1.本实用新型涉及汽车卡扣装配领域,更具体地说,涉及一种汽车部件机器人装配卡扣系统。
背景技术:
2.汽车配件是构成汽车整体的各个单元及服务于汽车的一种产品。汽车配件的种类繁多,随着人们生活水平的提高,人们对汽车的消费也越来越多,汽车配件的这个市场变得也越来越大。近些年来汽车配件制造厂也在飞速地发展。
3.现有汽车塑胶件上的卡扣安装传统,主要通过人工进行安装,人工装卡扣作业速度慢,工人的流动性比较大。安装的卡扣疏漏,人工安装速度不一,时间长,不确定性多;工人对工作流程不熟悉,工作疏忽,疲劳工作等导致安全生产隐患,产量低、工序较多、装卡扣不一致,漏装等,造成不良品也会增加。
技术实现要素:
4.1.要解决的技术问题
5.本实用新型的目的在于提供一种汽车部件机器人装配卡扣系统,以解决上述背景技术中提出的问题。
6.2.技术方案
7.一种汽车部件机器人装配卡扣系统,包括机器人装配机构,所述机器人装配机构正面固设有流动作业平台,所述流动作业平台顶部呈线性等间距固设有多个产品仿形工装,所述机器人装配机构内部分别固设有安装装置和分料装置。
8.优选地,所述分料装置位于安装装置的左后方,所述流动作业平台位于安装装置正前方。
9.优选地,所述安装装置包括底座,所述底座顶部固设有机器人,所述机器人顶部固设有气动控制箱,所述机器人输出端固设有连接法兰,所述连接法兰底部固设有法兰连接杆。
10.优选地,所述法兰连接杆底部固设有法兰夹头顶板,所述法兰夹头顶板内壁呈线性等间距固设有多个笔形小型气缸,所述笔形小型气缸外壁固设有磁性开关。
11.优选地,所述笔形小型气缸固设有浮动接头,所述浮动接头底部固设有卡扣夹头,所述笔形小型气缸圆周外壁固设有真空电磁阀,所述法兰夹头顶板内壁呈线性等间距固设有多个滑轨,所述滑轨内壁滑动连接有滑块。
12.优选地,所述卡扣夹头与滑块连接固定。
13.3.有益效果
14.相比于现有技术,本实用新型的优点在于:
15.1、本实用新型在结构上有所改进,人工将产品放到流动作业平台上的产品仿形工装上,按下安装好按钮后,流动作业平台带动产品仿形工装移到装配区,气动控制箱通过控
制机器人运行,在磁性开关和真空电磁阀的配合下,笔形小型气缸通过卡扣夹头对分料装置上的卡扣进行抓取,机器人抓取卡扣移到安装位前,机器人从安装位顺卡位装入,安装完流动作业平台会带动产品仿形工装移到下一工位区;此设计能够提高产品的良率,减少人工,保证其一致性,一天可连续生产,改善工人劳动条件,降低对工人操作技术的要求缩短产品改型换代的周期,减少相应的投资成本。
16.2、本实用新型在结构上有所改进,通过在卡扣夹头上设置真空电磁阀,通过采用真空负压检测法,能及时有效的检测夹头上是否有无卡扣,提高安装的精准度。
附图说明
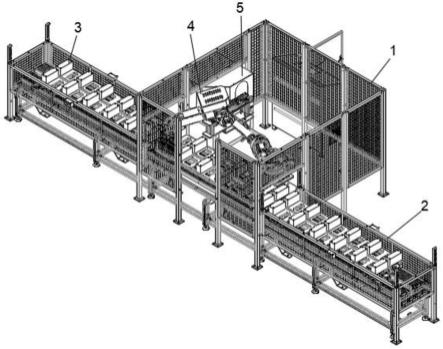
17.图1为本实用新型的整体结构示意图;
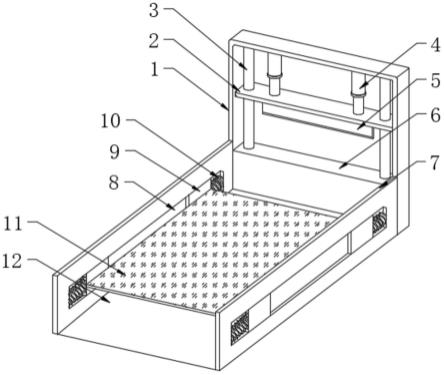
18.图2为本实用新型机器人的结构示意图;
19.图3为本实用新型的局部结构示意图;
