1.本发明涉及一种建筑模型数据辅助系统和建筑模型数据辅助方法。
背景技术:
2.在高层建筑的规划和施工时,应用被称为bim(building information modeling:建筑信息模型)数据等的建筑模型数据,并推进相关人员之间的信息共享。建筑模型数据是包含多个建筑模型部件的数据,建筑模型部件是表示构成高层建筑的建材或电梯等设备的数据。
3.构成建筑模型部件的信息至少包含2d或3d形状数据,除此之外还可以包含规格、型号、制造商等任何可能的信息。建筑模型数据还包含一般的bim数据。
4.专利文献1公开了以组合了电梯的建筑模型部件的建筑模型数据作为输入,使用仿真技术进行评价的方法和装置。此外,专利文献2公开了在仿真电梯使用的技术中,再现电梯层站处的使用者的详细移动或判断等的装置。现有技术文献专利文献
5.专利文献1:日本专利特开2014-10659号公报专利文献2:wo2017/199532号公报
技术实现要素:
发明所要解决的技术问题
6.但是,在使用专利文献1所公开的系统来仿真人的动作的方法中,在多人使用电梯的情况下,没有考虑在层站等待的行为或排队乘梯的行为。在专利文献2中,为了再现电梯前的排队乘梯行为,需要输入电梯层站的排队起始位置的数据。即,在专利文献1和专利文献2所记载的技术中,在输入了建筑模型数据的建筑模型中,没有人工追加输入排队起始位置等,没有考虑对使用电梯时在层站处等待的行为或排队乘梯的行为进行细致的仿真。
7.因此,本发明的目的是提供一种建筑模型数据辅助系统和建筑模型数据辅助方法,无需人工追加输入排队起始位置等,能够细致地仿真电梯使用者在层站处等待的行为或排队乘梯的行为。用于解决技术问题的技术手段
8.为了解决上述问题,采用例如权利要求所记载的结构。本技术包含多个解决上述问题的手段,若举其中一个示例,则本发明包括:用于保存建筑模型数据和仿真数据的存储部;读取保存于该存储部中的建筑模型数据的建筑模型数据读取部;以及基于建筑模型数据读取部所读取的建筑模型数据来推测使用电梯的人排
队的起始位置的排队起始位置推测部。发明效果
9.根据本发明,无需人工编辑数据,就能实现考虑到电梯层站处人的详细移动的仿真。上述以外的问题、结构以及效果通过以下实施方式的说明变得更为明确。
附图说明
10.图1是示出本发明的建筑模型数据辅助系统的第1实施方式例中的功能结构的系统框图。图2是示出本发明的建筑模型数据辅助系统的第1实施方式例中的装置的硬件结构的图。图3是本发明的建筑模型数据辅助系统的第1实施方式例中的排队起始位置推测处理的流程图。图4是示出作为本发明的建筑模型数据辅助系统的第1实施方式例的排队起始位置推测处理、即层站处的电梯的配置为面对面配置时的推测处理的过程的图。图5是示出作为本发明的建筑模型数据辅助系统的第1实施方式例的排队起始位置推测处理、即层站处的电梯的配置为直线一排配置时的推测处理的过程的图。图6是示出作为本发明的建筑模型数据辅助系统的第1实施方式例的排队起始位置推测处理、即层站处的电梯的配置为直线一排配置且层站出入口正对着电梯门时的推测处理的过程的图。图7是示出本发明的建筑模型数据辅助系统的第2实施方式例中的功能结构的系统框图。图8是本发明的建筑模型数据辅助系统的第2实施方式例中的排队起始位置推测处理的流程图。图9是示出本发明的建筑模型数据辅助系统的第2实施方式例中的测量部的测量信息的一个示例的图。图10是示出本发明的建筑模型数据辅助系统的第2实施方式例中使用测量部的排队起始位置推测处理的过程的一个示例的图。图11是示出从本发明的建筑模型数据辅助系统中的建筑模型数据提取出的电梯层站数据的一个示例的图。图12是示出本发明的建筑模型数据辅助系统中使用传感器来推测排队起始位置的处理的流程图。
具体实施方式
11.《第1实施方式例的说明》以下,将参考图1至图6对本发明第1实施方式例(以下称为“本示例”)的建筑模型数据辅助系统进行说明。
