浆料准确倾倒进模具装夹机构的各个模具中。
47.本实施例中,导流槽设计为三个槽口,每个槽口对应一个模具,保证搅拌机中的混凝土能够相对均匀的一次浇注一组模具;同时,搅拌机后部设置为圆弧形,主要是为了防止混凝土在下料过程中淤积在后部凝结成块,便于下料的同时也便于清洗。
48.本实用新型的电动行车2.4上固定设置有操作搅拌机旋转与稳定的搅拌机电推杆2.5,搅拌机电推杆2.5的底座与电动行车2.4连接,搅拌机电推杆2.5的伸缩杆顶端与转轴抱紧装配;搅拌机电推杆2.5的受控端与plc控制器14的输出端连接。搅拌机电推杆2.5不仅能够通过锁紧力保证搅拌机在搅拌混凝土时搅拌桶不会发生侧翻,还能够在倾倒时推动搅拌机倾斜,方便出料。为限制电动行车带动搅拌机在横梁上行走超位,本实施例在横梁上设置了搅拌机行车限位感应板18,搅拌机行车限位感应板18的输出端连接plc控制器的输入端,plc控制器根据搅拌机行车限位感应板18的信号控制电动行车2.4的启停。
49.对应搅拌浇注装置2的框架外侧设置有翻斗式上料装置11,用于向搅拌浇注装置2输送浆料,翻斗式上料装置11的结构如图14所示。本实用新型中,翻斗式上料装置11可直接购买使用,但对上料斗结构进行了改进,上料斗设计成梯形状且两侧带有挡板,方便工人推着混凝土推车向上料斗倾倒混凝土,同时可从上料斗的称重传感器和重力显示装置来控制倒入混凝土的量,倒料完成后,通过plc控制器控制混凝土翻斗式上料装置中的电机转动使上料斗上升,将混凝土浆料倾倒进搅拌浇注装置。
50.模具装夹机构3对应搅拌浇注装置出料口设置在框架内中部,用于夹持混凝土模具。模具装夹机构3的结构如图5和图6所示,包括外置托盘3.2和内置托盘3.1,外置托盘3.2的底部和顶部敞口设置,外置托盘3.2的四周围合用于限位模具;内置托盘3.1嵌入在外置托盘3.2内,用于承托模具。本实用新型中,模具装夹机构设计成有缝隙的内、外托盘结构,既方便试件插送,又方便清洗抹平时从缝隙中流落多余的混凝土。
51.为方便取出模具,外置托盘3.2的一侧底边通过活动铰链3.4安装在捣实振动装置4的顶端面上,与活动铰链3.4相对的另一侧外置托盘顶边设置有向外延伸的水平支撑板,水平支撑板下方的捣实振动装置4顶端面上设置有托盘电推杆3.3,用于顶伸外置托盘3.2,托盘电推杆3.3的底座固定设置在捣实振动装置4顶端面上,托盘电推杆3.3的伸缩杆顶端与水平支撑板底端面相铰接;所述托盘电推杆3.3的受控端与plc控制器14的输出端连接。当试件制作完成后,通过控制托盘电推杆3.3伸长,使外置托盘3.2和内置托盘3.1分开,便可采用叉车10将内置托盘和其内的模具及试件运走。
52.捣实振动装置4设置在模具装夹机构3下方的框架上,用于对模具内的混凝土进行振动捣实。捣实振动装置4的结构如图7所示,包括带振动电机的振动台4.1,振动台4.1通过两根支撑梁架设在框架上,支撑梁与框架的横梁之间通过直角形连接板4.3固定连接,振动台4.1的底端面与支撑梁之间通过带缓冲弹簧的定位柱固定连接;所述振动电机的受控端与plc控制器14的输出端连接。上述外置托盘的底边通过活动铰链3.4与振动台4.1的顶端面连接,托盘电推杆3.3也设置在振动台4.1上。
53.喷油机构8和抹平装置7设置在模具装夹机构3上方的框架上,喷油机构8用于在试
件制作前向模具内喷油,方便试件的取出;抹平装置7则用于对模具内的浆料进行抹平操作。
54.喷油机构8的结构图11和图12所示,包括滑动配装在横梁上的一对电动跑车8.1,两电动跑车之间通过移动梁8.6固定连接,移动梁8.6的一侧通过油箱连接板8.2固定安装有油箱8.7,移动梁8.6上水平设置有一排向模具中喷油的喷雾器8.3,所有喷雾器通过母管连通,母管上连通设置有内螺纹直通8.4,内螺纹直通8.4内装配有第一快插公头8.5,第一快插公头8.5与油箱8.7之间通过油管连通,油管上设置有调压阀8.8和电磁阀8.9;所述电动跑车8.1和电磁阀8.9的受控端分别与plc控制器14的输出端连接。
55.为防止电动跑车脱轨,在横梁上设置了喷油清洗行车限位感应板16以及限位开关感应器17,喷油清洗行车限位感应板16和限位开关感应器17的输出端分别与plc控制器的输入端连接,plc控制器根据喷油清洗行车限位感应板16以及限位开关感应器17采集的信号来控制电动跑车的启停。
56.抹平装置7的结构如图10所示,包括带直流有刷电机的抹平机7.1,抹平机7.1通过支撑杆7.3和悬臂7.4安装在喷油机构8的移动梁8.6上,支撑杆7.3为倒l型结构,支撑杆7.3的竖直段底端与移动梁8.6固定连接,支撑杆7.3的水平段末端通过销轴与悬臂7.4一端铰接,悬臂7.4的底端通过抹平机连接板7.2与抹平机顶端面铰接;所述直流有刷电机的受控端与plc控制器14的输出端连接。由于抹平机在进行抹平作业时需要与模具上端表面贴合,悬臂与抹平机连接处采用铰接的连接方式,可以保证抹平机接触模具表面后能与模具紧密贴合,而抹平机连接板7.2上的活动铰链使得抹平机能够在模具上平稳移动。
