1.本发明涉及一种用于车辆、尤其是用于机动车的线控转向系统,用于在线控转向系统在车辆中的符合功能的装入状态中使至少一个可转向车轮转向,其中,线控转向系统具有:转向输入设备,用于通过驾驶员进行转向输入;反馈执行器装置,用于在转向输入设备上产生限定的、取决于转向输入和/或行驶状态的反馈转向力矩;能与至少一个可转向车轮连接的转向装置,所述转向装置具有转向执行器装置;控制装置;以及反馈执行器监控装置。在此,反馈执行器监控装置构造和设置成,在线控转向系统的至少一个运行状态中识别反馈执行器装置的至少一个状态、尤其是至少一个故障状态,并且产生和输出状态信号,并且控制装置构造和设置成,在线控转向系统的至少一个运行状态中根据转向输入并且根据反馈执行器装置的状态来操控转向执行器装置。
2.此外,本发明涉及一种用于运行这种线控转向系统的方法。
3.此外,本发明涉及一种车辆、尤其机动车,所述车辆具有前述线控转向系统。
背景技术:
4.线控转向系统以及用于运行线控转向系统的相应方法原则上由现有技术公知,尤其是例如由de 10 2016 009 684 a1公知了一种用于在故障情况中运行线控转向系统的方法,以及一种用于使转向装置与转向输入设备的位置同步的方法。
5.例如,尤其是从上述de 10 2016 009 684 a1中已知的是,在反馈执行器装置失效的情况中并且因此在行驶期间反馈执行器装置的故障状态中以及伴随于此的借助反馈执行器装置在转向输入设备处产生的转向力矩降低和因此驾驶员的无意的和不期望的过度转向输入降低时,减弱、即减少或者甚至完全抑制基于该过度转向输入的对转向执行器装置的操控,以避免过度强烈的、不合适的、并且在实际转向输入的程度上不期望的车辆反应并且尽可能地实现与实际驾驶员期望相对应的车辆反应。在此,尤其会出现在转向输入设备与一个或多个可转向车轮之间的同步偏差,该同步偏差会导致对驾驶员的刺激。在一些情况中,由于所产生的偏差,还可能需要必须限制线控转向系统的功能和/或必须完全关闭该线控转向系统,这伴随着有限的可用性并且是不期望的。
技术实现要素:
6.在该背景下,本发明的任务是,提供一种替代的、尤其是改进的线控转向系统,尤其是一种尤其是在故障情况中也可简单地被控制并且此外优选具有高的可用性的线控转向系统。本发明的另外的任务是提供一种用于运行相应的线控转向系统的相应方法以及一种具有这种线控转向系统的车辆。
7.该任务通过具有权利要求1的特征的线控转向系统、通过具有权利要求15的特征的用于运行这种线控转向系统的方法以及通过具有权利要求18的特征的车辆来解决。
8.本发明的有利的以及优选的设计方案是另外的权利要求的主题并且在下面被更详细阐述。权利要求的措辞通过明确引用而成为说明书的内容。
9.根据本发明的线控转向系统优选构造用于车辆、尤其是机动车,并且用于在线控转向系统在车辆中符合功能的装入状态中使至少一个可转向车轮转向,其中,根据本发明的线控转向系统具有:转向输入设备,用于通过驾驶员进行转向输入的;反馈执行器装置,用于在转向输入设备上产生限定的、取决于转向输入和/或行驶状态的反馈转向力矩的;能与至少一个可转向车轮连接的转向装置,所述转向装置具有转向执行器装置;控制装置;以及反馈执行器监控装置。反馈执行器监控装置在此构造和设置成,在线控转向系统的至少一个运行状态中识别反馈执行器装置的至少一个状态、尤其是至少一个故障状态,并且产生和尤其向控制装置输出状态信号,在故障情况中优选是故障信号。控制装置构造和设置成,在线控转向系统的至少一个运行状态中,根据转向输入以及根据反馈执行器装置的状态、尤其根据反馈执行器装置的当前状态来操控所述转向执行器装置。