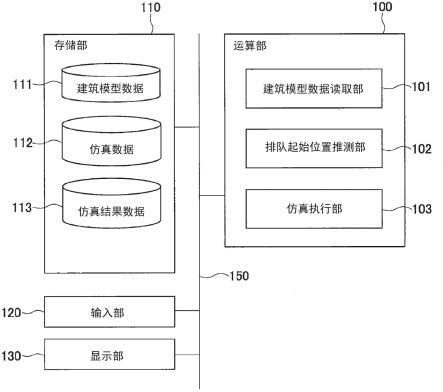
12.[本示例的建筑模型数据辅助系统的功能结构]图1是示出本示例的建筑模型数据辅助系统的结构的图。使用图1对本示例的建筑
模型数据辅助系统的整体结构进行说明。本示例的建筑模型数据辅助系统包括通过总线150连接的运算部100、存储部110、输入部120和显示部130。另外,建筑模型数据辅助系统的各部分也可以不是通过总线150连接而是通过网络连接。输入部120和显示部130是附加结构,并且对于本示例的建筑模型数据辅助系统来说不是必需的。
[0013]
存储部110至少具有保管建筑模型数据111和仿真数据112的存储区域,但也可以进一步具有用于保管仿真结果数据113的存储区域。运算部100至少包括建筑模型数据读取部101、排队起始位置推测部102和仿真执行部103。另外,运算部100可以构成为单独的运算部,但也可以构成为将运算部100的一部分设置在未图示的服务器上等而将运算部100分散为多个的结构。以上是本示例的建筑模型数据辅助系统的结构。
[0014]
[本示例的建筑模型数据辅助系统中的各结构的功能]运算部100的建筑模型数据读取部101从存储部110读取建筑模型数据111。建筑模型数据读取部101基于读取到的建筑模型数据111来识别建筑模型数据的形状,并转换为能够由仿真执行部103执行的格式的数据。
[0015]
这里,转换为可执行格式的数据意味着将建筑模型数据111转换为例如电梯层站数据。即,在转换为该可执行格式数据时,建筑模型数据读取部101从建筑模型数据111中提取电梯层站数据。然后,建筑模型数据读取部101将提取出的电梯层站数据输入到排队起始位置推测部102。另外,作为提取电梯层站数据的处理,可以考虑截取到电梯门一定距离内的空间作为层站的方法。
[0016]
排队起始位置推测部102基于输入的电梯层站数据来推测排队起始位置。排队起始位置推测部102推测出的排队起始位置信息被输入到仿真执行部103。此时,将建筑模型数据读取部101读取到的建筑模型数据111转换为可执行仿真的格式后的数据也被输入到仿真执行部103。
[0017]
仿真执行部103推测在电梯层站处人的详细移动,将该仿真结果存储到存储部110的仿真结果数据113中。另外,也可以不将仿真结果存储在存储部110中,而直接输出到显示部130中进行显示。
[0018]
另外,仿真执行部103中的仿真可以使用例如在2018年1月19日举行的日本机械学会“升降机、游乐设施等最新技术和进步技术论坛”中,发明人发表的《实现大楼内人员顺畅移动的人流仿真技术的开发》(藤原正康,鸟谷部训,羽鸟贵大)中公开的公知的仿真技术。
[0019]
[本示例的建筑模型数据辅助系统的硬件结构]图2是示出图1所示的本示例的建筑模型数据辅助系统的硬件结构的图。如图2所示,本例的建筑模型数据辅助系统包括连接到总线200的cpu(central processing unit:中央处理器)201、rom(read only memory:只读存储器)202、ram(random access memory:随机存储器)203和非易失性存储器204。此外,还包括用于与外部进行通信的通信接口(通信部if)205。
[0020]
cpu201从rom202读取并执行实现本示例的建筑模型数据辅助系统的各部分功能的软件的程序代码。在本示例的建筑模型数据辅助系统内执行的运算处理的中途产生的变量等被临时写入ram203中。通过cpu201执行rom202中记录的程序代码,实现上述本示例的建筑模型数据辅助系统的各种功能。
[0021]
例如将nic(network interface card:网络接口卡)等用于通信接口205。该通信接口205在图1中未示出,但在必要时用于与外部设备的通信。