57.为方便清洗搅拌浇注装置2和模具装夹机构3,进而保证下次使用时的干净、易脱模,本实用新型在框架的顶部还设置了第一清洗装置9和第二清洗装置12,第一清洗装置9用于清洗搅拌浇注装置2,第二清洗装置12用于清洗模具装夹机构3,框架上设置有清洗控制机13,清洗控制机13在plc控制器14的指令下控制第一清洗装置9和第二清洗装置12进行清洗作业。
58.第一清洗机构的结构如图13所示,包括固定连接在横梁之间的清洗水管固定板9.2,清洗水管固定板9.2的两端分别通过t型连接板9.1与横梁固定连接,清洗水管固定板9.2设置有若干第二万向喷头9.3,所有万向喷头9.3通过总水管连通,总水管上连通设置有第二快插公头9.4,第二快插公头9.4通过进水管与清洗控制机13连通。
59.第二清洗机构12的结构如图11和图12所示,包括设置在喷油机构8移动梁8.6底端面上的钢水管8.10,钢水管上设置有若干第一万向喷头8.11,钢水管通过进水管与清洗控制机13连通。
60.为方便固定进水管,本实用新型还在横梁上设置了进水管固定装置5,进水管固定装置5的结构如图8所示。
61.为避免清洗后的污水横流,本实用新型在框架的底部设置了收纳装置6,用于承接污水,收纳装置的结构如图9所示,包括底部带脚轮6.1的收纳盒6.3,收纳盒的出水口处设置有过滤装置6.2;收纳盒6.3的一侧侧壁上开设有连接孔6.4,用于连接手拉把柄,方便抽拉收纳盒。污水进入收纳盒后,残渣下沉,水分位于残渣上部,排放时便通过过滤装置的漏斗过滤网排除盒外,极大程度上避免了过滤装置堵塞的现象,为收集残渣提高了效率。本实施例中,采用两条角钢与横梁相连,将收纳盒底部脚轮放置其上,类似抽屉的形态,当收纳
盒收集之后,便可通过连接把柄抽走收纳盒倒入指定位置,清洗之后放入原位置;脚轮上带刹车机构,通过刹车将脚轮进行固定,方便进行下一次收集。
62.本实用新型的具体工作流程如下所述。
63.第一步,工人将装有模具盒的内置托盘放入外置托盘中。
64.第二步,工人推着混凝土小车,将所需混凝土人工倒入翻斗式上料装置的上料斗中,通过上料斗上自带的称重传感器和重量显示装置查看混凝土的量。
65.第三步,按下plc控制器上的上料按钮,上料斗中的混凝土向上行走并倒入搅拌机中;待料倒完后,上料斗返回初始位置。
66.第四步,plc控制器控制搅拌机开始搅拌,搅拌时间可设定,同时控制喷油机构对模具装夹机构3中的模具进行喷油,完成后喷油机构回到原点。
67.第五步,搅拌机的电动行车和手动行车在plc控制器的控制下在横梁上做直线运动,当搅拌机运动到第1组模具正上方,搅拌机行车停车,搅拌机电推杆伸出指定长度,推动搅拌机做圆周运动,运行到导流槽2.3与第一组模具距离最近时,搅拌机电推杆停止运动,此时搅拌机搅拌轴反转倒刮,将浆料刮入模具,然后搅拌轴停止反转,搅拌机电推杆拉动搅拌机回到起始位置。
68.第六步,搅拌机行车继续行走,运动到第2组模具正上方,搅拌机搅拌轴反转倒刮,将浆料刮入第2组模具;以此类推,直到全部模具都填满浆料。
69.第七步,浇注完成,plc控制器控制搅拌机电推杆收缩,搅拌机搅拌轴停止反转,搅拌机行车回到原点;同时plc控制器控制振动台开始振捣填实。
70.第八步,振捣完成后,plc控制器控制喷油机构的移动梁带动抹平装置行走,同时控制抹平装置的电机启动,抹平装置行车开始从左到右运动;抹平完成后,抹平装置电机停止,抹平装置行车回到原点。
71.本步骤中,抹平作业时主要有三个步骤:首先当电动跑车8.1开始运动,驱动抹平装置向前运动,使抹平机7.1底板与模具边缘接触;之后电动跑车8.1继续往前运动,由于抹平装置有两个活动铰链,抹平机开始缓慢转动逐渐与模具开始贴合;当抹平机7.1与模具充分贴合后,开始震动,抹平机开始作业;随着电动跑车8.1的继续移动模具表面被抹平,在到达模具最右端后,电动跑车8.1通过plc控制往返运动进行二次抹平。抹平完成,抹平装置退回未作业状态,电动跑车8.1移动至成型机的最右端,7.1抹平机被收入到右端的横梁下面,抹平工作完成。
72.为了保证试件的质量,可重复上述浇注与抹平动作。
73.第九步,待试件捣实、抹平后,托盘电推杆伸出,使外置托盘倾斜,工人控制叉车叉走带有混凝土试件的内置托盘至指定位置。
74.第十步,plc控制器通过控制清洗控制机,进一步控制第一清洗机构和第二清洗机构同时运作:清洗完托盘,第二清洗装置回到原点;第一清洗装置对搅拌机进行冲洗,搅拌机搅拌轴反转倒刮,搅拌机行车运动到收纳盒正上方,搅拌机电推杆伸出指定长度,将清洗的石子和污水倒入收纳盒;搅拌机电推杆收缩,搅拌机行车回到原点;翻斗下降回到原点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。