1.本公开涉及三轴传感器、传感器模块和电子装置。
背景技术:
2.近年来,随着劳动人口的减少,由机器人进行的工作自动化已在各种场景中得到研究。因此,已经研究了一种传感器,其通过安装在机器人的前表面上,检测作用于与前表面上的物体的接触区域上的力。检测作用于接触区域上的力的方向在机器人的控制中尤为重要。ptl 1公开了一种多轴力传感器,作为在多个轴上检测这种力的方向的传感器,该多轴力传感器包括布置在各个轴方向上的一轴的压力传感器,以具有整体检测多轴力矢量的功能。
3.引文列表
4.专利文献
5.ptl 1:日本未审专利申请公开号2016-205942
技术实现要素:
6.本发明要解决的问题
7.为了高度控制机器人的动作,希望能够检测多轴力作用于前表面的哪个部分和在哪个方向上作用。然而,如上面描述的ptl 1那样,在使用多个具有单个检测轴的压力传感器的组合来检测多轴力的情况下,传感器具有复杂的配置。
8.本公开的目的是提供一种具有相对简单配置的三轴传感器、传感器模块和电子装置。
9.解决问题的手段
10.为了解决上述问题,第一项公开是一种三轴传感器,包括:
11.第一检测层,其具有第一表面、以及在与所述第一表面相反侧的第二表面,并且包括电容型的第一感测部分;
12.第二检测层,其具有与所述第一检测层的所述第二表面相对的第一表面,并且包括电容型的第二感测部分;
13.第一导电层,其被设置为与所述第一检测层的所述第一表面相对;
14.第二导电层,其设置在所述第一检测层与所述第二检测层之间;
15.隔离层,其设置在所述第一检测层与所述第二导电层之间,以将所述第一检测层与所述第二导电层彼此隔离;
16.第一变形层,其设置在所述第一导电层与所述第一检测层之间,并且根据在传感器的厚度方向上作用的压力而弹性变形;以及
17.第二变形层,其设置在所述第二导电层与所述第二检测层之间,并且根据在所述传感器的厚度方向上作用的压力而弹性变形,其中
18.所述隔离层的25%cld值是所述第一变形层的25%cld值的10倍或更多倍,以及
19.所述隔离层的25%cld值是所述第二变形层的25%cld值的10倍或更多倍。
20.第二项公开是一种三轴传感器,包括:
21.第一检测层,其具有第一表面、以及在与所述第一表面相反侧的第二表面,并且包括电容型的第一感测部分;
22.第二检测层,其具有与所述第一检测层的所述第一表面相对的第一表面、以及在与所述第二检测层的所述第一表面相反侧的第二表面,并且包括电容型的第二感测部分;
23.隔离层,其设置在所述第一检测层与所述第二检测层之间,以将所述第一检测层与所述第二检测层彼此隔离;
24.第一导电层,其被设置为与所述第一检测层的所述第一表面相对;
25.第二导电层,其被设置为与所述第二检测层的所述第二表面相对;
26.第一变形层,其设置在所述第一导电层与所述第一检测层之间,并且根据在传感器的厚度方向上作用的压力而弹性变形;以及
27.第二变形层,其设置在所述第二导电层与所述第二检测层之间,并且根据在所述传感器的厚度方向上作用的压力而弹性变形,其中
28.所述隔离层的25%cld值是所述第一变形层的25%cld值的10倍或更多倍,以及
29.所述隔离层的25%cld值是所述第二变形层的25%cld值的10倍或更多倍。
30.第三项公开是一种传感器模块,其包括第一项公开或第二项公开的三轴传感器。
31.第四项公开是一种电子装置,其包括:
32.第三项公开的传感器模块;以及
33.计算部分,其基于从所述传感器模块输出的第一感测部分和第二感测部分的输出信号分布来计算三轴力。
附图说明
34.[图1]图1是示出根据本公开第一实施例的电子装置的配置的示例的框图。
[0035]
[图2]图2是示出传感器的配置的示例的横截面图。
[0036]
[图3]图3是示出检测层的配置的示例的平面图。
[0037]
[图4]图4是示出检测层的配置的示例的横截面图。
[0038]
[图5]图5是示出感测部分的配置的示例的平面图。
[0039]
[图6]图6是示出多条布线线路的布置的示例的平面图。
[0040]
[图7]图7是用于描述压力检测时的传感器的操作的示例的横截面图。
[0041]
[图8]图8是用于描述剪切力检测时的传感器的操作的示例的横截面图。
[0042]
[图9]图9是示出在仅压力作用于传感器的状态下第一检测层和第二检测层的输出信号分布的示例的图。
[0043]
[图10]图10是示出在剪切力作用于传感器的状态下第一检测层和第二检测层的输出信号分布的示例的图。
[0044]
[图11]图11是示出根据本公开第二实施例的传感器的配置的示例的横截面图。
[0045]
[图12]图12是用于描述压力检测时的传感器的操作的示例的横截面图。
[0046]
[图13]图13是用于描述剪切力检测时的传感器的操作的示例的横截面图。
[0047]
[图14]图14是示出根据本公开第三实施例的传感器的配置的示例的横截面图。
[0048]
[图15]图15是用于描述压力检测时的传感器的操作的示例的横截面图。
[0049]
[图16]图16是用于描述剪切力检测时的传感器的操作的示例的横截面图。
[0050]
[图17]图17是示出根据本公开第四实施例的传感器的配置的示例的横截面图。
[0051]
[图18]图18是用于描述压力检测时的传感器的操作的示例的横截面图。
[0052]
[图19]图19是用于描述剪切力检测时的传感器的操作的示例的横截面图。
[0053]
[图20]图20是示出根据本公开第五实施例的传感器的配置的示例的横截面图。
[0054]
[图21]图21是示出根据修改示例的传感器的配置的示例的分解透视图。
[0055]
[图22]图22是示出根据修改示例的传感器的配置的示例的横截面图。
[0056]
[图23]图23是示出根据修改示例的传感器的配置的示例的横截面图。
[0057]
[图24]图24是示出根据修改示例的传感器的配置的示例的横截面图。
[0058]
[图25]图25是示出根据修改示例的传感器的配置的示例的横截面图。
[0059]
[图26]图26是示出根据修改示例的传感器的配置的示例的横截面图。
[0060]
[图27]图27是示出根据应用示例的机器人手的配置的示例的示意图。
[0061]
[图28]图28是示出根据本公开第六实施例的传感器的配置的示例的横截面图。
[0062]
[图29]图29是示出根据修改示例的柔性印刷电路板的配置的示例的平面图。
[0063]
[图30]图30是沿图29的xxx-xxx线得到的横截面图。
[0064]
[图31]图31是示出根据修改示例的传感器的配置的示例的平面图。
[0065]
[图32]图32是沿图31的xxxii-xxxii线得到的横截面图。
[0066]
[图33]图33是示出根据修改示例的传感器的配置的示例的横截面图。
[0067]
[图34]图34是示出根据修改示例的传感器的配置的示例的平面图。
[0068]
[图35]图35是沿图34的xxxv-xxvx线得到的横截面图。
[0069]
[图36]图36是示出根据修改示例的传感器的配置的示例的横截面图。
[0070]
[图37]图37是示出根据修改示例的传感器的配置的示例的横截面图。
具体实施方式
[0071]
按以下顺序描述本公开的实施例。应注意,在示出以下实施例的所有附图中,相同或对应部分由相同的参考符号表示。
[0072]
1 第一实施例(传感器和包括传感器的电子装置的示例)
[0073]
2 第二实施例(传感器的示例)
[0074]
3 第三实施例(传感器的示例)
[0075]
4 第四实施例(传感器的示例)
[0076]
5 第五实施例(传感器的示例)
[0077]
6 第六实施例(传感器的示例)
[0078]
7 修改示例
[0079]
8 应用示例
[0080]
《1第一实施例》
[0081]
[电子装置的配置]
[0082]
图1是示出根据本公开第一实施例的电子装置10的配置的示例的框图。电子装置10包括传感器模块11、以及作为电子装置10的主体的主机设备12。主机设备12包括主cpu
(中央处理单元)(以下简称为“cpu”)12a、以及诸如壳体等外部材料(未示出),并且通过传感器模块11检测作用于所述外部材料的前表面上的三轴力,并且根据检测结果进行操作。
[0083]
(传感器模块)
[0084]
传感器模块11包括三轴传感器(以下简称“传感器”)20、作为第一控制部分的控制器ic(集成电路)(以下简称“ic”)13a、以及作为第二控制部分的ic 13b。传感器20设置在电子装置10的外部材料的前表面上。外部材料可以具有曲面,并且传感器20可以设置在该曲面上。传感器20被配置为能够以面分布来检测在传感器20的前表面与接触该前表面的物体之间作用的三轴力。传感器20将作用于传感器20上的压力和剪切力检测为电容分布,并将检测结果输出到ic 13a和ic 13b。
[0085]
ic 13a和ic 13b的每一个控制传感器20以获取与作用于传感器20上的压力和剪切力相对应的电容分布,并将该获取的结果输出到主机设备12的cpu 12a。cpu 12a基于来自ic 13a和ic 13b的输出信号(电容分布)计算施加到传感器20的三轴力,并基于该计算的结果执行主机设备12的各种控制。
[0086]
[传感器的配置]
[0087]
图2是示出传感器20的配置的示例的横截面图。传感器20是能够检测三轴力分布的电容型传感器,并且检测作用于传感器20的前表面上的压力和在传感器20的面内方向上的剪切力。传感器20具有膜形状。在本公开中,定义了膜也包含片材。由于传感器20具有膜形状,因此不仅适用于平面,而且也适用于曲面。在本说明书中,在平坦状态下的传感器20的前表面的平面内相互正交的轴被分别称为x轴和y轴,并且垂直于平坦状态下的传感器20的前表面的轴被称为z轴。
[0088]
传感器20包括检测层(第一检测层)21a、检测层(第二检测层)21b、隔离层22、变形层(第一变形层)23a、变形层(第二变形层)23b、导电层(第一导电层)24a、以及导电层(第二导电层)24b。在传感器20的各层之间提供未图示的粘合层,以将各层接合在一起。然而,在两个相邻层中的至少一个具有粘合性的情况下,可以不提供粘合层。传感器20的两个表面之中的在导电层24a侧的第一表面是检测压力和剪切力的感测表面20s,并且在与感测表面20s相反侧的第二表面是接合到诸如壳体等外部材料的背面。检测层21a连接至ic 13a,并且检测层21b连接至ic 13b。
[0089]
检测层21a具有第一表面21as1、以及在与第一表面21as1相反侧的第二表面21as2。检测层21b具有与第一表面21as1相对的第一表面21bs1、以及在与第一表面21bs1相反侧的第二表面21bs2。检测层21a和检测层21b彼此平行地布置。隔离层22设置在检测层21a与检测层21b之间。导电层24a被设置为与检测层21a的第一表面21as1相对。导电层24a平行于检测层21a布置。导电层24b被设置为与检测层21b的第二表面21bs2相对。导电层24b平行于检测层21b布置。变形层23a设置在检测层21a与导电层24a之间。变形层23b设置在检测层21b与导电层24b之间。
[0090]
(检测层)
[0091]
检测层21a和检测层21b是电容型的检测层,更具体地说,是互电容型的检测层。检测层21a具有柔性。在压力作用于感测表面20s的情况下,检测层21a朝向检测层21b弯曲。检测层21a包括多个感测部分(第一感测部分)se21。感测部分se21检测作用于感测表面20s上的压力,并将检测结果输出到ic 13a。具体地,感测部分se21检测与感测部分se21与导电层
24a之间的距离相对应的电容,并将检测结果输出到ic 13a。
[0092]
检测层21b具有柔性。在压力作用于感测表面20s的情况下,检测层21b朝向导电层24b弯曲。检测层21b包括多个感测部分(第二感测部分)se22。感测部分se22检测作用于感测表面20s上的压力,并将检测结果输出到ic 13b。具体地,感测部分se22检测与感测部分se22与导电层24b之间的距离相对应的电容,并将检测结果输出到ic 13b。
[0093]
包括在检测层21a中的多个感测部分se21的布置间距p1与包括在检测层21b中的多个感测部分se22的布置间距p2彼此相同。在没有施加剪切力的初始状态下,感测部分se22被设置在与感测部分se21相对的位置。也就是说,在没有施加剪切力的初始状态下,感测部分se22和感测部分se22在传感器20的厚度方向上彼此重叠。然而,在没有施加剪切力的初始状态下,感测部分se22也可以被配置为不设置在与感测部分se21相对的位置。
[0094]
检测层21b具有与检测层21a相似的配置;因此,下面仅描述检测层21a的配置。
[0095]
图3是示出检测层21a的配置的示例的平面图。多个感测部分se21以矩阵形式布置。感测部分se21的每一个具有例如正方形。然而,每个感测部分se21的形状不受特别限制,并且可以是圆形、椭圆形、除正方形以外的多边形等。
[0096]
应注意,在图3中,参考符号x1至x10分别表示感测部分se21在x轴方向上的中心位置,参考符号y1至y10分别表示感测部分se21在y轴方向上的中心位置。
[0097]
具有膜形状的连接部分21a1从检测层21a的外边缘的一部分延伸。在连接部分21a1的端部设置用于与传感器基板(未示出)连接的多个连接端子21a2。ic 13a和ic 13b设置在传感器基板上。
[0098]
检测层21a和连接部分21a1优选地通过一个柔性印刷电路板(柔性印刷电路:fpc)集成地配置。通过以这种方式集成地配置检测层21a和连接部分21a1,能够减少传感器20的组件的数量。此外,还能够提高传感器20与传感器基板之间的连接的冲击耐久性。
[0099]
图4是示出检测层21a的配置的示例的横截面图。检测层21a包括基底31、多个感测部分se21、多条布线线路32、多条布线线路33、覆盖膜34a、覆盖膜34b、粘合层35a和粘合层35b。
[0100]