[0022]
非易失性存储器204由ssd(固态驱动器)等非易失性存储器构成,存储并保存使cpu201进行动作所需的程序、数据等。此外,非易失性存储器204构成图1的存储部110。此外,在图2中设置有输入部206和输出部207,但是输入部206和输出部207并非本示例的建筑模型数据辅助系统所必需的硬件结构。这里,输出部207包含图1中的显示部130。
[0023]
[本示例的建筑模型数据辅助系统的处理流程]接着,将参照图3的流程图和图4至图6所示的具体示例的图,对本示例的建筑模型数据辅助系统的排队起始位置推测部102中的排队起始位置的推测处理进行说明。首先,在各电梯门的朝向中选择数量最多的门的朝向“d”(步骤s301)。例如,在6部电梯相向配置的一般面对面配置的情况下,3部电梯的门的朝向是相向的。在这种情况下,相向的电梯的数量为“3”而达到最大,所以选择该数量最大的朝向之一设为“d”。
[0024]
使用图4的具体示例进行说明,图4示出将4台电梯两两相向配置而成的面对面配置的电梯层站。在步骤s301中,从各电梯获取门的朝向“d”,但是在图4中,电梯401和402的门、以及电梯403和电梯404的门分别两两设置在相同方向上。由于各门的方向431的数量相同且最大,所以设电梯401和402的门的朝向431的方向为“d”。即使假设电梯403和404的门的朝向是“d”,也可以同样地执行后续处理。
[0025]
接着,将相对于电梯门的朝向431的方向“d”旋转了90度的方向和旋转了-90度的方向作为扫描方向进行扫描。然后,在从门的方向“d”旋转了90度的方向上,对到出入口400的距离最小的位置进行扫描。在图4中,用虚线432表示上述扫描的位置。接下来,求出扫描对象的各位置到出入口400的距离,计算出最接近出入口400的地点433,设为“p1”(步骤s302)。在图4中,将扫描位置到出入口400的距离表示为实线图413。横轴411表示扫描位置,纵轴412表示到出入口的距离。
[0026]
从该实线图413可以清楚地看出,位于出入口400侧的一端的地点433最接近出入口。即,在虚线432所表示的扫描位置中,该位于出入口400侧的一端的位置433成为“p1”。
[0027]
接着,从地点433的位置“p1”沿着与门的方向431“d”方向相同的虚线434扫描,计算出最接近出入口400的地点,将该地点435设为“p2”(步骤s303)。然后,求出在该虚线434的各位置到出入口400的距离。虚线434的各个位置到出入口400的距离如曲线图423所示。在该曲线图423中,纵轴421表示扫描位置,横轴422表示到出入口400的距离。
[0028]
在曲线图423中,到出入口400的距离最小的部位由范围424和范围425表示,不能唯一地确定。因此,将与到出入口400的距离最小的多个位置的重心位置426对应的扫描位置435设为最接近出入口400的地点“p2”。
[0029]
然后,将最接近出入口400的地点即扫描位置435的位置“p2”作为排队起始位置输出(步骤s304)。以上是使用图3和图4的排队起始位置推测处理过程的说明。
[0030]
这里,如图4所示,通过确定每隔一定间隔进行离散扫描的点,并从确定的点开始
搜索出入口400,由此能够容易地进行扫描。从扫描位置的任意点到出入口400的距离通过将空间离散化来测量。也可以任意地对扫描范围设置限制。作为扫描范围限制的示例,可以考虑离最近的电梯的距离不超过上限的范围。
[0031]
图5是与图4不同的电梯配置的具体示例,示出了将4台电梯排成一排配置的平面配置的电梯层站数据。以下,使用图5对推测排队起始位置的过程进行说明。首先,在图3的步骤s301中,从各部电梯获取门的方向531即“d”。在本示例中,电梯501、502、503、504这4部电梯的门朝向相同的方向531。因此,该方向531是最大数量“4”的电梯的朝向,并且将该方向设为“d”。