10.在此,根据本发明的线控转向系统的特征在于,所述线控转向系统还具有同步监控装置,其中,同步监控装置构造和设置成,在所述线控转向系统的至少一个运行状态中确定在所述转向输入设备的当前位置与所述转向装置的、所述转向执行器装置的和/或所述至少一个可转向车轮的当前位置之间的同步偏差、尤其是当前的同步偏差,并且其中,控制装置还构造和设置成,在线控转向系统的至少一个运行状态中还根据由同步监控装置所求取的同步偏差、尤其根据当前的同步偏差、优选附加地操控转向执行器装置。
11.根据转向输入以及根据反馈执行器装置的状态、尤其根据反馈执行器装置的当前状态来操控转向执行器装置,能够实现提供特别有利的线控转向系统、尤其是以下线控转向系统,该线控转向系统实现在反馈执行器装置的不同状态中实现对转向执行器装置的不同操控,例如在反馈执行器装置的故障状态中与在反馈执行器装置的无故障状态中不同地操控转向执行器装置。由此在转向执行器装置的在相应的状态中合适的操控的前提下,能够提供特别好地可控制的线控系统。
12.如果在线控转向系统运行期间在转向输入设备的当前位置与转向装置的、转向执行器装置的和/或至少一个可转向车轮的当前位置之间出现同步偏差,则根据本发明构造的线控转向系统实现校正该同步偏差,在一些情况中甚至能够完全(重新)补偿所产生的同步偏差,尤其是在线控转向系统运行期间。由此在许多情况中可以避免线控转向系统的断开或紧急运行,这对可以由此明显改善的可用性有利地起作用。
[0013]“同步偏差”在本发明的意义中尤其理解为在转向输入设备的位置与转向装置的、转向执行器装置的和/或至少一个可转向车轮的位置之间的分别相对于相应存在的运动行程的相对偏差。
[0014]
当转向装置、尤其是转向执行器装置和/或至少一个可转向车轮在从初始位置、例如直线位置出发的转向输入的情况中不能跟随转向运动并且因此不能跟随转向输入设备的位置并且因此转向输入设备在转向输入期间例如走过可能的转向输入行程的50%(然而可转向的轮错误地仅走过45%而不是期望的50%)时,在根据本发明的线控转向系统的运行期间例如可能产生转向输入设备的当前位置与转向装置的当前位置之间的同步偏差。如果现在接下来施加转向输入(其中所述转向输入设备在50%的可用转向输入行程上再次在相反方向上移动)并且可转向车轮这次可以跟随,则这导致车轮转向运动超过初始位置,而在第二转向输入之后,转向输入设备再次处于初始位置中。同步偏差尤其通过所谓的方向盘偏斜来显示,也就是说,当可转向车轮处于直线位置中时,在转向输入设备的“偏斜”的位
置中。
[0015]
同样,同步偏差可以例如在反馈执行器装置失效并且改变到故障状态时出现,并且驾驶员随后进行不合适的且过强的转向输入,这尤其是由于反馈执行器装置的突然失效和转向输入设备上的由此突然的转向转矩下降而引起,然而这种不合适的剧烈的转向输入仅被减弱,即仅利用相对于在这种转向输入中实际要实施的车轮转向角减小的车轮转向角来实现,并且因此转向输入设备相对于可用的转向输入行程处于与可转向车轮相对于总的可用车轮偏转角的不同位置上。
[0016]
在此,根据本发明的线控转向系统原则上不仅可以构造用于单轮辙机动车而且可以构造用于双轮辙机动车。根据车辆应该设置转向系统的原因,选择相应合适的转向装置。
[0017]
在此,根据本发明的线控转向系统原则上不仅可以构造成具有机械备用模式,而且可以构造成不具有机械备用模式,其中,机械备用模式,如果存在的话,优选能够实现转向输入设备与转向装置的完全的机械脱耦,例如借助于相应合适的耦联部。
[0018]
根据本发明的线控转向系统的转向输入设备可以以不同的方式构造并且例如具有或者是方向盘、操纵杆,或者也包括一个或多个转向喇叭或类似物。转向输入设备应当仅适用于驾驶员的转向输入,其中,在此,在本发明的意义中,转向输入优选理解为由驾驶员借助于转向输入设备、尤其通过转向输入设备的相应运动施加转向要求。
[0019]