基底31具有第一表面31s1、以及在与该第一表面31s1相反侧的第二表面31s2。多个感测部分se21和多条布线线路32设置在基底31的第一表面31s1上。多条布线线路33设置在基底的第二表面31s2上。覆盖膜34a通过粘合层35a接合到基底31的设有多个感测部分se21和多条布线线路32的第一表面31s1。覆盖膜34b通过粘合层35b接合到基底31的设有多条布线线路33的第二表面31s2。
[0101]
基底31具有柔性。基底31具有膜形状。基底31a包括聚合物树脂。聚合物树脂的示例包括聚对苯二甲酸乙二醇酯(pet)、聚萘二甲酸乙二醇酯(pen)、聚碳酸酯(pc)、丙烯酸树脂(pmma)、聚酰亚胺(pi)、三乙酰纤维素(tac)、聚酯、聚酰胺(pa)、芳纶、聚乙烯(pe)、聚丙烯酸酯、聚醚砜、聚砜、聚丙烯(pp)、双乙酰纤维素、聚氯乙烯、环氧树脂、脲树脂、聚氨酯树脂、三聚氰胺树脂、环烯烃聚合物(cop)、降冰片烯基热塑性树脂等;然而,聚合物树脂不限于这些聚合物树脂。
[0102]
图5是示出感测部分se21的配置的示例的平面图。感测部分se21包括感测电极(接收电极(第一电极))36和脉冲电极(发送电极(第二电极))37。感测电极36和脉冲电极37被配置为能够形成电容耦合。更具体地说,感测电极36和脉冲电极37的每一个具有梳状,并且
被布置成使其梳状部分彼此啮合。
[0103]
在x轴方向上相邻的感测电极36通过连接线36a彼此连接。为每个脉冲电极37提供布线线路37a,该布线线路37a的端部经由通孔37b连接至布线线路33。布线线路33将在y轴方向上相邻的脉冲电极37彼此连接。
[0104]
图6是示出多条布线线路32和多条布线线路33的布置的示例的平面图。布线线路32从通过多条连接线36a彼此连接的多个感测电极36之中的位于x轴方向上的一端处的感测电极36引出。多条布线线路32被布线至基底31的第一表面31s1的外边缘部分,以经由连接部分21a1连接至连接端子21a2。
[0105]
检测层21a进一步包括多条布线线路38。布线线路38连接至从通过布线线路33彼此连接的多个脉冲电极37之中的位于y轴方向上的一端处的脉冲电极37引出的布线线路37a。多条布线线路38与多条布线线路32一起布线至基底31的第一表面31s1的外边缘部分,以经由连接部分21a1连接至连接端子21a2。
[0106]
检测层21a进一步包括接地电极39a和接地电极39b。接地电极39a和接地电极39b连接至参考电位。接地电极39a和接地电极39b平行于多条布线线路32延伸。多条布线线路32设置在接地电极39a与接地电极39b之间。通过以这种方式在接地电极39a与接地电极39b之间设置多条布线线路32,能够防止外部噪声(外部电场)进入多条布线线路32。这使得能够抑制由于外部噪声导致的传感器20的检测精度降低或错误检测。
[0107]
(隔离层)
[0108]
隔离层22将检测层21a与检测层21b彼此隔离。这使得能够抑制检测层21a与检测层21b之间的电磁干扰。隔离层22被配置为通过在感测表面20s的面内方向(即,传感器20的面内方向)上作用的剪切力而在感测表面20s的面内方向上可弹性变形。
[0109]
隔离层22优选包括凝胶。包括凝胶的隔离层22抵抗通过作用于感测表面20s上的压力导致的挤压变形,容易通过在感测表面20s的面内方向上作用的剪切力而弹性变形,由此获得作为隔离层22的期望特性。凝胶例如是从包括硅凝胶、聚氨酯凝胶、丙烯酸凝胶和苯乙烯凝胶的组中选择的至少一种的聚合物凝胶。隔离层22可由未图示的基底支撑。
[0110]
隔离层22的25%cld(压缩荷载挠度,compression-load-deflection)值是变形层23a的25%cld值的10倍或更多倍,优选为变形层23a的25%cld值的30倍或更多倍,更优选为变形层23a的25%cld值的50倍或更多倍。在隔离层22的25%cld值是变形层23a的25%cld值的10倍或更多倍的情况下,当压力作用于感测表面20s时,与隔离层22相比,变形层23a足够容易地被挤压变形,这使得能够提高感测部分se21的检测灵敏度。
[0111]
隔离层22的25%cld值是变形层23b的25%cld值的10倍或更多倍,优选为变形层23b的25%cld值的30倍或更多倍,更优选为变形层23b的25%cld值的50倍或更多倍。在隔离层22的25%cld值是变形层23b的25%cld值的10倍或更多倍的情况下,当压力作用于感测表面20s时,与隔离层22相比,变形层23b足够容易被挤压变形,这使得能够提高感测部分se22的检测灵敏度。
[0112]
隔离层22的25%cld值优选为500kpa或更小。在隔离层22的25%cld值超过500kpa的情况下,可能难以通过在感测表面20s的面内方向(即,传感器20的面内方向)上作用的剪切力使隔离层22在感测表面20s的面内方向上弹性变形。因此,可能降低对传感器20的面内方向上的剪切力的检测灵敏度。
[0113]
隔离层22、变形层23a和变形层23b的25%cld值根据jis k 6254测量。
[0114]
隔离层22的厚度优选为变形层23a的厚度的两倍或更多倍,更优选为变形层23a的厚度的四倍或更多倍,进一步更优选为变形层23a的厚度的八倍或更多倍。当隔离层22的厚度是变形层23a的厚度的两倍或更多倍时,在剪切力在感测表面20s的面内方向上作用的情况下,与变形层23a相比,隔离层22能够在感测表面20s的面内方向上足够容易地变形。这使得进一步提高对剪切力的检测灵敏度成为可能。
[0115]
隔离层22的厚度优选为变形层23b的厚度的两倍或更多倍,更优选为变形层23b的厚度的四倍或更多倍,进一步更优选为变形层23b的厚度的八倍或更多倍。当隔离层22的厚度是变形层23b的厚度的两倍或更多倍时,在剪切力在感测表面20s的面内方向上作用的情况下,与变形层23b相比,隔离层22能够在感测表面20s的面内方向上足够容易地变形。这使得进一步提高对剪切力的检测灵敏度成为可能。
[0116]
隔离层22的厚度优选为10000μm或更小,更优选为4000μm或更小。在隔离层22的厚度超过10000μm的情况下,可能难以使传感器20适用于电子装置等。
[0117]
隔离层22、变形层23a和变形层23b的厚度被如下确定。首先,通过fib(聚焦离子束,focused ion beam)方法等处理传感器20以形成横截面,并且使用扫描电子显微镜(scanning electron microscope:sem)拍摄横截面的图像。接下来,使用该横截面的图像测量隔离层22、变形层23a和变形层23b的厚度。
[0118]
隔离层22的基重(basis weight)优选为变形层23a的基重的10倍或更多倍,且更优选为变形层23a的基重的25倍或更多倍。在隔离层22的基重为变形层23a的基重的10倍或更多倍的情况下,当压力作用于感测表面20s时,与隔离层22相比,变形层23a足够容易被挤压变形,这使得能够进一步提高感测部分se21的检测灵敏度。
[0119]
隔离层22的基重优选为变形层23b的基重的10倍或更多倍,且更优选为变形层23b的基重的25倍或更多倍。在隔离层22的基重为变形层23b的基重的10倍或更多倍的情况下,当压力作用于感测表面20s时,与隔离层22相比,变形层23b足够容易被挤压变形,这使得能够进一步提高感测部分se22的检测灵敏度。
[0120]
隔离层22的基重优选为1000mg/cm2或更小。在隔离层22的基重超过1000mg/cm2的情况下,可能难以通过在感测表面20s的面内方向(即,传感器20的面内方向)上作用的剪切力使隔离层22在感测表面20s的面内方向上弹性变形。因此,可能降低对传感器20的面内方向上的剪切力的检测灵敏度。
[0121]
隔离层22的基重被如下确定。首先,在通过从传感器20剥离导电层24a、变形层23a和检测层21a等方式暴露隔离层22的前表面之后,测量此状态下的传感器20的质量m1。接下来,在通过用溶剂溶解隔离层22等方式去除隔离层22之后,测量此状态下的传感器20的质量m2。最后,通过以下表达式确定变形层23的基重。
[0122]
隔离层22的基重[mg/cm2]=(质量m1-质量m2)/(隔离层22的面积s1)
[0123]
变形层23a的基重被如下确定。首先,在通过从传感器20剥离导电层24a等方式暴露变形层23a的前表面之后,测量此状态下的传感器20的质量m3。接下来,在通过用溶剂溶解变形层23a等方式去除变形层23a之后,测量此状态下的传感器20的质量m4。最后,通过以下表达式确定变形层23a的基重。
[0124]
变形层23a的基重[mg/cm2]=(质量m3-质量m4)/(变形层23a的面积s2)
[0125]
变形层23b的基重被如下确定。首先,在通过从传感器20剥离导电层24b等方式暴露变形层23b的前表面之后,测量此状态下的传感器20的质量m5。接下来,在通过用溶剂溶解变形层23b等方式去除变形层23b之后,测量此状态下的传感器20的质量m6。最后,通过以下表达式确定变形层23b的基重。
[0126]
变形层23b的基重[mg/cm2]=(质量m5-质量m6)/(变形层23b的面积s3)
[0127]
(导电层)
[0128]
导电层24a具有柔性或弹性中的至少一种。在压力作用于感测表面20s的情况下,导电层24a朝向检测层21a弯曲。导电层24b可以具有或者可以不具有柔性或弹性中的至少一种;然而,为了使传感器20可安装在曲面上,优选的是导电层24b具有柔性。
[0129]
导电层24a具有第一表面24as1、以及在与第一表面24as1相反侧的第二表面24as2。第二表面24as2与检测层21a的第一表面21as1相对。导电层24b具有第一表面24bs1、以及在与第一表面24bs1相反侧的第二表面24bs2。第一表面24bs1与检测层21b的第二表面21bs2相对。
[0130]
导电层24a的弹性模量优选为10mpa或更小。在导电层24a的弹性模量为10mpa或更小的情况下,导电层24a的柔性提高,并且当压力作用于感测表面20s时,压力容易传递到检测层21b,这使得容易使检测层21b变形。这使得能够提高感测部分se22的检测灵敏度。上述弹性模量根据jis k 7161测量。
[0131]
导电层24a和导电层24b是所谓的接地电极,并且连接至参考电位。导电层24a和导电层24b的形状的示例包括膜形状、箔形状、或网格形状等;然而,导电层24a和导电层24b的形状不限于这些形状。导电层24a和导电层24b中的每一个可以由未图示的基底支撑。
[0132]
如果导电层24a和24b具有导电性就足够了,导电层24a和24b的示例包括:包括无机导电材料的无机导电层,包括有机导电材料的有机导电层,包括无机导电材料和有机导电材料两者的有机-无机导电层等。无机导电材料和有机导电材料可以是粒子。导电层24a和24b也可以是导电布。
[0133]
无机导电材料的示例包括金属、金属氧化物等。这里定义的是,金属包括半金属。金属的示例包括诸如铝、铜、银、金、铂、钯、镍、锡、钴、铑、铱、铁、钌、锇、锰、钼、钨、铌、钽、钛、铋、锑和铅等金属以及包括两种或两种以上类型的这些金属的合金等;然而,金属并不限于这些金属。合金的一个具体例子是不锈钢;然而,该合金不限于此。金属氧化物的示例包括氧化铟锡(ito)、氧化锌、氧化铟、掺锑氧化锡、掺氟氧化锡、掺铝氧化锌、掺镓氧化锌、掺硅氧化锌、氧化锌氧化锡系统、氧化铟氧化锡系统、氧化锌氧化铟氧化镁系统等;然而,金属氧化物并不限于这些金属氧化物。
[0134]
有机导电材料的示例包括碳材料、导电聚合物等。碳材料的示例包括炭黑、碳纤维、富勒烯、石墨烯、碳纳米管、碳微线圈、纳米角等;然而,碳材料并不限于这些碳材料。作为导电聚合物,例如,可使用取代或未取代的聚苯胺、聚吡咯、聚噻吩等;然而,导电聚合物不限于这些导电聚合物。
[0135]
导电层24a和24b可以是通过干法工艺和湿法工艺中的任一种制备的膜。作为干式工艺,例如,可以使用溅射法、蒸发法等;然而,干法工艺并不特别限于这些方法。
[0136]
通过在传感器20的两个表面上设置导电层24a和24b,可以防止外部噪声(外部电场)从传感器20的两个主表面侧进入传感器20内。这使得能够抑制由于外部噪声导致的传
感器20的检测精度降低或错误检测。
[0137]
(变形层)
[0138]
变形层23a将检测层21a与导电层24a彼此隔离,以使检测层21a和导电层24a彼此平行。可以通过变形层23a的厚度来调整感测部分se21的灵敏度和动态范围。变形层23a被配置为根据作用于感测表面20s上的压力,即,在传感器20的厚度方向上作用的压力,而可弹性变形。变形层23a可由未图示的基底支撑。
[0139]
变形层23b将检测层21b与导电层24b彼此隔离,以使检测层21b和导电层24b彼此平行。可以通过变形层23b的厚度来调整感测部分se22的灵敏度和动态范围。变形层23b被配置为根据作用于感测表面20s上的压力,即,在传感器20的厚度方向上作用的压力,而可弹性变形。变形层23a可由未图示的基底支撑。
[0140]
变形层23a和变形层23b的25%cld值可以相同或基本相同。变形层23a和23b的每一个包括例如泡沫树脂、绝缘弹性体等。泡沫树脂是所谓的海绵,并且例如是泡沫聚氨酯(聚氨酯泡沫)、泡沫聚乙烯(聚乙烯泡沫)、泡沫聚烯烃(聚烯烃泡沫)、泡沫丙烯酸(丙烯酸泡沫)、海绵橡胶等中的至少一种。例如,绝缘弹性体是硅基弹性体、丙烯酸基弹性体、聚氨酯基弹性体、苯乙烯基弹性体等中的至少一种。
[0141]
(粘合层)
[0142]
粘合层包括具有绝缘性的粘合剂或双面粘合膜。作为粘合剂,例如,可以使用丙烯酸基粘合剂、硅基粘合剂或聚氨酯基粘合剂中的至少一种。应注意,在本公开中,压敏粘合(pressure sensitive adhesion)被定义为粘合(adhesion)的一种。根据该定义,压敏粘合层被视为粘合层的一种。
[0143]
[传感器的操作]
[0144]
(压力检测时的传感器的操作)
[0145]
图7是用于描述压力检测时的传感器20的操作的示例的横截面图。在通过物体41按压感测表面20s以使压力作用于感测表面20s的情况下,导电层24a以压力作用点为中心朝向检测层21a弯曲,以使变形层23a的一部分挤压变形。这使得导电层24a的一部分和检测层21a的一部分彼此接近。结果,在检测层21a之中的接近导电层24a的部分中包括的多个感测部分se21的电力线的一部分(即,感测电极36与脉冲电极37之间的电力线的一部分)流向导电层24a,以改变多个感测部分se21的电容。