[0032]
然后,在图3的步骤s302中,在从门的方向531“d”旋转90度的方向上,对离出入口500的距离最小的位置进行扫描。在图5中,沿着虚线532扫描,求出扫描对象的各个位置到出入口500的距离。各扫描位置到出入口500的距离如曲线图513所示。在该曲线图513中,横轴511表示扫描位置,纵轴512表示离出入口的距离。从图5的曲线图513可知,位于出入口侧的一端514最接近出入口500。因此,将相当于该位于出入口侧的一端514的扫描位置533设为“p1”。
[0033]
接着,在图3的步骤s303中,从位于出入口500侧的一端的位置533“p1”开始,沿着与门的方向531“d”相同的方向扫描最接近出入口500的地点用虚线534表示扫描的位置。然后,求出在该扫描对象的各位置到出入口500的距离。各扫描位置到出入口500的距离的关系如曲线图523所示。在该曲线图523中,纵轴521表示扫描位置,横轴522表示离出入口的距离。从曲线图523可知,到出入口500的距离最小的部位是范围524和范围525,不能唯一地确定。因此,将到出入口500的距离最小的多个位置的重心即位置526所对应的接近出入口500的扫描位置535设为“p2”。
[0034]
然后,在图3的步骤s304中,输出接近出入口500的扫描位置535的地点“p2”作为排队起始位置。以上完成了使用图5对排队起始位置的推测处理过程的说明。
[0035]
图6与图5同样,是将4台电梯排成一排配置的平面配置,表示出入口600面向电梯门的方向631的电梯层站。以下,使用图6对推测排队起始位置的过程进行说明。
[0036]
首先,在图3的步骤s301中,获取各台电梯的门的方向“d”。在本示例中,电梯601、602、603、604这4部电梯的门朝向相同的方向631设置。因此,该相同方向631是最大数量“4”的电梯的朝向,该门的方向631是“d”。
[0037]
接着,在图3的步骤s302中,在从门的方向631“d”旋转90度的方向上,沿着虚线632对离出入口600的距离最小的位置进行扫描。然后,求出在该虚线632上的各扫描位置到出入口600的距离。各扫描位置到出入口600的距离如曲线图613所示。曲线图613的横轴611表示扫描位置,纵轴612表示到出入口600的距离。
[0038]
从曲线图613可知,离出入口600的距离最小的部位是范围614和范围615,不能唯一地确定。因此,将到出入口600的距离最小的范围614和615中的重心616的位置所对应的扫描位置633作为地点“p1”。
[0039]
然后,在图3的步骤s303中,从扫描位置633的地点“p1”沿着虚线634向出入口600扫描,求出扫描对象的位置到出入口600的距离。然后,将最接近出入口600的扫描位置的一端635设为地点“p2”。曲线图623表示扫描位置到出入口600的距离。该曲线图623的纵轴621
表示扫描位置,横轴622表示到出入口600的距离。
[0040]
从图6可知,根据曲线图623,作为扫描位置的虚线634中的位于出入口600侧的一端635的位置到出入口600的距离最小。因此,将位于出入口600侧的一端635的位置设为地点“p2”。然后,在图3的步骤s304中,输出位于出入口600侧的一端635的地点“p2”作为排队起始位置。以上完成了使用图6对排队起始位置的推测处理过程的说明。
[0041]