在此,根据本发明的线控转向系统的反馈执行器装置尤其是构造成,尤其根据所施加的转向输入和/或当前的行驶状态在转向输入设备上产生阻力力矩和/或复位力矩。由此,尤其是在线控转向系统的无故障状态中,可以实现、尤其调节特别有利的转向复位,并且因此可以实现特别舒适的转向感觉。
[0020]
在本发明的意义上的行驶状态尤其在以下车辆状态或表征性的行驶机动中,所述行驶状态或行驶机动优选通过一个或多个行驶状态参量,例如车辆速度、纵向加速度、横向加速度和/或垂直加速度、偏航角和/或偏航率、俯仰角和/或俯仰率、侧倾角和/或侧倾率和/或侧滑角可表征,例如直线行驶、转弯行驶、漂移、制动机动、避让机动、加速过程、泊车机动或掉头机动,其中,在此,还可以进一步具体化上述行驶状态和/或行驶机动中的一个或多个,例如通过在此出现的车辆速度的表征。因此,直线行驶例如可以被具体化成在高速、中速或低速或停车速度中的直线行驶,其中,高速例如可以是大于150km/h的车辆速度v
x
,对于中速优选80km/h≤v
x
≤150km/h成立,对于低速优选25km/h≤v
x
<80km/h并且对于停车速度尤其v
x
<25km/h成立。
[0021]
根据本发明的线控转向系统的转向装置尤其是可以包括转向传动机构和/或拉杆以及必要时另外的传递元件,例如另外的连杆、传动机构部件或类似物。
[0022]
为了求取转向输入设备的位置,根据本发明的线控转向系统还优选地具有用于求取转向输入设备的位置求取装置,例如绝对输出的转向角传感器,尤其是当转向输入设备是方向盘时。
[0023]
为了求取转向执行器装置的位置,根据本发明的线控转向系统还优选具有位置求取装置,以用于求取转向装置的、转向执行器装置的和/或尤其是与转向装置在车辆中的符合功能的装入状态中连接的至少一个可转向车轮的位置。在具有齿条式转向机构的转向装置中,转向装置的位置求取例如可以借助于用于求取齿条位置的位置求取装置来进行。转向执行器装置的位置求取能够例如借助于用于求取所属的转向执行器的转子位置角度的
位置求取装置来进行。可转向车轮的位置求取例如可以借助基于单轮辙模型的计算来进行,尤其是根据借助转向传动机构侧的转向轴上的绝对输出的转向角传感器所检测的转向角。
[0024]
本发明意义上的反馈监控装置理解为一种如下装置,其具有至少一个用于监控、尤其识别反馈执行器装置在至少一个运行状态中的至少一个状态的功能。同步监控装置相应地是一种如下装置,其具有至少一个用于监控、尤其用于确定在转向输入设备的当前位置与转向装置的、转向执行器装置的和/或至少一个可转向车轮的当前位置之间的当前同步偏差的功能。
[0025]
根据本发明的线控转向系统的反馈监控装置和/或同步监控装置在此可以分别单独地构造,例如构造为单独的控制器备,但或者备选地也尤其共同地或者也仅其中的一个集成到控制装置中或者另外的控制装置或另外的部件中。在一些情况中尤其有利的是,反馈监控装置例如被集成到反馈执行器装置中和/或同步监控装置被集成到转向执行器装置中。反馈监控装置和/或同步监控装置也可以分别分布到多个控制装置、尤其是多个控制器和/或部件上。
[0026]
本发明意义上的控制装置尤其是用于至少部分或完全控制至少一个部件、尤其用于至少部分或完全控制根据本发明的线控转向系统的部件的装置,其中,所述控制装置具有至少一个用于至少部分地或完全地控制至少一个部件的功能。在此,根据本发明的线控转向系统的控制装置可以单独地构造,例如构造为单独的控制器,但或者备选地与一个或多个其他的监控和/或控制装置集成在共同的控制器中,例如集成在中央的底盘控制器中。控制装置的各个功能和/或部件、尤其各个硬件部件也可以分布在多个控制装置上,尤其是分布在多个控制器上。
[0027]
根据本发明的线控转向系统优选一方面构造和设置成,根据驾驶员的转向输入来求取相应的转向要求。
[0028]