[0146]
此外,压力通过如上所述挤压变形的变形层23a的一部分而作用于检测层21a的第一表面21as1,并且检测层21a、隔离层22和检测层21b的每一个以压力作用点为中心朝向导电层24b弯曲。这使得检测层21b的一部分和导电层24b的一部分彼此接近。结果,在检测层21b之中的接近导电层24b的部分中包括的多个感测部分se22的电力线的一部分(即,感测电极36与脉冲电极37之间的电力线的一部分)流向导电层24b,以改变多个感测部分se22的电容。
[0147]
ic 13a顺序扫描在检测层21a中包括的多个感测部分se21,以获取来自多个感测部分se21的输出信号分布,即电容分布。
[0148]
类似地,ic 13b顺序扫描在检测层21b中包括的多个感测部分se22,以获取来自多个感测部分se21的输出信号分布,即电容分布。ic 13a和ic 13b将获取的输出信号分布输出到主机设备12的cpu 12a。
[0149]
cpu 12a基于从ic 13a接收的输出信号分布,计算压力大小和压力作用位置。基于ic13a的输出信号分布计算压力大小和压力作用位置的原因是与检测层21b相比,检测层21a更接近感测表面20s并且具有更高的检测灵敏度。然而,cpu 12a也可以基于从ic 13b接收的输出信号分布计算压力大小和压力作用位置,或者可以基于从ic 13a和ic 13b两者接收的输出信号分布计算压力大小和压力作用位置。
[0150]
(剪切力检测时的传感器的操作)
[0151]
图8是用于描述剪切力检测时的传感器20的操作的示例的横截面图。在物体41在感测表面20s的面内方向上移动并且剪切力作用于传感器20的情况下,隔离层22在传感器20的面内方向上弹性变形,并且检测层21a和检测层21b在传感器20的面内方向(x和y方向)上的相对位置发生移位。即,传感器20的面内方向上的感测部分se21和感测部分se22的相对位置发生移位。这使得检测层21a的输出信号分布(电容分布)的重心位置和检测层21b的输出信号分布(电容分布)的重心位置在传感器20的面内方向(x和y方向)上移位。应注意,为了检测剪切力,有必要通过物体41将压力作用于感测表面20s上;然而,图8中未图示由该压力导致的传感器20的各层的变形。
[0152]
图9是示出在仅压力作用于传感器20的状态下检测层21a的输出信号分布db1和检测层21b的输出信号分布db2的示例的图。输出信号分布db1和输出信号分布db2的每一个对应于电容分布(压力分布)。在仅压力作用于传感器20的状态下,检测层21a的输出信号分布db1的重心位置和检测层21b的输出信号分布db2的重心位置彼此一致。
[0153]
图10是示出在剪切力作用于传感器20的状态下检测层21a的输出信号分布db1和检测层21b的输出信号分布db2的示例的图。在剪切力作用于传感器20的状态下,检测层21a的输出信号分布db1的重心位置和检测层21b的输出信号分布db2的重心位置发生移位。
[0154]
cpu 12a基于从传感器模块11输出的检测层21a的输出信号分布和检测层21b的输出信号分布,计算三轴力。更具体地说,cpu 12a根据检测层21a的输出信号分布db1计算检测层21a中的压力重心位置,并根据检测层21b的输出信号分布db2计算检测层21b中的压力重心位置。cpu 12a根据检测层21a中的压力重心位置与检测层21b中的压力重心位置之间的差来计算剪切力的大小和方向。
[0155]
[效果]
[0156]
如上所述,在根据第一实施例的传感器20中,可以整体以相对简单和节省空间的配置来检测三轴力分布。此外,可以在感测表面20s的有效区域的任何位置检测三轴力分布。
[0157]
相比之下,如上述ptl 1那样,在多轴力传感器包括多个具有单个检测轴的压力传感器的组合以检测多轴力的情况下,多轴力传感器的配置变得复杂。此外,在布置多个多轴力传感器以便执行表面分布中的检测的情况下,占用了大空间。
[0158]
《2第二实施例》
[0159]
[传感器的配置]
[0160]
图11是示出根据本公开第二实施例的传感器20a的配置的示例的横截面图。传感器20a与根据第一实施例的传感器20的不同之处在于,包括具有层叠结构的隔离层25,以代替隔离层22(参见图2)。应注意,在第二实施例中,与第一实施例的组件相似的组件由相同的参考符号表示,并且省略对其的描述。
[0161]
(隔离层)
[0162]
隔离层25包括导电层(第三导电层)24c、隔离层(第一隔离层)25a、和隔离层(第二隔离层)25b。导电层24c设置在隔离层25a与隔离层25b之间。隔离层25a设置在检测层21a与导电层24c之间,以将检测层21a与导电层24c彼此隔离。隔离层25b设置在检测层21b与导电层24c之间,以将检测层21b与导电层24c彼此隔离。隔离层25a和隔离层25b被配置为通过在感测表面20s的面内方向(即,传感器20的面内方向)上作用的剪切力而在感测表面20s的面内方向上可弹性变形。
[0163]
隔离层25a和隔离层25b的材料与第一实施例中的隔离层22的材料相似。
[0164]
隔离层25a和隔离层25b中的每一个的25%cld值是变形层23a的25%cld值的10倍或更多倍,优选为变形层23a的25%cld值的30倍或更多倍,更优选为变形层23a的25%cld值的50倍或更多倍。在隔离层25a和隔离层25b中的每一个的25%cld值是变形层23a的25%cld值的10倍或更多倍的情况下,可以提高感测部分se21的检测灵敏度。
[0165]
隔离层25a和隔离层25b的每一个的25%cld值是变形层23b的25%cld值的10倍或更多倍,优选为变形层23b的25%cld值的30倍或更多倍,更优选为变形层23b的25%cld值的50倍或更多倍。在隔离层25a和隔离层25b中的每一个的25%cld值是变形层23b的25%cld值的10倍或更多倍的情况下,可以提高感测部分se22的检测灵敏度。
[0166]
隔离层25a和隔离层25b的每一个的25%cld值优选为500kpa或更小。在隔离层25a和隔离层25b中的每一个的25%cld值超过500kpa的情况下,可能难以通过在感测表面20s的面内方向(即,传感器20a的面内方向)上作用的剪切力使隔离层25a和隔离层25b在感测表面20s的面内方向上弹性变形。因此,可能降低对传感器20a的面内方向上的剪切力的检测灵敏度。
[0167]
隔离层25a和隔离层25b的25%cld值根据jis k 6254测量。
[0168]
隔离层25a和隔离层25b的总厚度优选为变形层23a的厚度的两倍或更多倍,更优选为变形层23a的厚度的四倍或更多倍,更优选为变形层23a的厚度的八倍或更多倍。在隔离层25a和隔离层25b的总厚度是变形层23a的厚度的两倍或更多倍的情况下,能够进一步提高对剪切力的检测灵敏度。
[0169]
隔离层25a和隔离层25b的总厚度优选为变形层23b的厚度的两倍或更多倍,更优选为变形层23b的厚度的四倍或更多倍,更优选为变形层23b的厚度的八倍或更多倍。在隔离层25a和隔离层25b的总厚度是变形层23b的厚度的两倍或更多倍的情况下,能够进一步提高对剪切力的检测灵敏度。
[0170]
隔离层25a和隔离层25b的总厚度优选为10000μm或更小,更优选为4000μm或更小。在隔离层25a和隔离层25b的总厚度超过10000μm的情况下,可能难以使传感器20a适用于电子装置等。
[0171]
隔离层25a和隔离层25b的厚度通过与在第一实施例中测量隔离层22的厚度的方法相似的方法确定。
[0172]
隔离层25a和隔离层25b的总基重优选为变形层23a的基重的10倍或更多倍,更优选为变形层23b的基重的25倍或更多倍。在隔离层25a和隔离层25b的总基重是变形层23a的基重的10倍或更多倍的情况下,能够进一步提高感测部分se21的检测灵敏度。
[0173]
隔离层25a和隔离层25b的总基重优选为变形层23b的基重的10倍或更多倍,更优
选为变形层23b的基重的25倍或更多倍。在隔离层25a和隔离层25b的总基重是变形层23b的基重的10倍或更多倍的情况下,能够进一步提高感测部分se22的检测灵敏度。
[0174]
隔离层25a和隔离层25b的总基重优选为1000mg/cm2或更小。在隔离层25a和隔离层25b的总基重超过1000mg/cm2的情况下,可能难以通过在感测表面20s的面内方向(即,传感器20a的面内方向)上作用的剪切力使隔离层25a和隔离层25b在感测表面20s的面内方向上弹性变形。因此,可能降低对传感器20a的面内方向上的剪切力的检测灵敏度。
[0175]
隔离层25a和隔离层25b的基重通过与在第一实施例中测量隔离层22的基重的方法相似的方法确定。
[0176]
(导电层)
[0177]
如上所述,导电层24c设置在隔离层25a与隔离层25b之间,以抑制检测层21a与检测层21b之间的电磁干扰。导电层24c具有柔性或弹性中的至少一种。在压力作用于感测表面20s的情况下,导电层24c朝向检测层21b弯曲。导电层24c的形状和材料与第一实施例中的导电层24a的形状和材料相似。
[0178]
[传感器的操作]
[0179]
(压力检测时的传感器的操作)
[0180]
图12是用于描述压力检测时的传感器20a的操作的示例的横截面图。压力检测时的传感器20a的操作与第一实施例中压力检测时的传感器20的操作相似,但以下几点除外。在通过物体41按压感测表面20s,并且压力通过挤压变形的变形层23a的一部分而作用于检测层21a的第一表面21as1的情况下,检测层21a、隔离层25、和检测层21b中的每一个以压力作用点为中心朝向导电层24b弯曲。
[0181]
(剪切力检测时的传感器的操作)
[0182]
图13是用于描述剪切力检测时的传感器20a的操作的示例的横截面图。剪切力检测时的传感器20a的操作与第一实施例中压力检测时的传感器20a的操作相似,但以下几点除外。在剪切力作用于传感器20的情况下,隔离层25a和隔离层25b在传感器20的面内方向上弹性变形,并且检测层21a和检测层21b在传感器20的面内方向上的相对位置发生移位。
[0183]
[效果]
[0184]
根据第二实施例的传感器20a进一步包括检测层21a与检测层21b之间的导电层24c。这使得能够进一步抑制检测层21a与检测层21b之间的电磁干扰。因此,与根据第一实施例的传感器20相比,在传感器20a中,可以进一步抑制检测精度的降低或错误检测。
[0185]
《3第三实施例》
[0186]
[传感器的配置]
[0187]
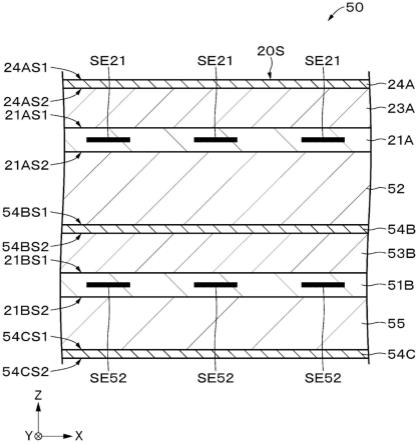
图14是示出根据第三实施例的传感器50的配置的示例的横截面图。传感器50包括检测层(第一检测层)21a、检测层(第二检测层)51b、隔离层52、变形层(第一变形层)23a、变形层(第二变形层)53b、导电层(第一导电层)24a、导电层(第二导电层)54b、导电层(第三导电层)54c和粘合层55。应注意,导电层54c和粘合层55可以根据需要被包括在内,并且也可以不被包括在内。应当注意,在第三实施例中,与第一实施例的组件相似的组件由相同的参考符号表示,并且省略对其的描述。
[0188]
除了检测层51b与粘合层55之间以及导电层54c与粘合层55之间以外,在传感器50的各层之间设置未图示的粘合层,以将各层接合在一起。然而,在两个相邻层中的至少一个
具有粘合性的情况下,可以不提供粘合层。
[0189]
检测层51b具有与检测层21a的第二表面21as2相对的第一表面51bs1、以及在与第一表面51bs1相反侧的第二表面51bs2。检测层21a和检测层51b彼此平行地布置。导电层54b设置在检测层21a与检测层51b之间。导电层54b平行于检测层21a和检测层51b布置。导电层54c被设置为与检测层51b的第二表面51bs2相对。导电层54b平行于检测层51b布置。隔离层52设置在检测层21a与导电层54b之间。粘合层55设置在检测层51b与导电层54c之间。
[0190]
(检测层)
[0191]
检测层51b是互电容型的检测层。检测层51b包括多个感测部分(第二感测部分)se52。感测部分se52检测作用于感测表面20s上的压力,并将检测结果输出到ic 13b。具体地,感测部分se52检测与感测部分se52和导电层54b之间的距离相对应的电容,并将检测结果输出到ic 13b。
[0192]
检测层51b的配置与第一实施例中的检测层21a的配置相似。
[0193]
(隔离层)
[0194]
隔离层52将检测层21a与导电层54b彼此隔离。隔离层52被配置为通过在感测表面20s的面内方向(即,传感器50的面内方向)上作用的剪切力而在感测表面20s的面内方向上可弹性变形。
[0195]
隔离层52的材料与第一实施例中的隔离层22的材料相似。
[0196]
隔离层52的25%cld值是变形层23a的25%cld值的10倍或更多倍,优选为变形层23a的25%cld值的30倍或更多倍,更优选为变形层23a的25%cld值的50倍或更多倍。在隔离层52的25%cld值是变形层23a的25%cld值的10倍或更多倍的情况下,可以提高感测部分se21的检测灵敏度。
[0197]
隔离层52的25%cld值是变形层53b的25%cld值的10倍或更多倍,优选为变形层53b的25%cld值的30倍或更多倍,更优选为变形层53b的25%cld值的50倍或更多倍。在隔离层52的25%cld值是变形层53b的25%cld值的10倍或更多倍的情况下,可以提高感测部分se52的检测灵敏度。
[0198]
隔离层52的25%cld值优选为500kpa或更小。在隔离层52的25%cld值超过500kpa的情况下,可能难以通过在感测表面20s的面内方向(即,传感器50的面内方向)上作用的剪切力使隔离层52在感测表面20s的面内方向上弹性变形。因此,可能降低对传感器50的面内方向上的剪切力的检测灵敏度。