《本发明的第2实施方式例的整体结构的说明》接着,将参考图7至图12对作为本发明第2实施方式例的建筑模型数据辅助系统进行说明。图7示出了本发明第2实施方式例的建筑模型数据辅助系统的功能性装置结构。另外,由于硬件结构与图2所示的第1实施方式例相同,所以省略说明。本发明的第2实施方式例与图1所示的第1实施方式例的不同之处在于设置有测量部140。即,本发明的第2实施方式例是将由测量部140测量到的测量数据作为排队起始位置的推测处理的输入的实施方式例。以下,参照图7至图10,以与第1实施方式例的不同点为中心进行说明。
[0042]
参照图7进行说明,本发明的第2实施方式例的建筑模型数据辅助系统包括运算部100、存储部110和测量部140。测量部140直接或经由网络连接到总线150另外,与第1实施方式例同样,输入部120和显示部130不是必需的结构,但也可以设置。与图1所示的第1实施方式例同样,在存储部110中至少保管有建筑模型数据111以及仿真数据112。另外,根据需要还保管仿真结果数据113。
[0043]
此外,与第1实施方式例同样,运算部100包括建筑模型数据读取部101、排队起始位置推测部102、仿真执行部103。运算部100可以构成为单独的运算部,也可以构成为分散的多个。另外,测量部140使用照相机等图像传感器、深度传感器、红外线传感器等。
[0044]
图8是示出第2实施方式例的建筑模型数据辅助系统中的排队起始位置推测部102的处理流程的流程图。首先,照相机等测量部140测量包含电梯使用者在内的人在电梯层站的不同位置处的停留时间(步骤s801)。然后,计算人的停留时间长的位置“p3”(步骤s802)。这里,停留时间长的位置“p3”是指电梯层站中人的密度高的部位,例如图10的数字1010所示的空间便是这样的位置。然后,排队起始位置推测部102输出停留时间长的位置“p3”作为排队起始位置(步骤s803)。
[0045]
图9示出由设置在电梯层站处的照相机等测量部140所测量的测量结果的图像数据的示例。该图像数据表示在从电梯层站900的上部朝向电梯层站的入口901的方向设置有照相机等测量部140的情况下测量到的图像数据的示例。该图像数据显示了电梯使用者911、912、913、914这4人在电梯层站的入口排队等待电梯到达的情形。
[0046]
接着,图10是包含4台电梯1001、1002、1003、1004的电梯层站1000的平面图。即,图10是根据由照相机等测量部140持续测量的多个人物的图像数据,在电梯层站1000的平面图上表示出人的密度的图。此外,图10表示人的密度的大小,数字1011表示密度相对低的空间,数字1010表示
密度相对高的空间。作为人的密度高的空间而表示的数字1010的空间是规定阈值以上的空间。已经在图8中作为第2实施方式例进行了说明,该数字1010所表示的人的密度大的空间的位置成为排队起始位置“p3”。即,在第2实施方式例中,将人的密度高的空间中靠近电梯的位置推测为排队起始位置“p3”。
[0047]
图11示出了从存储在存储部110中的建筑模型数据111中提取出的电梯层站数据的一个示例。这里,对建筑模型数据111以及建筑模型数据111中包含的电梯层站数据进行说明。建筑模型数据111中包含有电梯层站数据。这里,电梯层站数据至少包含与电梯层站的地板1100相关的信息、与电梯1101、1102、1103、1104相关的信息、以及出入口或连接出入口的位置1110的信息。与地板1100相关的信息和与电梯1101、1102、1103和1104相关的信息分别具有位置和形状,图11示出了这些信息的平面图。
[0048]
本发明的建筑模型数据辅助系统的出入口不仅包括大楼的出入口,还包括各楼层的办公室等租户空间的出入口。出入口的信息包含在建筑模型数据111内。从而,可以通过识别建筑模型数据111所包含的门或租户区域来推测大楼内的人流,也可以通过人工来指定。根据其地板信息,可以识别电梯层站中可以通行的空间。
[0049]