特别优选地,根据本发明的线控转向系统此外独立地、也就是说独立于驾驶员的转向输入、也就是说尤其不依赖于驾驶员的转向输入、尤其根据本发明的线控转向系统的控制装置而构造和设置成求取、尤其自动求取转向要求。但是,转向要求也可以由其他控制装置接收。这能够以特别简单的方式提供线控转向系统,该线控转向系统能够实现自主行驶。
[0029]
特别优选地,根据本发明的线控转向系统、尤其控制装置还构造成检测在行驶模式方面的驾驶员期望,其中,驾驶员尤其能够在手动的线控运行模式和自主的线控运行模式之间进行选择,其中,所述控制装置尤其构造和设置成,根据所检测的驾驶员期望相应地操控所述转向执行器装置和/或所述反馈执行器装置。由此可以提供特别用户友好的线控转向系统。
[0030]
在根据本发明的线控转向系统的特别优选的设计方案中,转向系统尤其构造成,在自主的线控运行模式中使转向输入设备缩回,尤其在仪表板中的仪表盘或类似物优选地下沉,例如借助伸缩杆或类似物,并且在手动的线控运行模式中相应地移出直至转向位置。由此可以提供特别用户友好的线控转向系统。
[0031]
为了避免转向输入设备在自主的线控运行模式中的一起运动、尤其是一起旋转,在根据本发明的线控转向系统中尤其是可引起转向输入设备的锁定,其中,优选地,转向输
入设备可以被锁定。由此可以提供特别用户友好的线控转向系统。
[0032]
在根据本发明的线控转向系统的有利的设计方案中,控制装置还构造和设置成,在至少一个运行状态中根据行驶状态、优选地根据当前的行驶状态尤其附加地操控转向执行器装置。由此可以提供特别有利的线控转向系统,尤其是特别好地可控制的线控转向系统。
[0033]
为此,线控转向系统优选还具有行驶状态识别装置,该行驶状态识别装置尤其构造和设置成检测和/或确定至少一个行驶状态参量,优选至少一个车辆速度、横向加速度、纵向加速度、偏航率和/或侧滑角,其中,所述行驶状态识别装置尤其还构造和设置成,根据至少一个所检测的或确定的行驶状态参量识别行驶状态。此外,在一些情况中有利的和/或需要的是,还检测另外的行驶状态参量,例如偏航角和/或偏航率、俯仰角和/或俯仰率、侧倾角和/或侧倾率。这使得能够根据行驶状态特别有利地操控转向执行器装置。
[0034]
特别优选地,根据本发明的线控系统、尤其是行驶状态识别部在此构造和设置成,还产生并且优选输出至少一个表征所识别的行驶状态的行驶状态信号,尤其输出给控制装置,所述控制装置优选构造用于接收和/或进一步处理所述至少一个行驶状态信号。这使得能够根据行驶状态特别简单地操控转向执行器装置。
[0035]
特别优选地,控制装置构造和设置成,在至少一个运行状态中,根据转向输入以及根据反馈执行器装置的状态并且根据行驶状态、尤其根据至少一个行驶状态信号来操控转向执行器装置,和/或在至少一个运行状态中,至少根据转向输入以及根据同步偏差并且根据行驶状态、尤其根据至少一个行驶状态信号来操控转向执行器装置。
[0036]
在根据本发明的线控转向系统的另外的有利的设计方案中,控制装置尤其是构造和设置成,在线控转向系统的至少一个运行状态中,根据所施加的转向输入和至少一个所求取的校正参量、尤其根据转向输入校正参量和/或行驶状态校正参量和/或同步偏差校正参量来操控转向执行器装置,以便优选根据线控转向系统的状态、尤其根据反馈执行器装置的尤其是当前的状态、尤其当前的行驶状态和/或尤其是当前的同步偏差来校正实际要实施的限定的车轮转向运动。借助于校正参量,可以以特别简单的方式进行对转向执行器装置的操控的适配、尤其是校正,以便引起合适的、尤其是对于相应的情况合适的、尤其是在相应的情况中更好适配的较合适的车轮转向运动。
[0037]
在此,每个校正参量尤其可以是减小参量,也就是说具有减小实际操控的作用,或者是放大参量,并且具有增强实际操控的作用,或者在一些情况中也可以具有中性的作用,也就是说,结果被求取成,使得结果既不得到实际、原始的、未校正的操控的减小的作用也不得到增强的作用。
[0038]