[0199]
隔离层52和变形层53b的25%cld值根据jis k 6254测量。
[0200]
隔离层52的厚度优选为变形层23a的厚度的两倍或更多倍,更优选为变形层23a的厚度的四倍或更多倍,更优选为变形层23a的厚度的八倍或更多倍。在隔离层52的厚度是变形层23a的厚度的两倍或更多倍的情况下,能够进一步提高对剪切力的检测灵敏度。
[0201]
隔离层52的厚度优选为变形层53b的厚度的两倍或更多倍,更优选为变形层23a的厚度的四倍或更多倍,更优选为变形层53b厚度的八倍或更多。在隔离层52的厚度是变形层53b的厚度的两倍或更多倍的情况下,能够进一步提高对剪切力的检测灵敏度。
[0202]
隔离层52的厚度优选为10000μm或更小,更优选4000μm或更小。在隔离层52的厚度超过10000μm的情况下,可能难以使传感器50适用于电子装置等。
[0203]
隔离层52和变形层53b的厚度通过与在第一实施例中测量隔离层22、变形层23a和
变形层23b的厚度的方法相似的方法确定。
[0204]
隔离层52的基重优选为变形层23a的基重的10倍或更多倍,且更优选为变形层23a的基重的25倍或更多倍。在隔离层52的基重是变形层23a的基重的10倍或更多倍的情况下,能够进一步提高感测部分se21的检测灵敏度。
[0205]
隔离层52的基重优选为变形层53b的基重的10倍或更多倍,且更优选为变形层53b的基重的25倍或更多倍。在隔离层52的基重是变形层53b的基重的10倍或更多倍的情况下,能够进一步提高感测部分se52的检测灵敏度。
[0206]
隔离层52的基重优选为1000mg/cm2或更小。在隔离层52的基重超过1000mg/cm2的情况下,可能难以通过在感测表面20s的面内方向(即,传感器50的面内方向)上作用的剪切力使隔离层52在感测表面20s的面内方向上弹性变形。因此,可能降低对传感器50的面内方向上的剪切力的检测灵敏度。
[0207]
隔离层52和变形层53b的基重通过与在第一实施例中测量隔离层22、变形层23a和变形层23b的基重的方法相似的方法确定。
[0208]
(导电层)
[0209]
导电层54b具有柔性或弹性中的至少一种。在压力作用于感测表面20s的情况下,导电层54b朝向检测层51b弯曲。导电层54c可以具有或者可以不具有柔性或弹性中的至少一种;然而,为了使传感器50可安装在曲面上,优选的是导电层54c具有柔性或弹性中的至少一种。
[0210]
导电层54b具有第一表面54bs1、以及在与第一表面54bs1相反侧的第二表面54bs2。第二表面54bs2与检测层51b的第一表面21bs1相对。导电层54c具有第一表面54cs1、以及在与第一表面54cs1相反侧的第二表面54cs2。第一表面54cs1与检测层51b的第二表面21bs2相对。
[0211]
导电层54b和导电层54c是所谓的接地电极,并且连接至参考电位。导电层54b和导电层54c的形状和材料与第一实施例中的导电层24a的形状和材料相似。
[0212]
(变形层)
[0213]
变形层53b将检测层51b与导电层54b彼此隔离,以使检测层51b和导电层54b彼此平行。可以通过变形层53b的厚度来调整检测层51b的灵敏度和动态范围。变形层53b被配置为根据作用于感测表面20s上的压力,即,在传感器50的厚度方向上作用的压力,而可弹性变形。
[0214]
(粘合层)
[0215]
粘合层55将检测层51b和导电层54c接合在一起,并将检测层51b与导电层54c彼此隔离。可以通过粘合层55的厚度来调整检测层51b的灵敏度和动态范围。粘合层55例如是两个表面都设有粘合层的基底。粘合层55可以具有其中层叠多个上述基底的结构。
[0216]
[传感器的操作]
[0217]
(压力检测时的传感器的操作)
[0218]
图15是用于描述压力检测时的传感器50的操作的示例的横截面图。
[0219]
在通过物体41按压感测表面20s以使压力作用于感测表面20s的情况下,类似于根据第一实施例的传感器20的操作,导电层24a的一部分和检测层21a的一部分彼此接近,以改变多个感测部分se21的电容。
[0220]
此外,在压力通过上述挤压变形的变形层23a的一部分而作用于检测层21a的第一表面21as1的情况下,检测层21a、隔离层52以及导电层54b的每一个以压力作用点为中心朝向检测层51b弯曲,以使变形层53b的一部分挤压变形。这使得导电层54b的一部分和检测层51b的一部分彼此接近。结果,在检测层51b之中的接近导电层54b的部分中包括的多个感测部分se52的电力线的一部分(即,感测电极36与脉冲电极37之间的电力线的一部分)流向导电层54b,以改变感测部分se52的电容。
[0221]
(剪切力检测时的传感器的操作)
[0222]
图16是用于描述剪切力检测时的传感器50的操作的示例的横截面图。在剪切力作用于传感器50的情况下,隔离层52在传感器50的面内方向上弹性变形,并且传感器50的面内方向(x和y方向)上的感测部分se21和感测部分se52的相对位置发生移位。这使得检测层21a的输出信号分布(电容分布)的重心位置和检测层51b的输出信号分布(电容分布)的重心位置在传感器50的面内方向(x和y方向)上移位。
[0223]
[效果]
[0224]
根据第三实施例的传感器50包括检测层51b上方的变形层53b。这使得与包括检测层21b下方的变形层23b的根据第一实施例的传感器20相比,能够提高对压力和剪切力的检测灵敏度。
[0225]
《4第四实施例》
[0226]
[传感器的配置]
[0227]
图17是示出根据本公开第四实施例的传感器60的配置的示例的横截面图。传感器60包括检测层(第一检测层)61a、检测层(第二检测层)61b、隔离层62、变形层(第一变形层)23a、变形层(第二变形层)23b、变形层(第三变形层)63a、变形层(第四变形层)63b、导电层(第一导电层)24a、导电层(第二导电层)24b、导电层(第三导电层)64a和导电层(第四导电层)64b。应注意,在第四实施例中,与第一实施例的组件相似的组件由相同的参考符号表示,并且省略对其的描述。
[0228]
第一传感器60a包括导电层64a、变形层63a、检测层21a、变形层23a和导电层24a的层叠体。第二传感器60b包括导电层24b、变形层23b、检测层61b、变形层63b和导电层64b的层叠体。
[0229]
在传感器60的各层之间提供未图示的粘合层,以将各层接合在一起。然而,在两个相邻层中的至少一个具有粘合性的情况下,可以不提供粘合层。
[0230]
检测层61a具有第一表面61as1、以及在与第一表面61as1相反侧的第二表面61as2。检测层61b具有与第二表面61as2相对的第一表面61bs1,以及在与第一表面61bs1相反侧的第二表面61bs2。检测层61a和检测层61b彼此平行地布置。隔离层62设置在检测层61a与检测层21b之间。即,隔离层62设置在第一传感器60a与第二传感器60b之间。
[0231]
导电层24a设置为与检测层61a的第一表面61as1相对。导电层24a平行于检测层61a布置。导电层24b被设置为与检测层61b的第二表面21bs2相对。导电层24b平行于检测层61b布置。导电层64a设置在检测层61a与隔离层62之间。导电层64a平行于检测层61a布置。导电层64b设置在检测层61b与隔离层62之间。导电层64b平行于检测层61b布置。变形层23a设置在检测层61a与导电层24a之间。变形层23b设置在检测层61b与导电层24b之间。变形层63a设置在检测层61a与导电层64a之间。变形层63b设置在检测层61b与导电层64b之间。
[0232]
(检测层)
[0233]
检测层61a和检测层61b是互电容型的检测层。检测层61a具有柔性。在压力作用于感测表面20s的情况下,检测层61a朝向导电层64a弯曲。检测层61a包括多个感测部分(第一感测部分)se61。感测部分se61检测作用于感测表面20s上的压力,并将检测结果输出到ic 13a。具体地,感测部分se61检测与感测部分se61和导电层24a之间的距离以及感测部分se21和导电层64a之间的距离相对应的电容,并将检测结果输出到ic 13a。
[0234]
检测层61b具有柔性。在压力作用于感测表面20s的情况下,检测层61b朝向导电层24b弯曲。检测层61b包括多个感测部分(第二感测部分)se62。感测部分se62检测作用于感测表面20s上的压力,并将检测结果输出到ic 13b。具体地,感测部分se62检测与感测部分se62和导电层64b之间的距离以及感测部分se62和导电层24b之间的距离相对应的电容,并将检测结果输出到ic 13b。
[0235]
检测层61a和检测层61b具有与第一实施例中的检测层21a的配置相似的配置。
[0236]
(隔离层)
[0237]
隔离层62将导电层64a与导电层64b彼此隔离。即,隔离层62将第一传感器60a与第二传感器60b彼此隔离。隔离层62被配置为通过在感测表面20s的面内方向(即,传感器20的面内方向)上作用的剪切力而在感测表面20s的面内方向上可弹性变形。
[0238]
隔离层62的材料与第一实施例中的隔离层22的材料相似。
[0239]
隔离层62的25%cld值是变形层23a的25%cld值的10倍或更多倍,优选为变形层23a的25%cld值的30倍或更多倍,更优选为变形层23a的25%cld值的50倍或更多倍。在隔离层62的25%cld值是变形层23a的25%cld值的10倍或更多倍的情况下,可以提高感测部分se61的检测灵敏度。
[0240]
隔离层62的25%cld值是变形层63a的25%cld值的10倍或更多倍,优选为变形层63a的25%cld值的30倍或更多倍,更优选为变形层63a的25%cld值的50倍或更多倍。在隔离层62的25%cld值是变形层63a的25%cld值的10倍或更多倍的情况下,可以提高感测部分se61的检测灵敏度。
[0241]
隔离层62的25%cld值是变形层23b的25%cld值的10倍或更多倍,优选为变形层23b的25%cld值的30倍或更多倍,更优选为变形层23b的25%cld值的50倍或更多倍。在隔离层62的25%cld值是变形层23b的25%cld值的10倍或更多倍的情况下,可以提高感测部分se62的检测灵敏度。
[0242]
隔离层62的25%cld值是变形层63b的25%cld值的10倍或更多倍,优选为变形层63b的25%cld值的30倍或更多倍,更优选为变形层63b的25%cld值的50倍或更多倍。在隔离层62的25%cld值是变形层63b的25%cld值的10倍或更多倍的情况下,可以提高感测部分se62的检测灵敏度。
[0243]
隔离层62的25%cld值优选为500kpa或更小。在隔离层62的25%cld值超过500kpa的情况下,可能难以通过在感测表面20s的面内方向(即,传感器60的面内方向)上作用的剪切力使隔离层62在感测表面20s的面内方向上弹性变形。因此,可能降低对传感器60的面内方向上的剪切力的检测灵敏度。
[0244]
隔离层62、变形层63a和变形层63b的25%cld值根据jis k 6254测量。
[0245]
隔离层62的厚度优选为变形层23a的厚度的两倍或更多倍,更优选为变形层23a的
厚度的四倍或更多倍,更优选为变形层23a的厚度的八倍或更多倍。在隔离层22的厚度是变形层23a的厚度的两倍或更多倍的情况下,能够进一步提高对剪切力的检测灵敏度。
[0246]
隔离层62的厚度优选为变形层63a厚度的两倍或更多倍,更优选为变形层63a厚度的四倍或更多倍,更优选为变形层63a厚度的八倍或更多倍。在隔离层62的厚度是变形层63a的厚度的两倍或更多倍的情况下,能够进一步提高对剪切力的检测灵敏度。
[0247]
隔离层62的厚度优选为变形层23b的厚度的两倍或更多倍,更优选为变形层23b的厚度的四倍或更多倍,更优选为变形层23b的厚度的八倍或更多倍。在隔离层62的厚度是变形层23b的厚度的两倍或更多倍的情况下,能够进一步提高对剪切力的检测灵敏度。
[0248]
隔离层62的厚度优选为变形层63b厚度的两倍或更多倍,更优选为变形层63b厚度的四倍或更多倍,更优选为变形层63b厚度的八倍或更多倍。在隔离层62的厚度是变形层63b的厚度的两倍或更多倍的情况下,能够进一步提高对剪切力的检测灵敏度。
[0249]
隔离层62的厚度优选为10000μm或更小,更优选为4000μm或更小。在隔离层62的厚度超过10000μm的情况下,可能难以使传感器60适用于电子装置等。
[0250]
隔离层62、变形层63a和变形层63b的厚度通过与在第一实施例中测量隔离层22、变形层23a和变形层23b的厚度的方法相似的方法确定。
[0251]
隔离层62的基重优选为变形层23a的基重的10倍或更多倍,且更优选为变形层23a的基重的25倍或更多倍。在隔离层62的基重是变形层23a的基重的10倍或更多倍的情况下,能够进一步提高感测部分se61的检测灵敏度。
[0252]
隔离层62的基重优选为变形层63a的基重的10倍或更多倍,且更优选为变形层63a的基重的25倍或更多倍。在隔离层62的基重是变形层63a的基重的10倍或更多倍的情况下,能够进一步提高感测部分se61的检测灵敏度。
[0253]
隔离层62的基重优选为变形层23b的基重的10倍或更多倍,且更优选为变形层23b的基重的25倍或更多倍。在隔离层62的基重是变形层23b的基重的10倍或更多倍的情况下,能够进一步提高感测部分se62的检测灵敏度。
[0254]
隔离层62的基重优选为变形层63b的基重的10倍或更多倍,且更优选为变形层63b的基重的25倍或更多倍。在隔离层62的基重是变形层63b的基重的10倍或更多倍的情况下,能够进一步提高感测部分se62的检测灵敏度。
[0255]
隔离层62的基重优选为1000mg/cm2或更小。在隔离层62的基重超过1000mg/cm2的情况下,可能难以通过在感测表面20s的面内方向(即,传感器60的面内方向)上作用的剪切力使隔离层62在感测表面20s的面内方向上弹性变形。因此,可能降低对传感器60的面内方向上的剪切力的检测灵敏度。