图12是用于说明图7所示的照相机等测量部140获得的多个图像数据作为输入来推测排队起始位置的处理的流程图。首先,测量部140获取由照相机等测量到的图像数据作为其测量结果(步骤s1201)。然后,测量部140根据在步骤s1201中获取的各图像数据,识别人的位置(步骤s1202)。这里,为了从图像数据识别出人的位置,使用广为人知的一般图像识别方法和机器学习等方法。
[0050]
接着,将根据各图像数据识别出的人的位置映射到平面图上(步骤s1203)。为了映射到平面图上,需要将图像数据的坐标系中的人的位置转换到平面图上的坐标系。因此,首先,根据在图像中识别出的人的尺寸大小来推测从测量部140的设置位置到识别出的人的位置的距离。然后,使用推测出的距离信息、图像数据的坐标系的位置、测量部140的设置位置的坐标及朝向、测量部140的视角的信息来向平面图上的坐标系进行转换。另外,坐标系的变换方法不限于这里所说明的方法。也可以用其它方法来进行。
[0051]
接着,基于从各图像数据得到的平面图上的人的位置,计算平面图上的各位置的密度(步骤s1204)。所谓平面上的人的密度,是指在每个测量位置上测量到的图像数据数量中有人存在的数据数量所占的比例的值。在步骤s1204中计算出的人的密度的结果已经在图10中进行了说明,但是计算出该密度的位置也可以在以任意间隔离散化的网格中进行评估。
[0052]
最后,计算人的密度高的位置,输出密度高且到电梯的距离短的位置作为排队起始位置(步骤s1205)。只要判定人的密度高的位置是否超过了事先设定的阈值即可。另外,阈值可以使用事先设定的值,或者也可以根据日期或时间段动态地变更阈值。此外,阈值也可以根据位置或场所而改变。例如,也可以考虑根据与墙壁的距离改变阈值。
[0053]
另外,在电梯层站闲散的时间,由于电梯使用者没有必要排队,所以没有必要测量
排队起始位置。因此,也可以仅从上班时或下班时的时间段、午餐时的时间段等限定了时间段的测量结果来计算排队起始位置。此外,也可以对人的密度设定一定的阈值,以密度超过阈值的时间段的测量结果作为对象来推测排队起始位置。以上是对推测排队起始位置的处理的说明。
[0054]
如上所述,根据本发明,可以实现如下的建筑模型数据辅助系统:通过测量部140推测排队起始位置,将推测出的排队起始位置和建筑模型数据作为输入,在所输入的建筑模型中,对使用电梯时在层站等待的行为或排队乘梯的行为进行细致的仿真。
[0055]
另外,根据本发明,可以实现如下的建筑模型数据辅助系统:将建筑模型数据作为输入,不需要人工追加输入排队起始位置等,在所输入的建筑模型内,能够对使用电梯时在层站等待的行为或排队乘梯的行为进行细致的仿真。
[0056]
另外,本发明并不局限于上述实施方式,也包含各种变形方式。上述实施方式是为了对本发明进行容易理解的说明而进行的说明,本发明并不一定局限于具备所说明的所有的结构,也可以适当地应用于其它结构。
[0057]
此外,上述的各结构、功能、处理部、处理单元等也可以将它们的一部分或者全部用例如通过集成电路设计等得到的硬件来实现。另外,上述的各结构、功能等也可以通过处理器解释并执行实现各自功能的程序而用软件来实现。实现各功能的程序、表格、文件等信息能够置于存储器、硬盘、ssd(solid state drive:固态硬盘)等记录装置、或者ic卡、sd卡、dvd等记录介质。
[0058]
此外,在图上示出了考虑到说明上所必须的控制线、信息线,但并不限于是示出了产品上所必须的全部的控制线、信息线。实际上也可以认为几乎所有的结构都是互相连接的。标号说明
[0059]
100运算部,101建筑模型数据读取部,102排队起始位置推测部,103仿真执行部,110存储部,111建筑模型数据,112仿真数据,113仿真结果数据,120输入部,130显示部,140测量部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。