在此,每个校正参量要么例如是线性偏移、线性或非线性的因子、函数或综合特性曲线或者其组合,其中,一个或多个校正参量特别优选地至少对于一个运行状态和/或至少一个行驶状态可以根据一个或多个可数据处理的和/或可应用的可分别存储的参数求取。由此,能够以简单的方式实现对转向执行器装置的操控的良好适配。
[0039]
在根据本发明的线控转向系统的另外的有利的设计方案中,控制装置尤其是构造和设置成确定至少一个转向输入校正参量,优选至少部分地根据转向输入行程、转向输入速度和/或转向输入加速度来确定。由此可以实现转向执行器装置的操控的特别好的适配或校正。尤其借助于转向输入速度和/或转向输入加速度可以实现良好的适配/校正并且因
此实现良好的接近实际驾驶员期望的操控,因为转向输入速度和/或转向输入加速度是良好的度量,尤其是与反馈执行器装置的精确的故障状态出现时间点相结合,尤其是在反馈执行器装置失效的情况中,例如在反馈执行器装置出现故障状态之后忽然地和突然地进行转向输入,其中,尤其在出现故障状态之前和在出现反馈执行器装置的故障状态时和/或紧接在出现故障状态之后在这些参量中的大的差异的情况中,在出现故障状态之后进行的转向输入以高的概率具有大的不期望的部分,从而在该情况中优选进行强烈的校正,而在这些参量中仅有小的差异的情况中尤其可以从转向输入的仅小的不期望的份额出发,所述份额仅需要小的校正。
[0040]
在本发明的意义上,“转向输入行程”在此理解为转向输入设备的分别在转向输入时走过的运动行程,其中,转向输入行程在此原则上与相应的转向输入设备的类型和设计方案有关并且例如可以是例如在可旋转地支承的转向输入设备、如方向盘或类似物中的转向角。相反,在作为转向输入设备的滑块中,转向输入行程优选是直线段。
[0041]
相应地,“转向输入速度”被理解为转向输入行程随时间的变化,即,转向输入行程相对于时间的一阶导数。
[0042]
相应地,“转向输入加速度”被理解为转向输入速度随时间的变化,即,转向输入行程相对于时间的二阶导数。
[0043]
在根据本发明的线控转向系统的另外的有利的设计方案中,控制装置尤其构造和设置成,至少部分地或完全地根据在出现反馈执行器装置的故障状态之前进行的和所检测的转向输入和/或至少部分地或完全地根据在反馈执行器装置的故障状态期间所进行和所检测的转向输入来确定至少一个转向输入校正参量。由此可以实现转向执行器装置的操控的特别好的适配或校正,并且尽管存在可能不合适的、不符合实际驾驶员期望的转向输入,也引起尽可能合适的、符合实际驾驶员期望的车轮转向运动。尤其以这种方式可以在许多情况中良好地推断出实际期望的转向输入,该转向输入特别优选地可以作为确定至少一个转向输入校正参量的基础。
[0044]
在根据本发明的线控转向系统的另外的有利的设计方案中,控制装置优选构造和设置成,优选至少部分地或完全地根据至少一个检测的行驶状态参量,尤其是根据车辆速度、横向加速度、纵向加速度、偏航率和/或侧滑角来确定至少一个行驶状态校正参量。此外,在一些情况中有利的和/或需要的是,还检测另外的行驶状态参量,例如偏航角和/或偏航率、俯仰角和/或俯仰率、侧倾角和/或侧倾率。这使得能够根据行驶状态特别有利地校正地操控转向执行器装置。
[0045]
在根据本发明的线控转向系统的另外的有利的设计方案中,控制装置尤其构造和设置成,至少部分地或完全地根据在出现反馈执行器装置的故障状态之前检测的行驶状态和/或至少部分地或完全地根据在反馈执行器装置的故障状态期间检测的行驶状态来确定至少一个行驶状态校正参量。由此能够实现转向执行器装置的操控的特别好的适配或校正。
[0046]
在根据本发明的线控转向系统的另外的有利的设计方案中,控制装置优选还构造和设置成,尤其至少部分地根据同步偏差的大小、转向输入设备的绝对位置和/或转向装置的、转向执行器装置的和/或至少一个可转向车轮的绝对位置来确定至少一个偏差校正参量。由此可以以特别简单和有利的方式实现快速且与情况适配的同步。