[0256]
隔离层62、变形层63a和变形层63b的基重通过与在第一实施例中测量隔离层22、变形层23a和变形层23b的基重的方法相似的方法确定。
[0257]
(导电层)
[0258]
导电层64a具有柔性或弹性中的至少一种。在压力作用于感测表面20s的情况下,导电层64a朝向检测层61b弯曲。导电层64b具有柔性或弹性中的至少一种。在压力作用于感测表面20s的情况下,导电层64b朝向检测层61b弯曲。
[0259]
导电层64a具有第一表面64as1、以及在与第一表面64as1相反侧的第二表面64as2。第一表面64as1与检测层61a的第二表面61as2相对。导电层64b具有第一表面64bs1、
以及在与第一表面64bs1相反侧的第二表面64bs2。第二表面64bs2与检测层61b的第一表面61bs1相对。
[0260]
导电层64a和导电层64b是所谓的接地电极,并且连接至参考电位。导电层64a和导电层64b的形状和材料与第一实施例中的导电层24a的形状和材料相似。
[0261]
(变形层)
[0262]
变形层63a将检测层61a与导电层62a彼此隔离,以使检测层61a和导电层64a彼此平行。可以通过变形层63a的厚度来调整检测层61a的灵敏度和动态范围。变形层63a被配置为根据作用于感测表面20s上的压力,即,在传感器60的厚度方向上作用的压力,而可弹性变形。
[0263]
变形层63b将检测层61b与导电层64b彼此隔离,以使检测层61b和导电层64b彼此平行。可以通过变形层63b的厚度来调整检测层61b的灵敏度和动态范围。变形层63b被配置为根据作用于感测表面20s上的压力,即,在传感器60的厚度方向上作用的压力,而可弹性变形。
[0264]
变形层63a和变形层63b的材料与第一实施例中的变形层23a的材料相似。
[0265]
[传感器的操作]
[0266]
(压力检测时的传感器的操作)
[0267]
图18是用于描述压力检测时的传感器60的操作的示例的横截面图。在通过物体41按压感测表面20s以使压力作用于感测表面20s的情况下,类似于第一实施例中的传感器20的操作,导电层24a的一部分和检测层61a的一部分彼此接近。此外,在压力通过由导电层24a挤压变形的变形层23a的一部分而作用于检测层61a的第一表面61as1的情况下,检测层61a以压力作用点为中心朝向导电层64a弯曲,以使变形层63a的一部分挤压变形。这使得检测层61a的一部分和导电层64a的一部分彼此接近。
[0268]
如上所述,导电层24a的一部分和检测层61a的一部分彼此接近,并且检测层61a的一部分和导电层64a的一部分彼此接近,这导致在检测层61a之中的接近导电层24a和导电层64a的部分中包括的多个感测部分se61的电力线的一部分(即,感测电极36与脉冲电极37之间的电力线的一部分)流向导电层24a和导电层64a,从而改变多个感测部分se61的电容。
[0269]
在压力通过如上所述挤压变形的变形层63a的一部分而作用于导电层64a的第一表面的情况下,导电层64a、隔离层62和导电层64b的每一个以压力作用点为中心朝向检测层61b弯曲,以使变形层63b的一部分挤压变形。这使得导电层64b的一部分和检测层61b的一部分彼此接近。此外,在压力通过如上上述挤压变形的变形层63b的一部分而作用于检测层61b的第一表面61bs1的情况下,检测层61b以压力作用点为中心朝向导电层24b弯曲,以使变形层23b的一部分挤压变形。这使得检测层61b的一部分和导电层24b的一部分彼此接近。
[0270]
如上所述,导电层64b的一部分和检测层61b的一部分彼此接近,并且检测层61b的一部分和导电层24b的一部分彼此接近,这使得在检测层61b之中的接近导电层64b和导电层24b的部分中包括的多个感测部分se62的电力线的一部分(即,感测电极36与脉冲电极37之间的电力线的一部分)流向导电层64b和导电层24b,从而改变多个感测部分se62的电容。
[0271]
(剪切力检测时的传感器的操作)
[0272]
图19是用于描述剪切力检测时的传感器60的操作的示例的横截面图。在剪切力作
用于传感器60的情况下,隔离层62在传感器60的面内方向上弹性变形,并且感测部分se61和感测部分se62在传感器60的面内方向(x和y方向)上的相对位置发生移位。这使得检测层61a的输出信号分布(电容分布)的重心位置和检测层61b的输出信号分布(电容分布)的重心位置在传感器60的面内方向(x和y方向)上移位。
[0273]
[效果]
[0274]
在根据第四实施例的传感器60中,导电层24a和导电层64a分别设置在检测层61a的第一表面61as1侧和检测层61a的第二表面61as2侧。此外,导电层24b和导电层64b分别设置在检测层61b的第一表面61bs1侧和检测层61b的第二表面61bs2侧。这使得能够使感测部分se61和感测部分se62的检测灵敏度高于第一实施例中的感测部分se21和感测部分se22的检测灵敏度。因此,与根据第一实施例的传感器20相比,传感器60获得更高的检测灵敏度。
[0275]
此外,根据第四实施例的传感器60可以通过在具有相同配置的第一传感器60a与第二传感器60b之间插入隔离层62来配置。这使得类似于根据第一实施例的传感器20,能够整体以相对简单和节省空间的配置来检测三轴力分布。
[0276]
《5第五实施例》
[0277]
[传感器的配置]
[0278]
图20是示出根据本公开第五实施例的传感器70的配置的示例的横截面图。传感器70包括检测层71、隔离层72、变形层73、导电层74a和导电层74b。
[0279]
检测层71具有第一表面71s1、以及在与第一表面71s1相反侧的第二表面71s2。导电层74a被设置为与检测层71的第一表面71s1相对。导电层74a平行于检测层71布置。导电层74b被设置为与检测层71的第二表面71s2相对。导电层74b平行于检测层71布置。隔离层72设置在检测层71与导电层74a之间。变形层73设置在检测层71与导电层74b之间。
[0280]
(检测层)
[0281]
检测层71是互电容型的检测层。检测层71具有柔性。在压力作用于感测表面20s的情况下,检测层71朝向导电层74b弯曲。检测层71包括多个感测部分se71。感测部分se71检测作用于感测表面20s上的压力,并将检测结果输出到ic 13a。具体地,感测部分se71检测与感测部分se71和导电层74b之间的距离相对应的电容,并将检测结果输出到ic 13a。应当注意,在第五实施例中,也可以不包括图1所示的ic 13b。
[0282]
检测层71具有与第一实施例中的检测层21a相似的配置。
[0283]
(隔离层)
[0284]
隔离层72将检测层71与导电层74a彼此隔离,以使检测层71和导电层74a彼此平行。隔离层72被配置为通过在感测表面20s的面内方向(即,传感器20的面内方向)上作用的剪切力而在感测表面20s的面内方向上可弹性变形。
[0285]
隔离层72的材料与第一实施例中的隔离层22的材料相似。
[0286]
隔离层72的25%cld值是变形层73的25%cld值的10倍或更多倍,优选为变形层73的25%cld值的30倍或更多倍,更优选为变形层73的25%cld值的50倍或更多倍。在隔离层72的25%cld值是变形层73的25%cld值的10倍或更多倍的情况下,能够提高传感器70对压力和剪切力的检测灵敏度。
[0287]
隔离层72的25%cld值优选为500kpa或更小。在隔离层72的25%cld值超过500kpa
的情况下,可能难以通过在感测表面20s的面内方向(即,传感器70的面内方向)上作用的剪切力使隔离层72在感测表面20s的面内方向上弹性变形。因此,可能降低对传感器70的面内方向上的剪切力的检测灵敏度。
[0288]
隔离层72和变形层73的25%cld值根据jis k 6254测量。
[0289]
隔离层72的厚度优选为变形层73的厚度的两倍或更多倍,更优选为变形层73的厚度的四倍或更多倍,并且更优选为变形层23a的厚度的八倍或更多倍。在隔离层72的厚度是变形层73的厚度的两倍或更多倍的情况下,能够进一步提高传感器70对剪切力的检测灵敏度。
[0290]
隔离层72的厚度优选为10000μm或更小,更优选为4000μm或更小。在隔离层72的厚度超过10000μm的情况下,可能难以使传感器70适用于电子装置等。
[0291]
隔离层72和变形层73的厚度通过与第一实施例中测量隔离层22、变形层23a和变形层23b的厚度的方法相似的方法确定。
[0292]
隔离层72的基重优选为变形层73的基重的10倍或更多倍,且更优选为变形层73的基重的25倍或更多倍。在隔离层72的基重是变形层73的基重的10倍或更多倍的情况下,能够进一步提高传感器70对压力和剪切力的检测灵敏度。
[0293]
隔离层72的基重优选为1000mg/cm2或更小。在隔离层72的基重超过1000mg/cm2的情况下,可能难以通过在感测表面20s的面内方向(即,传感器70的面内方向)上作用的剪切力使隔离层72在感测表面20s的面内方向上弹性变形。因此,可能降低对传感器70的面内方向上的剪切力的检测灵敏度。
[0294]
隔离层72和变形层73的基重通过与第一实施例中测量隔离层22、变形层23a和变形层23b的基重的方法相似的方法确定。
[0295]
(导电层)
[0296]
导电层74a具有柔性或弹性中的至少一种。在压力作用于感测表面20s的情况下,导电层74a朝向检测层71弯曲。导电层74b可以具有或者可以不具有柔性或弹性中的至少一种;然而,为了使传感器70可安装在曲面上,优选的是导电层74b具有柔性或弹性中的至少一种。
[0297]
导电层74a具有第一表面74as1、以及在与第一表面74as1相反侧的第二表面74as2。第二表面74as2与检测层71的第一表面71s1相对。导电层74b具有第一表面74bs1、以及在与第一表面74bs1相反侧的第二表面74bs2。第一表面74bs1与检测层71的第二表面71s2相对。
[0298]
导电层74a和导电层74b是所谓的接地电极,并且连接至参考电位。导电层74a和导电层74b的形状和材料与第一实施例中的导电层24a的形状和材料相似。
[0299]
(变形层)
[0300]
变形层73将检测层71与导电层74b彼此隔离,以使检测层71和导电层74b彼此平行。可以通过变形层73的厚度来调整检测层71的灵敏度和动态范围。
[0301]
变形层73被配置为根据作用于感测表面20s上的压力,即,在传感器70的厚度方向上作用的压力,而可弹性变形。变形层73的材料与第一实施例中的变形层23a的材料相似。
[0302]
[传感器的操作]
[0303]
(压力检测时的传感器的操作)
[0304]
在通过物体41按压感测表面20s以使压力作用于感测表面20s的情况下,导电层74a、隔离层72以及检测层71的每一个以压力作用点为中心朝向导电层74b弯曲,以使变形层73的一部分挤压变形。这使得检测层71的一部分和导电层74b的一部分彼此接近。结果,在检测层71之中的接近导电层74a的部分中包括的多个感测部分se71的电力线的一部分(即,感测电极36与脉冲电极37之间的电力线的一部分)流向导电层74a,以改变感测部分se71的电容。
[0305]
(剪切力检测时的传感器的操作)
[0306]
在剪切力作用于传感器70的情况下,隔离层72在传感器70的面内方向上弹性变形,并且感测表面20s的压力作用位置在传感器70的面内方向上移位。cpu 12a基于时间序列检测传感器70的面内方向上的信号分布的变化,这使得能够检测剪切力。
[0307]
[效果]
[0308]
在根据第五实施例的传感器50中,可以使用比根据第一实施例的传感器20更简单的配置来检测三轴力。
[0309]
《6第六实施例》
[0310]
[传感器的配置]
[0311]
图28是示出根据本公开第六实施例的传感器120的配置的示例的横截面图。传感器120与根据第五实施例的传感器70的不同之处在于包括变形层121,以代替隔离层72(参见图20)。传感器120可包括导电层74a的第一表面74as1上方的外部材料122。应当注意,在第六实施例中,与第五实施例的组件相似的组件由相同的参考符号表示,并且省略对其的描述。
[0312]
变形层121具有与第一实施例中的变形层23a相似的功能和配置。外部材料122具有柔性。在压力作用于外部材料122的前表面的情况下,外部材料122朝向检测层71弯曲。外部材料122包括例如从包括聚合树脂层、金属层和金属氧化物层的组中选择的至少一种。
[0313]
[传感器的操作]
[0314]
(压力检测时的传感器的操作)
[0315]
在通过物体41按压外部材料122的前表面以使压力作用于感测表面20s的情况下,导电层74a以压力作用点为中心朝向检测层71弯曲,以使变形层121的一部分挤压变形。这使得导电层74a的一部分和检测层71的一部分彼此接近。结果,在检测层71之中的接近导电层74的部分中包括的多个感测部分se71的电力线的一部分流向导电层74a,以改变感测部分se71的电容。
[0316]
此外,压力通过上文所述挤压变形的变形层121的一部分而作用于检测层71的第一表面71s1,并且检测层71以压力作用点为中心朝向导电层74b弯曲。这使得检测层71的一部分和导电层74b的一部分彼此接近。结果,在检测层71之中的接近导电层74b的部分中包括的多个感测部分se71的电力线的一部分流向导电层74b,以改变多个感测部分se71的电容。
[0317]
ic 13a顺序地扫描在检测层71中包括的多个感测部分se71,以获取来自多个感测部分se21的输出信号分布,即电容分布。ic 13a将获取的输出信号分布输出到主机设备12的cpu 12a。cpu 12a基于从ic 13a接收的输出信号分布,计算压力大小和压力作用位置。
[0318]
在传感器模块11包括上述传感器120的情况下,传感器模块11可以不包括ic 13b
(参见图1)。
[0319]
《6修改示例》
[0320]
(修改示例1)
[0321]