20.图中标号说明:1、机器人装配机构;2、流动作业平台;3、产品仿形工装;4、安装装置;401、底座;402、机器人;403、气动控制箱;404、连接法兰;405、法兰连接杆;406、法兰夹头顶板;407、笔形小型气缸;408、磁性开关;409、浮动接头;410、卡扣夹头;411、真空电磁阀;412、滑轨;413、滑块;5、分料装置。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“设有”“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
22.请参阅图1-3,本实用新型提供一种技术方案:
23.一种汽车部件机器人装配卡扣系统,包括机器人装配机构1,机器人装配机构1正面固设有流动作业平台2,流动作业平台2顶部呈线性等间距固设有多个产品仿形工装3,机器人装配机构1内部分别固设有安装装置4和分料装置5;人工将产品放到流动作业平台2上的产品仿形工装3上,按下安装好按钮后,流动作业平台2带动产品仿形工装3移到装配区,气动控制箱通过控制机器人402运行,在磁性开关408和真空电磁阀411的配合下,笔形小型气缸407通过卡扣夹头410对分料装置5上的卡扣进行抓取,机器人402抓取卡扣移到安装位前,机器人402从安装位顺卡位装入,安装完流动作业平台2会带动产品仿形工装3移到下一工位区;此设计能够提高产品的良率,减少人工,保证其一致性,一天可连续生产;改善工人劳动条件,降低对工人操作技术的要求缩短产品改型换代的周期,减少相应的投资成本;通过在卡扣夹头410上设置真空电磁阀411,通过采用真空负压检测法,能及时有效的检测夹头上是否有无卡扣,提高安装的精准度。
24.具体的,分料装置5位于安装装置4的左后方,流动作业平台2位于安装装置4正前方。
25.进一步的,安装装置4包括底座401,底座401顶部固设有机器人402,机器人402顶部固设有气动控制箱403,气动控制箱采用不锈钢材料制成,具有很好的防蚀、抗震能力;易弯曲,编织网套的加强保护,使之具有更高的承压能力;连接方式多样;虹吸管用于烘缸内水的排出,效果好,机器人402输出端固设有连接法兰404,连接法兰404是在两个法兰盘之间加上法兰垫,最后用螺栓将两个法兰盘拉紧使其紧密结合起来的一种可拆卸的接头,连接法兰404底部固设有法兰连接杆405。
26.再进一步的,法兰连接杆405底部固设有法兰夹头顶板406,法兰夹头顶板406内壁呈线性等间距固设有多个笔形小型气缸407,笔形小型气缸407外壁固设有磁性开关408,smc磁性开关又叫磁控管,它同霍尔元件差不多,但原理性质不同,是利用磁场信号来控制的一种开关元件,无磁断开,可以用来检测电路或机械运动的状态。
27.更进一步的,笔形小型气缸407固设有浮动接头409,浮动接头409底部固设有卡扣夹头410,笔形小型气缸407圆周外壁固设有真空电磁阀411,法兰夹头顶板406内壁呈线性等间距固设有多个滑轨412,滑轨412内壁滑动连接有滑块413。
28.值得说明的是,卡扣夹头410与滑块413连接固定。
29.工作原理:人工将产品放到流动作业平台2上的产品仿形工装3上,按下安装好按钮后,流动作业平台2带动产品仿形工装3移到装配区,气动控制箱通过控制机器人402运行,在磁性开关408和真空电磁阀411的配合下,笔形小型气缸407通过卡扣夹头410对分料装置5上的卡扣进行抓取,机器人402抓取卡扣移到安装位前,机器人402从安装位顺卡位装入,安装完流动作业平台2会带动产品仿形工装3移到下一工位区。
30.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。