[0047]
特别优选地,根据本发明的线控转向系统的控制装置在此构造和设置成,在反馈执行器装置的至少一个无故障的状态中将转向执行器装置操控成,使得响应于在反馈执行器装置的无故障的状态中进行的转向输入,引起未校正的、预限定的车轮转向运动。如果所属的校正参量在此是一个因子,那么校正因子在此优选等于1,在偏移的情况中优选等于0。
[0048]
在根据本发明的线控转向系统的另外的有利的设计方案中,控制装置尤其构造和设置成,在反馈执行器装置的至少一个故障状态中,尤其根据至少一个转向输入校正参量和/或至少一个行驶状态校正参量将转向执行器装置操控成,使得根据在反馈执行器装置的故障状态中进行的转向输入来引起被校正的车轮转向运动,尤其是减小的车轮转向运动或不引起车轮转向运动。这已经被证明是特别有利的,因为在大多数情况中,当出现反馈执行器装置的故障状态时,尤其是在失效的情况中,当转向力矩突然下降时,会发生“过度转向”,这由此可以被减少或者在一些情况中甚至可以完全避免。
[0049]
在此,“减小的车轮转向运动”当前理解为这样的车轮转向运动,该车轮转向运动与在反馈执行器装置的无故障状态中根据所进行的转向输入实际要实施的限定的车轮转向运动相比更小、尤其是限定地更小、优选地以校正参量更小。如果所属的校正参量在此是一个因子,那么校正因子在此优选小于1,在偏移的情况中优选小于0。
[0050]
如果不引起车轮转向运动,则抑制车轮转向运动,也就是说,转向执行器装置尤其被操控成使得不引起车轮转向运动。
[0051]
特别优选地,转向执行器装置在此可以根据至少一个转向输入校正参量和/或至少一个行驶状态校正参量来操控,其中,所述至少一个转向输入校正参量和/或所述至少一个行驶状态校正参量尤其被选择成,使得根据在反馈执行器装置的故障状态中进行的转向输入来引起所期望的校正的车轮转向运动。
[0052]
通过与行驶状态相关的校正,可以以简单的方式实现转向执行器装置的与行驶情况相关的操控,尤其是在反馈执行器装置的故障状态中并且因此是较有针对性的和较可靠的操控。由此例如可以降低或者甚至完全避免的危险是,在特定的情况中(例如在转弯行驶时)过度抑制或者不期望地高地实施转向输入和由此驾驶员期望,这例如在弯曲的乡村道路上动态行驶时可能是危险的。
[0053]
在根据本发明的线控转向系统的另外的有利的设计方案中,控制装置尤其是构造和设置成,在反馈执行器装置的无故障的状态中、尤其仅在反馈执行器装置的无故障的状态中,根据转向输入以及根据同步偏差和/或偏差校正参量来操控转向执行器装置。由此可以实现快速的“再同步”并且由此实现根据本发明的线控转向系统的更高的无故障的可用性。
[0054]
在根据本发明的线控转向系统的另外的有利的设计方案中,控制装置优选构造和设置成,根据同步偏差和/或偏差校正参量将所述转向执行器装置操控成,使得根据在存在同步偏差时在反馈执行器装置的无故障状态中所进行的转向输入,引起相对于限定的车轮转向运动被校正的车轮转向运动,所述限定的车轮转向运动在反馈执行器装置的无故障状态中在没有同步偏差的情况下根据所进行的转向输入实际要实施,尤其是引起导致同步偏差减小的被校正的车轮转向运动。由此,能够实现转向执行器装置的特别简单且有利的操控。
[0055]
优选地,转向执行器装置在此可以根据至少一个偏差校正参量来操控,其中,所述
偏差校正参量特别优选地被选择成,使得根据在所述反馈执行器装置的无故障状态中进行的转向输入引起期望的减小偏差的被校正的车轮转向运动。
[0056]