在第二实施例中,如图21所示,隔离层25a和隔离层25b中的每一个可被划分为在感测表面20s的面内方向上具有相同图案的多个部分,隔离层25a的所划分部分和隔离层25b的所划分部分可以在传感器20a的厚度方向上彼此重叠。这使得能够在感测表面20s内的多个位置处检测三轴力。
[0322]
类似地,在第一实施例中,隔离层22可在感测表面20s的面内方向上划分为多个部分。在第三实施例中,隔离层52可在感测表面20s的面内方向上划分为多个部分。在第四实施例中,隔离层62可在感测表面20s的面内方向上划分为多个部分。在第五实施例中,隔离层72可在感测表面20s的面内方向上划分为多个部分。即使在这些情形中,也能够在感测表面20s内的多个位置处检测三轴力。
[0323]
(修改示例2)
[0324]
在第二实施例中,已经描述了其中检测层21a中包括的多个感测部分se21的布置间距p1和检测层21b中包括的多个感测部分se22的布置间距p2彼此相同的情况;然而,如图22所示,多个感测部分se22的布置间距p1和多个感测部分se21的布置间距p2可以彼此不同。
[0325]
在这种情形中,多个感测部分se22的布置间距p2可以大于多个感测部分se21的布置间距p1,并且感测部分se22的面积可以大于感测部分se21的面积。在压力作用于感测表面20s的情况下,压力经由诸如变形层23a、隔离层25等多个层作用于下侧的检测层21b;因此,下侧的检测层21b的变形范围趋向于比上侧的检测层21a的变形范围更宽。因此,如上所述,多个感测部分se22的布置间距p2大于多个感测部分se21的布置间距p1,并且感测部分se22的面积大于感测部分se21的面积,这使得能够提高检测层21b的灵敏度。这里,感测部分se21的面积是指在从z轴方向(检测层21a的厚度方向)观看感测部分se21的平面图中的感测部分se21的面积。此外,感测部分se22的面积是指在从z轴方向(检测层21b的厚度方向)观看感测部分se22的平面图中的感测部分se22的面积。
[0326]
类似地,在第一实施例中,多个感测部分se22的布置间距p2可以大于多个感测部分se21的布置间距p1,并且感测部分se22的面积可以大于感测部分se21的面积。在第三实施例中,多个感测部分se52的布置间距p2可以大于多个感测部分se21的布置间距p1,并且感测部分se52的面积可以大于感测部分se21的面积。在第四实施例中,多个感测部分se62的布置间距p2可以大于多个感测部分se61的布置间距p1,并且感测部分se62的面积可以大于感测部分se61的面积。
[0327]
(修改示例3)
[0328]
在第一和第二实施例中,变形层23a的25%cld值可以小于变形层23b的25%cld值。因此,当压力作用于感测表面20s上时,变形层23a在低压力范围(例如,等于或高于1g且等于或低于100g)内被挤压变形,并且变形层23b在高压力范围(例如,高于100g且等于或低于500g)内被挤压变形。高压力范围(第二压力范围)设置为高于低压力范围(第一压力范围)的范围。
[0329]
在采用上述配置的情况下,检测层21a可用于低压力范围(例如,等于或高于1g且
等于或低于100g)内的压力检测,检测层21b可用于高压力范围(例如,高于100g且等于或低于500g)内的压力检测。
[0330]
在第三实施例中,变形层23a的25%cld值可以小于变形层53b的25%cld值。因此,当压力作用于感测表面20s上时,变形层23a在低压力范围(例如,等于或高于1g且等于或低于100g)内被挤压变形,并且变形层53b在高压力范围(例如,高于100g且等于或低于500g)内被挤压变形。高压力范围(第二压力范围)设置为高于低压力范围(第一压力范围)的范围。
[0331]
在采用上述配置的情况下,检测层21a可用于低压力范围(例如,等于或高于1g且等于或低于100g)内的压力检测,检测层51b可用于高压力范围(例如,高于100g且等于或低于500g)内的压力检测。
[0332]
在第四实施例中,变形层23a的25%cld值可以小于变形层63b和变形层23b的25%cld值中的每一个。此外,变形层63a的25%cld值可以小于变形层63b和变形层23b的25%cld值中的每一个。因此,当压力作用于感测表面20s上时,变形层23a和变形层63a在低压力范围(例如,等于或高于1g且等于或低于100g)内被挤压变形,并且变形层63b和变形层23b在高压力范围(例如,高于100g且等于或低于500g)内被挤压变形。高压力范围(第二压力范围)设置为高于低压力范围(第一压力范围)的范围。
[0333]
在采用上述配置的情况下,检测层61a可用于低压力范围(例如,等于或高于1g且等于或低于100g)内的压力检测,检测层61b可用于高压力范围(例如,高于100g且等于或低于500g)内的压力检测。
[0334]
(修改示例4)
[0335]
在第一实施例中,如图23所示,传感器20可进一步包括设置在电极层24侧的前表面(感测表面20s)上的前表面层81。前表面层81是其前表面具有高摩擦系数的高摩擦层。以这种方式,通过传感器20进一步包括前表面层81,能够防止物体在传感器20的感测表面20s上滑动。这使得能够提高传感器20对剪切力的检测精度。
[0336]
前表面层81可在前表面上具有凹凸形状,以实现具有高摩擦系数的前表面,前表面层81可包括橡胶基树脂(例如,硅橡胶),以实现具有高摩擦系数的前表面,或者,前表面层81可以在前表面上具有凹凸形状,并且包括橡胶基树脂,以实现具有高摩擦系数的前表面。从防止物体在传感器20的感测表面20s上滑动的角度来讲,前表面层81的前表面的静摩擦系数优选为1或更大。此处,静摩擦系数是使用依梦达公司(imada co.,ltd.)制造的摩擦系数测量夹具,根据jis k 7125:1999测量的。前表面层81可以是电子装置等的外部材料。
[0337]
即使在第二至第五实施例中,传感器20a、50、60和70也可以以相似方式进一步包括设置在导电层24a或74a侧的前表面(感测表面20s)上的前表面层81。
[0338]
(修改示例5)
[0339]
在第一至第四实施例中,两个检测层的尺寸可以彼此不同。例如,在第一和第二实施例中,检测层21a的外边缘可以位于检测层21b的外边缘的内侧。在这种情况下,即使在物体撞击传感器20或20a的边缘部分的情况下,也可以稳定地执行检测。类似地,在第三实施例中,检测层21a的外边缘可以位于检测层51b的外边缘的内侧,并且在第四实施例中,检测层61a的外边缘可以位于检测层61b的外边缘的内侧。即使在这种情况下,也可以实现与上述效果相似的效果。
[0340]
图24示出传感器20a的配置的示例,其中在第二实施例中,检测层21a的外边缘位于检测层21b的外边缘的内侧。检测层21a、变形层23a、导电层24a和隔离层25a可以被包括在第一层叠体82a中,并且检测层21b、变形层23b、导电层24b、导电层24和隔离层25b可以被包括在第二层叠体82b中。第一层叠体82a的外边缘可位于第二层叠体82b的外边缘的内侧。
[0341]
(修改示例6)
[0342]
在第二实施例中,如图25所示,传感器20可进一步包括设置在导电层24a侧的前表面(感测表面20s)上的覆盖层83。覆盖层83包括多个构造体83a,以及保护层83b。多个构造体83a中的每一个被设置以针对多个感测部分se21中的对应一个。也就是说,多个构造体83a中的每一个被设置为在传感器20a的厚度方向上重叠在多个感测部分se21中的对应一个和多个感测部分se22中的对应一个上。构造体83a各自用作按压感测表面20s的按压件。保护层83b覆盖多个构造体83a。保护层83b保护多个构造体83a,并防止多个构造体83a的剥离等。
[0343]
构造体83a的弹性模量大于保护层83b的弹性模量。构造体83a的弹性模量超过例如100mpa。保护层83b的弹性模量例如为100mpa或更小。上述弹性模量根据jis k 7161测量。
[0344]
构造体83a各自用作按压感测表面20s的按压件;因此,压力集中在感测表面20s之中与感测部分se21和se22对应的部分上。这使得能够提高传感器20a的灵敏度。
[0345]
即使在第一以及第三至第五实施例中,传感器20、50、60和70也可以以相似方式进一步包括设置在导电层24a或74a侧的前表面(感测表面20s)上的覆盖层83。
[0346]
(修改示例7)
[0347]
在第一至第四实施例中,描述了传感器20、20a、50和60的每一个包括两个检测层的情况;然而,传感器20、20a、50和60的每一个可包括三个或更多检测层。
[0348]
图26是示出包括检测层21a、检测层21b和检测层21c的传感器20b的配置的示例的横截面图。传感器20b与根据第一实施例的传感器20的不同之处在于,进一步包括检测层21c、隔离层22a、变形层23c和导电层24c。应当注意,在修改示例7中,与第一实施例的组件相似的组件由相同的参考符号表示,并且省略对其的描述。
[0349]
检测层21c具有与检测层21b的第二表面21bs2相对的第一表面21cs1、以及在与第一表面21cs1相反侧的第二表面21cs2。隔离层22a设置在导电层24b与检测层21c之间。导电层24c被设置为与检测层21c的第二表面21cs2相对。导电层24c平行于检测层21c布置。变形层23c设置在检测层21c与导电层24c之间。
[0350]
检测层21c是互电容型的检测层。检测层21c具有柔性。在压力作用于感测表面20s的情况下,检测层21c朝向导电层24c弯曲。检测层21c包括多个感测部分(第三感测部分)se23。感测部分se23检测作用于感测表面20s上的压力,并将检测结果输出到ic(未示出)。具体地,感测部分se23检测与感测部分se23和导电层24c之间的距离相对应的电容,并将检测结果输出到ic。
[0351]
检测层21c具有与第一实施例中的检测层21a的配置相似的配置。
[0352]
隔离层22a将导电层24b与检测层21c彼此隔离。
[0353]
隔离层22a被配置为通过在感测表面20s的面内方向(即,传感器20b的面内方向)上作用的剪切力,在感测表面20s的面内方向上弹性变形。
[0354]
隔离层72的材料与第一实施例中的隔离层22的材料相似。
[0355]
导电层24c可以具有或者可以不具有柔性或弹性中的至少一种;然而,为了使传感器20b可安装在曲面上,优选的是导电层24c具有柔性或弹性中的至少一种。
[0356]
导电层24c是所谓的接地电极,并与参考电位连接。导电层24c的形状和材料可以与第一实施例中的导电层24a的形状和材料相似。
[0357]
变形层23c将检测层21c与导电层24c彼此隔离,以使检测层21c和导电层24ca彼此平行。变形层23c被配置为根据作用于感测表面20s上的压力,即,在传感器20b的厚度方向上作用的压力,而可弹性变形。
[0358]
变形层23c的材料与第一实施例中的变形层23a的材料相似。
[0359]
(修改示例8)
[0360]
在第一至第五实施例中,描述了感测电极36和脉冲电极37的每一个具有梳状的情况;然而,感测电极36和脉冲电极37的形状不限于此形状。感测电极36和脉冲电极37可以具有例如平板形状、网格形状、同心形状、螺旋形状、放射形状、或条纹形状等。
[0361]
(修改示例9)
[0362]
在第一至第五实施例中,描述了在基底31的第一表面31s1上设置感测电极36和脉冲电极37的情况;然而,感测电极36和脉冲电极37可以设置在基底31的不同表面上。例如,感测电极36可以设置在基底31的第一表面31s1上,脉冲电极37可以设置在基底31的第二表面31s2上,并且感测电极36和脉冲电极37可以彼此相对,基底31插入两者之间。
[0363]
(修改示例10)
[0364]
在第一至第五实施例中,描述了检测层21a、21b、51b、61a、61b和71是互电容型的检测层的情况;然而,检测层21a、21b、51b、61a、61b和71可以是自电容型的检测层。在这种情况下,检测层21a、21b、51b、61a、61b和71的每一个包括基底、以及设置在该基底上的薄膜状电极层。
[0365]
(修改示例11)
[0366]
在第一实施例中,描述了其中传感器20是能够检测三轴力分布的电容型传感器的示例;然而,除了上述三轴力分布之外,还可以检测传感器20在空间内的位置。具体地,例如,传感器20可以进一步包括位置检测器,其检测传感器20在三维空间内的位置。位置检测器优选设置在检测三轴力分布的检测层21a以外的位置。
[0367]
图29是示出具有位置检测器91的柔性印刷电路板的配置的示例的平面图。图30是沿图29的线xxx-xxx获取的横截面图。柔性印刷电路板包括检测层21a、连接部分21a1和位置检测器91。
[0368]
位置检测器91包括突出部分91a和位置传感器91b。突出部分91a是用于支撑位置传感器91b的支撑体。突出部分91a从连接部分21a1突出。突出部分91a具有与连接部分21a1相似的膜形状。用于实现位置传感器91b的电极(未示出)设置在突出部分91a的一个主表面上。
[0369]
位置传感器91b检测传感器20的位置,并将获取的结果输出到主机设备12的cpu 12a(参见图1)。这使得能够从传感器20接收电容分布以及传感器20的位置信息。因此,在传感器20设置在机器人的末端执行器中的情况下,cpu 12a能够基于从传感器20接收到的电容分布和位置信息,检测末端执行器在三维空间内的位置以及在该位置处作用于末端执行
器上的压力等。
[0370]
位置传感器91b设置在突出部分91a的一个主表面上。例如,位置传感器91b在以下电极上实施:所述电极经由焊料91c设置在突出部分91a的一个主表面上。图30示出了其中焊料91c是焊球的示例。上述电极和多个连接端子21a2通过布线(未示出)彼此连接。
[0371]
即使在第二至第六实施例中,传感器20a、50、60、70和120的每一个也可类似地包括位置检测器91。
[0372]
(修改示例12)
[0373]
如图31和图32所示,在第一实施例中,传感器20的主表面(感测表面20s)和侧表面可被覆盖层101覆盖。在这种情况下,设有传感器20的壳体102的前表面可以与传感器20一起被覆盖层101覆盖。如图33所示,第一实施例中的传感器20的侧表面可以被覆盖层101覆盖。可通过传感器20和覆盖层101构成防水传感器。
[0374]
覆盖层101用于保护传感器20不受水等的影响。在覆盖层101覆盖传感器20的主表面的情况下,覆盖层101优选地与传感器20的主表面紧密接触。这使得能够抑制由覆盖层101覆盖的传感器20中产生不灵敏区域。此外,可以抑制由覆盖层101覆盖的传感器20的检测精度的降低。覆盖层101和传感器20的主表面可以通过粘合层(未示出)粘合在一起。类似地,覆盖层101和传感器20的侧表面可以通过粘合层(未示出)粘合在一起。
[0375]
例如,覆盖层101是具有自支承能力的塑料膜,或者是不具有自支承能力、且涂布于传感器20的侧表面上或涂布于传感器20的主表面及侧表面上的涂膜。覆盖层101可以是塑料膜和涂膜的层叠体。在这种情况下,最好将涂膜设置在塑料膜的内侧。
[0376]
塑料膜优选具有弹性,以便根据传感器20的形状变化而可变形。塑料膜从弹性的角度来讲,优选包括弹性体。弹性体可以是泡沫体。弹性体包括例如合成橡胶。合成橡胶包括例如从包括硅橡胶、聚氨酯橡胶和丙烯酸橡胶的组中选择的至少一种。涂膜包括从包括凝胶、油脂和粘合剂的组中选择的至少一种。凝胶包括例如从包括硅凝胶和聚氨酯凝胶的组中选择的至少一种。润滑油包括例如从包括硅基润滑油、氟基润滑油(例如,使用ptfe作为增稠剂的ptfe润滑油)和烃基润滑油(例如,阿佩佐(apiezon)润滑油)的组中选择的至少一种。如上所述,在本说明书中,压敏粘合剂被定义为粘合剂的一种。
[0377]
如上所述,传感器20的侧表面由覆盖层101覆盖,这使得可以抑制水等从变形层23a和23b的侧表面渗浸到变形层23a和23b内。这使得可以防止由于水等的渗浸导致变形层23a和23b变得不易变形。因此,可以抑制由于水等引起的传感器20的功能劣化。
[0378]
在变形层23a和23b包含泡沫树脂的情况下,如果水等进入泡沫树脂,变形层23a和23b对于感测表面20s的按压会变得不易变形。这可能会使传感器20的特性显著劣化。因此,在变形层23a和23b包含泡沫树脂的情况下,由覆盖层101保护传感器20特别有效。
[0379]
即使在第二至第六实施例中的传感器20a、50、60、70和120中,类似地,传感器20a、50、60、70和120的主表面和侧表面可以由覆盖层101覆盖,或者传感器20a、50、60、70和120的侧表面可以由覆盖层101覆盖。
[0380]
(修改示例13)
[0381]
如图34和图35所示,第一实施例中的传感器20可包括密封部分111a和密封部分111b。密封部分111a保护变形层23a不受水等的影响。密封部分111b保护变形层23b不受水等的影响。
[0382]
密封部分111a设置在检测层21a的第一表面21as1的外边缘部分与导电层24a的第二表面24as2的外边缘部分之间。密封部分111a具有包围变形层23a的侧表面的闭环形状。密封部分111a可以与变形层23a的侧表面紧密接触。
[0383]
密封部分111b设置在检测层21b的第二表面21as2的外边缘部分与导电层24b的第一表面24bs1的外边缘部分之间。密封部分111b具有包围变形层23b的侧表面的闭环形状。密封部分111b可以与变形层23b的侧表面紧密接触。
[0384]
密封部分111a和111b例如是具有自支承能力的塑料膜,或者是不具有自支承能力、且涂布于变形层23a和23b的侧表面上的涂膜。密封部分111a和111b中的每一个可以是上述塑料膜和涂膜的层叠体。在这种情况下,优选将涂膜设置在塑料膜的内侧。塑料膜可包括与修改示例12中的塑料膜相似的材料。涂膜可包括与修改示例12中的涂膜相似的材料。
[0385]
如上所述,密封部分111a包围变形层23a的侧表面,且密封部分111b包围变形层23b的侧表面,这使得可以与修改示例12类似地,抑制由于水等导致的传感器20的功能劣化。
[0386]
在第二实施例(参见图11)中,密封部分111a可设置在检测层21a的第一表面21as1的外边缘部分与导电层24a的第二表面24as2的外边缘部分之间,以包围变形层23a的侧表面。密封部分111b可以设置在检测层21b的第二表面21bs2与导电层24b的第一表面24bs1之间,以包围变形层23b的侧表面。
[0387]
在第三实施例(参见图14)中,密封部分111a可设置在检测层21a的第一表面21as1的外边缘部分与导电层24a的第二表面24as2的外边缘部分之间,以包围变形层23a的侧表面。密封部分111b可以设置在检测层51b的第一表面21ba1的外边缘部分与导电层54b的第二表面54bs2的外边缘部分之间,以包围变形层53b的侧表面。
[0388]
在第四实施例(参见图17)中,密封部分111a可设置在检测层61a的第一表面61as1的外边缘部分与导电层24a的第二表面24as2的外边缘部分之间,以包围变形层23a的侧表面。密封部分111a可以设置在检测层61a的第二表面61as2的外边缘部分与导电层64a的第一表面64as1的外边缘部分之间,以包围变形层63a的侧表面。密封部分111b可以设置在检测层61b的第一表面61bs1的外边缘部分与导电层64b的第二表面64bs2的外边缘部分之间,以包围变形层63b的侧表面。密封部分111b可以设置在检测层61b的第二表面61bs2的外边缘部分与导电层24b的第一表面24bs1的外边缘部分之间,以包围变形层23b的侧表面。
[0389]
在第五实施例(参见图20)中,密封部分111b可设置在检测层71的第二表面71s2的外边缘部分与导电层74b的第一表面74bs1的外边缘部分之间,以包围变形层73的侧表面。
[0390]
在第六实施例中(参见图28),密封部分111a可设置在检测层71的第一表面71s1的外边缘部分与导电层74a的第二表面74as2的外边缘部分之间,以包围变形层121的侧表面。密封部分111b可以设置在检测层71的第二表面71s2的外边缘部分与导电层74b的第一表面74bs1的外边缘部分之间,以包围变形层73的侧表面。
[0391]
(修改示例14)
[0392]
如图36所示,第六实施例中的传感器120可以包括间隙层123,以代替变形层73(参见图28)。传感器120的侧表面可由覆盖层101覆盖。尽管未示出,但是传感器120的主表面(感测表面20s)和侧表面可以由覆盖层101覆盖。在这种情况下,外部材料122可以设置在覆盖层101的内侧,或者可以设置在覆盖层101的外侧。
[0393]
间隙层123具有绝缘性,并且将导电层74b与检测层71彼此间隔开。通过间隙层123的厚度来调整传感器20的初始电容。间隙层123可以几乎不会由于施加到感测表面20s的压力而发生弹性变形,以在导电层74b与检测层71之间保持大致恒定的间隔。
[0394]
间隙层123可以具有也可以不具有粘合性。在间隙层123具有粘合性的情况下,通过间隙层123将导电层74b和检测层71粘合在一起。具有粘合性的间隙层123例如包括单层的粘合层,或者其中在基底的两个表面上设置粘合层的层叠体(例如双面粘合膜)。
[0395]
如上所述,在传感器120包括间隙层123以代替变形层73的情况下,检测层71检测与感测部分se71和导电层74a之间的距离相对应的电容,并将检测结果输出到ic 13a。
[0396]
在上述示例中,描述了传感器120的侧表面由覆盖层101覆盖的示例;然而,如图37所示,传感器120也可以包括密封部分111a。密封部分111a设置在检测层71的第一表面71s1的外边缘部分与导电层74a的第二表面74as2的外边缘部分之间,以包围变形层121的侧表面。覆盖层101和密封部分111a可以组合使用。
[0397]
《7应用示例》
[0398]
[电子装置的示例]
[0399]
根据第一至第五实施例及其修改示例的传感器20、20a、20b、50、60或70的至少一种适用于各种电子装置。根据第六实施例及其修改示例的传感器120的至少一种也适用于各种电子装置。例如,这些传感器适用于个人计算机、诸如智能手机等移动电话、电视、遥控器、照相机、游戏机、导航系统、电子书、电子词典、便携式音乐播放器、键盘、可穿戴终端、收音机、立体声音响、医疗设备或机器人等。可穿戴终端的示例包括智能手表、头戴式显示器、腕带、戒指、眼镜、鞋或衣服等。
[0400]
[电子装置以外的示例]
[0401]
根据第一至第五实施例及其修改示例的传感器20、20a、20b、50、60或70的至少一种适用于除电子装置以外的各种事物。根据第六实施例及其修改示例的传感器120的至少一种也适用于除电子装置以外的各种事物。这些传感器例如适用于电动工具、冰箱、空调、热水器、微波炉、洗碗机、洗衣机、干燥机、照明设备和玩具等电气设备。此外,这些传感器适用于包括房屋在内的建筑物、建筑构件、车辆、诸如台桌或桌柜等家具、制造设备、分析仪器等。建筑构件的示例包括铺路石、墙体材料、地砖、地板等。车辆的示例包括轮式车辆(例如,汽车、摩托车等)、船只、潜艇、轨道车辆、飞机、航天器、电梯、游乐设备等。
[0402]
[对于机器人手的应用示例]
[0403]
根据第一至第五实施例及其修改示例的传感器20、20a、20b、50、60或70中的至少一种适用于机器人手。根据第六实施例及其修改示例的传感器120的至少一种也适用于机器人手。
[0404]
图27示出适用传感器113-1至113-16的机器人手140的配置。传感器113-1至113-16中的每一个是根据第一至第五实施例及其修改示例的传感器20、20a、20b、50、60和70中的任一个。传感器113-1至113-16中的每一个可以是根据第六实施例及其修改示例的传感器120中的至少一种。
[0405]
传感器113-1和113-2设置在机械手140中包括的手掌上。传感器113-3设置在机械手140中包括的拇指的手指掌面中的第一关节的上方,传感器113-4设置在拇指的手指掌面中的第一关节与第二关节之间。传感器113-5设置在食指的手指掌面中的第一关节的上方,
传感器113-6设置在食指的手指掌面中的第一关节与第二关节之间,传感器113-7设置在食指的手指掌面中的第二关节与第三关节之间。
[0406]
此外,传感器113-8设置在中指的手指掌面中的第一关节的上方,传感器113-9设置在中指的手指掌面中的第一关节与第二关节之间,传感器113-10设置在中指的手指掌面中的第二关节与第三关节之间。传感器113-11设置在无名指的手指掌面中的第一关节的上方,传感器113-12设置在无名指的手指掌面中的第一关节与第二关节之间,传感器113-13设置在无名指的手指掌面中的第二关节与第三关节之间。传感器113-14设置在小指的手指掌面中的第一关节的上方,传感器113-15设置在小指的手指掌面中的第一关节与第二关节之间,传感器113-16设置在小指的手指掌面中的第二关节与第三关节之间。
[0407]
[示例]
[0408]
以下,用示例详细描述本公开;然而,本公开不限于这些示例。
[0409]
在以下示例和比较例中,通过第一实施例中描述的测量方法确定隔离层和变形层(第一变形层和第二变形层)的25%cld、厚度和基重。
[0410]
以下的示例1至6的传感器对应于根据第三实施例的传感器50。应注意,在以下示例中,与上述实施例对应的部分由相同的参考符号表示来进行描述。
[0411]
[示例1至6和比较例1至5]
[0412]
通过层叠以下构件,制成传感器。
[0413]
第一导电层:厚度为30μm的导电布
[0414]
第一变形层:具有表1所示的25%cld、厚度和基重的海绵
[0415]
第一检测层:厚度为100μm的fpc
[0416]
隔离层:具有表1所示的25%cld、厚度和基重的硅胶
[0417]
第二导电层:厚度为30μm的导电布
[0418]
第二变形层:具有表1所示的25%cld、厚度和基重的海绵
[0419]
第一检测层:厚度为100μm的fpc
[0420]
粘合层:厚度为10μm的双面胶带与厚度为30μm的双面胶带的层叠体
[0421]
第三导电层:厚度为30μm的导电布
[0422]
需要注意的是,传感器被制造为使得传感器的两个表面之中的第一导电层侧的表面作为感测表面,而第三导电层侧的表面作为背面。
[0423]
(z轴方向的检测灵敏度)
[0424]
确定在使用φ6mm的硅橡胶击键器在z轴方向上以1n的压力从上方按压感测部分时的检测灵敏度(s/n)。
[0425]
(xy轴方向的检测灵敏度)
[0426]
确定在使用φ6mm的硅橡胶击键器在z轴方向上以1n的压力从上方按压感测部分的同时在xy轴方向上作用1n的剪切力时的检测灵敏度(s/n)。
[0427]
表1示出实施例1至6和比较例1至5的传感器的配置和评估结果。
[0428][0429]
从表1可以看出以下内容。
[0430]
在隔离层的25%cld值是第一和第二变形层中每一层的25%cld值的10倍或更多
倍的情况下,可检测压力和剪切力。
[0431]
为了提高对于压力和剪切力的两种检测灵敏度,优选隔离层的25%cld值为第一和第二变形层中每一层的25%cld值的50倍或更多,隔离层的厚度为第一和第二变形层中每一层的厚度的8倍或更多倍,并且隔离层的基重为第一和第二变形层中每一层的基重的25倍或更多倍。
[0432]
尽管本公开的实施例和修改示例已在上文中详细描述,但本公开不限于上述实施例和修改示例,并且可以基于本公开的技术概念进行各种修改。例如,上述实施例和修改示例中列出的配置、方法、过程、形状、材料、数值等仅为示例,必要时可使用不同的配置、方法、过程、形状、材料、数值等。上述实施例和修改示例的配置、方法、过程、形状、材料、数值等可以彼此组合,只要它们不偏离本公开的要点。在上述实施例和修改示例中的步骤中描述的数值范围中,一个步骤的数值范围的上限或下限可以被另一个步骤的数值范围的上限或下限替换。除非另有规定,上述实施例和修改示例中所示的材料可以单独使用,也可以结合使用其中的两种或更多种。
[0433]
此外,本发明可采用以下配置。
[0434]
(1)
[0435]
第一检测层,所述第一检测层具有第一表面、以及在与所述第一表面相反侧的第二表面,并且包括电容型的第一感测部分;