在根据本发明的线控转向系统的另外的有利的设计方案中,控制装置优选构造和设置成,根据同步偏差和/或偏差校正参量来操控转向执行器装置,使得引起被校正的车轮转向运动,该车轮转向运动导致在到达转向输入设备的参考位置时、尤其在到达转向输入设备的直线行驶位置时,同步偏差被补偿,其中,所述偏差校正参量优选被选择成,使得根据在所述反馈执行器装置的无故障状态中进行的转向输入引起期望的补偿偏差的被校正的车轮转向运动。
[0057]
在根据本发明的线控转向系统的另外的有利的设计方案中,线控转向系统特别优选地构造成,使得用于减小同步偏差的车轮转向运动仅在由驾驶员施加的转向输入期间或紧接在该转向输入之后是可引起的。这意味着,优选地,原则上仅在转向输入期间才可引起车轮转向运动。由此可以避免“自转向”的感觉,由此可以在驾驶员中产生高安全感并且可以实现线控转向系统的高接受度。
[0058]
在根据本发明的线控转向系统的另外的有利的设计方案中,线控转向系统还尤其构造成,使得用于减小同步偏差的车轮转向运动仅在与由驾驶员施加的转向输入相同的方向上是可引起的。这意味着,优选地,原则上仅可以同向地进行车轮转向运动。由此可以避免与转向输入相反得到的刺激性的车辆反应和/或“自转向”的感觉,由此可以在驾驶员中产生高安全感并且可以实现线控转向系统的高接受度。
[0059]
一种用于运行符合功能地装入在车辆中的根据本发明的线控转向系统的根据本发明的方法,其中,至少一个可转向车轮与所述转向装置的转向执行器装置连接,其特征在于如下步骤:
[0060]-尤其是借助反馈执行器监控装置检查反馈执行器装置的状态,并且
[0061]-根据转向输入以及根据反馈执行器装置的状态尤其借助于控制装置来操控转向执行器装置。
[0062]
在根据本发明的方法的有利的实施方案中,优选的是,当已经识别到反馈执行器装置的故障状态时,尤其借助控制装置优选将转向执行器装置操控成,使得引起被校正的车轮转向运动,尤其是减小的车轮转向运动或不引起车轮转向运动,其中,为此优选还根据至少一个转向输入校正参量和/或行驶状态校正参量来操控所述转向执行器装置。这已经被证明是特别有利的,因为在大多数情况中,当出现反馈执行器装置的故障状态时,尤其是在失效的情况中,当转向力矩突然下降时,会发生“过度转向”,这由此可以被减少或者在一些情况中甚至可以完全避免。在一些情况中,备选地,但是增强的车轮转向运动也可以是有利的。
[0063]
在根据本发明的方法的另外的有利的实施方案中,优选的是,当已经识别出反馈执行器装置的无故障状态时,尤其借助同步监控装置、尤其是另外的步骤中确定在转向输入设备的当前位置与转向执行器装置的和/或至少一个可转向车轮的当前位置之间的同步偏差,并且如果存在同步偏差,则还根据由同步监控装置求取的同步偏差、优选根据同步偏差和偏差校正参量来操控转向执行器装置。
[0064]
在此,优选地,尤其在反馈执行器装置的无故障状态中,尤其仅在反馈执行器装置的无故障状态中,根据转向输入以及根据同步偏差和/或偏差校正参量来操控转向执行器
装置。由此可以实现快速的“再同步”并且由此实现根据本发明的线控转向系统的更高的无故障的可用性。
[0065]
特别优选地,转向执行器装置在此根据同步偏差和/或偏差校正参量被操控成,使得根据在反馈执行器装置的无故障状态中在存在同步偏差的情况中进行的转向输入,引起相对于限定的车轮转向运动被校正的车轮转向运动,所述限定的车轮转向运动在反馈执行器装置的无故障状态中在没有同步偏差的情况下根据所进行的转向输入实际要实施,尤其是引起导致减小同步偏差的被校正的车轮转向运动。由此,能够实现转向执行器装置的特别简单且有利的操控。
[0066]
优选地,转向执行器装置在此根据至少一个偏差校正参量来操控,其中,所述偏差校正参量特别优选地被选择成,使得根据在所述反馈执行器装置的无故障状态中进行的转向输入引起期望的减小偏差的被校正的车轮转向运动。
[0067]