[0436]
第二检测层,所述第二检测层具有与所述第一检测层的所述第二表面相对的第一表面,并且包括电容型的第二感测部分;
[0437]
第一导电层,所述第一导电层被设置为与所述第一检测层的所述第一表面相对;
[0438]
第二导电层,所述第二导电层设置在所述第一检测层与所述第二检测层之间;
[0439]
隔离层,所述隔离层设置在所述第一检测层与所述第二导电层之间,以将所述第一检测层与所述第二导电层彼此隔离;
[0440]
第一变形层,所述第一变形层设置在所述第一导电层与所述第一检测层之间,并且根据在传感器的厚度方向上作用的压力而弹性变形;以及
[0441]
第二变形层,所述第二变形层设置在所述第二导电层与所述第二检测层之间,并且根据在所述传感器的厚度方向上作用的压力而弹性变形,其中
[0442]
所述隔离层的25%cld值是所述第一变形层的25%cld值的10倍或更多倍,以及
[0443]
所述隔离层的25%cld值是所述第二变形层的25%cld值的10倍或更多倍。
[0444]
(2)
[0445]
根据(1)所述的三轴传感器,其中
[0446]
所述隔离层的厚度是所述第一变形层的厚度的两倍或更多倍,以及
[0447]
所述隔离层的厚度是所述第二变形层的厚度的两倍或更多倍。
[0448]
(3)
[0449]
根据(1)或(2)所述的三轴传感器,其中
[0450]
所述隔离层的基重是所述第一变形层的基重的10倍或更多倍,以及
[0451]
所述隔离层的基重是所述第二变形层的基重的10倍或更多倍。
[0452]
(4)
[0453]
根据(1)至(3)中任一项所述的三轴传感器,其中所述隔离层包括凝胶。
[0454]
(5)
[0455]
根据(1)至(4)中任一项所述的三轴传感器,其中通过在所述第一表面的面内方向上作用的剪切力,所述隔离层在所述传感器的面内方向上弹性变形。
[0456]
(6)
[0457]
根据(1)至(5)中任一项所述的三轴传感器,其中
[0458]
所述第一检测层和所述第二检测层中的每一个包括第一电极、第二电极和接地电极,
[0459]
所述第一感测部分包括在所述第一检测层中包括的所述第一电极和所述第二电极,以及
[0460]
所述第二感测部分包括在所述第二检测层中包括的所述第一电极和所述第二电极。
[0461]
(7)
[0462]
根据(6)所述的三轴传感器,其中所述第一检测层的所述接地电极、所述第二检测层的所述接地电极、所述第一导电层和所述第二导电层连接至参考电位。
[0463]
(8)
[0464]
根据(1)至(7)中任一项所述的三轴传感器,其中所述第一导电层和所述第二导电层具有柔性或弹性中的至少一种。
[0465]
(9)
[0466]
根据(1)至(8)中任一项所述的三轴传感器,其中
[0467]
所述第一检测层包括多个所述第一感测部分,
[0468]
所述第二检测层包括多个所述第二感测部分,以及
[0469]
所述第二感测部分的布置间距大于所述第一感测部分的布置间距,并且所述第二感测部分的面积大于所述第一感测部分的面积。
[0470]
(10)
[0471]
根据(1)至(9)中任一项所述的三轴传感器,其中所述第二变形层的25%cld值大于所述第一变形层的25%cld值。
[0472]
(11)
[0473]
根据(1)至(10)中任一项所述的三轴传感器,进一步包括设置在所述第一导电层侧的前表面上的前表面层,其中
[0474]
所述前表面层的前表面的静摩擦系数为1或更多。
[0475]
(12)
[0476]
根据(1)至(11)中任一项所述的三轴传感器,其中所述第一检测层的外边缘位于所述第二检测层的外边缘的内侧。
[0477]
(13)
[0478]
根据(1)至(12)中任一项所述的三轴传感器,其中所述隔离层在所述传感器的面内方向上划分为多个部分。
[0479]
(14)
[0480]
根据(1)至(13)中任一项所述的三轴传感器,其中
[0481]
所述第二检测层具有在与所述第二检测层的所述第一表面相反侧的第二表面,以
及
[0482]
所述三轴传感器进一步包括第三导电层,所述第三导电层被设置为与所述第二检测层的所述第二表面相对。
[0483]
(15)
[0484]
一种三轴传感器,包括:
[0485]
第一检测层,所述第一检测层具有第一表面、以及在与所述第一表面相反侧的第二表面,并且包括电容型的第一感测部分;
[0486]
第二检测层,所述第二检测层具有与所述第一检测层的所述第一表面相对的第一表面、以及在与所述第二检测层的所述第一表面相反侧的第二表面,并且包括电容型的第二感测部分;
[0487]
隔离层,所述隔离层设置在所述第一检测层与所述第二检测层之间,以将所述第一检测层与所述第二检测层彼此隔离;
[0488]
第一导电层,所述第一导电层被设置为与所述第一检测层的所述第一表面相对;
[0489]
第二导电层,所述第二导电层被设置为与所述第二检测层的所述第二表面相对;
[0490]
第一变形层,所述第一变形层设置在所述第一导电层与所述第一检测层之间,并且根据在传感器的厚度方向上作用的压力而弹性变形;和
[0491]
第二变形层,所述第二变形层设置在所述第二导电层与所述第二检测层之间,并且根据在所述传感器的厚度方向上作用的压力而弹性变形,其中
[0492]
所述隔离层的25%cld值是所述第一变形层的25%cld值的10倍或更多倍,以及
[0493]
所述隔离层的25%cld值是所述第二变形层的25%cld值的10倍或更多倍。
[0494]
(16)
[0495]
根据(15)所述的三轴传感器,其中
[0496]
所述隔离层包括
[0497]
第三导电层,
[0498]
第一隔离层,所述第一隔离层设置在所述第一检测层与所述第三导电层之间,以将所述第一检测层与所述第三导电层彼此隔离,以及
[0499]
第二隔离层,所述第二隔离层设置在所述第三导电层与所述第二检测层之间,以将所述第三导电层与所述第二检测层彼此隔离。
[0500]
(17)
[0501]
根据(15)所述的三轴传感器,进一步包括:
[0502]
第四导电层,所述第四导电层设置在所述第一检测层与所述隔离层之间;
[0503]
第三变形层,所述第三变形层设置在所述第一检测层与所述第四导电层之间;
[0504]
第五导电层,所述第五导电层设置在所述隔离层与所述第二检测层之间;以及
[0505]
第四变形层,所述第四变形层设置在所述第五导电层与所述第二检测层之间。
[0506]
(18)
[0507]
一种传感器模块,包括根据(1)至(17)中任一项所述的三轴传感器。
[0508]
(19)
[0509]
一种电子装置,包括:
[0510]
根据(18)所述的传感器模块;以及
[0511]
计算部分,所述计算部分基于从所述传感器模块输出的第一感测部分和第二感测部分的输出信号分布来计算三轴力。
[0512]
(20)
[0513]
根据(19)所述的电子装置,进一步包括具有曲面的外部材料,其中
[0514]
所述三轴传感器设置在所述曲面上。
[0515]
(21)
[0516]
根据(1)至(17)中任一项所述的三轴传感器,进一步包括覆盖层,其中
[0517]
所述第一检测层、所述第二检测层、所述第一导电层、所述第二导电层、所述隔离层、所述第一变形层和所述第二变形层被包括在层叠体中,以及
[0518]
所述覆盖层覆盖至少所述层叠体的侧表面。
[0519]
(22)
[0520]
根据(1)至(17)中任一项所述的三轴传感器,进一步包括:
[0521]
第一密封部分,所述第一密封部分设置在所述第一导电层与所述第一检测层之间以包围所述第一变形层的侧表面;以及
[0522]
第二密封部分,所述第二密封部分设置在所述第二导电层与所述第二检测层之间以包围所述第二变形层的侧表面。
[0523]
(23)
[0524]
一种防水三轴传感器,包括:
[0525]
根据(1)至(17)中任一项所述的三轴传感器;以及
[0526]
覆盖层,所述覆盖层覆盖至少所述三轴传感器的侧表面。
[0527]
参考标记列表
[0528]
10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电子装置
[0529]
11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传感器模块
[0530]
12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
主机设备
[0531]
13a、13b
ꢀꢀꢀꢀꢀ
控制器ic
[0532]
20、20a、20b、50、60、70、120
ꢀꢀꢀ
传感器
[0533]
20s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
感测表面
[0534]
21a、21b、21c、51b、61a、61b、71
ꢀꢀ
检测层
[0535]
21a1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接部分
[0536]
21a2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接端子
[0537]
21as1、21bs1、21cs1、31s1、51bs1、61as1、61bs1、71s1
ꢀꢀ
第一表面
[0538]
21as2、21bs2、21cs2、31s2、51bs2、61as2、61bs2、71s2
ꢀꢀ
第二表面
[0539]
22、25、25a、25b、52、62、72
ꢀꢀ
隔离层
[0540]
23a、23b、53b、63a、63b、73、121
ꢀꢀ
变形层
[0541]
24a、24b、24c、54b、54c、64a、64b、74a、74b
ꢀꢀꢀ
导电层
[0542]
31
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
基底
[0543]
32、33、38
ꢀꢀ
多条布线线路
[0544]
34a、34b
ꢀꢀꢀꢀ
覆盖膜
[0545]
35a、35b
ꢀꢀꢀꢀ
粘合层
[0546]
36
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
感测电极
[0547]
36a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接线
[0548]
37
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
脉冲电极
[0549]
37a
ꢀꢀꢀꢀꢀꢀꢀꢀ
布线线路
[0550]
37b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
通孔
[0551]
41
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
物体
[0552]
55
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
粘合层
[0553]
60a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一传感器
[0554]
60b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二传感器
[0555]
81
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
前表面层
[0556]
82a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一层叠体
[0557]
82b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二层叠体
[0558]
83
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
覆盖层
[0559]
83a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
构造体
[0560]
83b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
保护层
[0561]
91
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置检测器
[0562]
91a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
突出部分
[0563]
91b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位置传感器
[0564]
91c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
焊料
[0565]
101
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
覆盖层
[0566]
102
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
壳体
[0567]
111a、111b
ꢀꢀ
密封部分
[0568]
122
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
外部材料
[0569]
123
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
间隙层
[0570]
db1,db2
ꢀꢀꢀꢀ
输出信号分布
[0571]
p1,p2
ꢀꢀꢀ
布置间距
[0572]
se21、se22、se23、se52、se61、se62、se71
ꢀꢀ
感测部分
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