优选地,在此根据同步偏差和/或偏差校正参量将转向执行器装置操控成,使得引起被校正的车轮转向运动,该车轮转向运动导致在到达转向输入设备的参考位置时,尤其是在到达转向输入设备的直线行驶位置时,同步偏差被补偿,其中,所述偏差校正参量优选被选择成,使得根据在所述反馈执行器装置的无故障状态中进行的转向输入引起期望的补偿偏差的被校正的车轮转向运动。这能够实现特别用户友好的同步并且小地刺激驾驶员。
[0068]
特别有利的是,用于减小同步偏差的车轮转向运动仅在由驾驶员施加的转向输入期间或紧接在该转向输入之后是可引起的。这优选地原则上仅在转向输入期间引起车轮转向运动。由此可以避免“自转向”的感觉,由此可以在驾驶员中产生高安全感并且可以实现线控转向系统的高接受度。
[0069]
进一步优选地,用于减小同步偏差的车轮转向运动在此尤其是始终仅沿与由驾驶员施加的转向输入相同的方向引起。这意味着,优选地,原则上仅同向地实施车轮转向运动。由此可以避免与转向输入相反得到的刺激性的车辆反应和/或“自转向”的感觉,由此可以在驾驶员中产生高安全感并且可以实现线控转向系统的高接受度。
[0070]
根据本发明的车辆根据本发明尤其可以是机动车并且其特征在于,该车辆具有线控转向系统,该线控转向系统根据本发明来构造和/或该线控转向系统构造用于执行根据本发明的方法。
[0071]
关于根据本发明的线控转向系统所描述的有利的设计方案和其优点相应地也适用于根据本发明的方法以及根据本发明的车辆,并且反之亦然。
[0072]
上述特征和另外的特征不仅从权利要求中并且从说明书中而且从附图中得知,其中,各个特征可以在本发明的实施方式中单独地或多个地以子组合的形式实现,并且可以是有利的以及单独可保护的实施方案,只要这些实施方案在技术上是可能的即可。
附图说明
[0073]
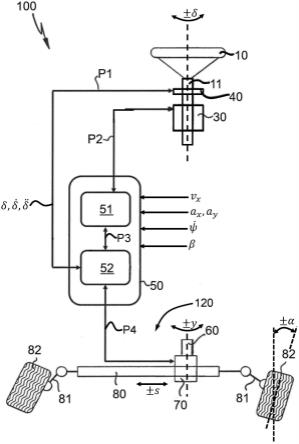
下面借助根据本发明的线控转向系统的优选的、但非限制性的实施例以及借助根据本发明的方法的实施例进一步阐述本发明,其中,本发明为此在附图中被示意地并且部分地非常简化地示出。图1以原理图示出根据本发明的线控转向系统的实施例的基本示意结构。图2示出具有用于根据本发明的方法运行根据本发明的线控转向系统的实施例的各个步骤的流程图。
具体实施方式
[0074]
图1以原理图示例性地示出根据本发明的线控转向系统100的第一实施例的示意结构,该线控转向系统具有转向输入设备10,该转向输入设备在根据本发明的线控转向系统100的该实施例中是方向盘10,该方向盘与驾驶员侧的或者说方向盘侧的转向轴11不可相对旋转地连接,并且通过该方向盘通过相应的运动(在该情况中通过围绕方向盘侧的转向轴11的旋转轴线的旋转)可以施加转向要求、即期望的转向输入,在这种情况中是驾驶员期望的转向输入,在这种情况中是方向盘角δ。
[0075]
此外,根据本发明,线控转向系统100具有反馈执行器装置30、控制装置50以及转向装置120。
[0076]
在根据本发明的线控转向系统100的这个实施例中,可以借助反馈执行器装置30在此在转向输入设备10上产生限定的反馈转向力矩,尤其是阻力转向力矩和/或复位力矩。因此可以向驾驶员产生触觉回馈、尤其是触觉反馈,由此可以实现特别有利的转向感觉,尤其是类似于或类比于传统的机械转向系统的转向感觉。
[0077]
为了产生反馈转向力矩,反馈执行器装置30可以由控制装置50相应地操控,尤其是通过信号和通信路径p2,其中,在根据本发明的线控转向系统100的该实施例中,尤其根据通过方向盘10施加的转向角δ并且根据多个行驶状态参量、例如车辆速度v
x
、纵向加速度和/或横向加速度a
x
或者ay、偏航率和/或侧滑角β能够产生反馈转向力矩。在这种情况中,转向角δ在此可以借助提供绝对输出的转向角传感器40来检测并且经由信号和通信路径p1传送到控制装置50。
[0078]
此外,线控转向系统100根据本发明具有转向装置120,该转向装置在根据本发明的线控转向系统100的该实施例中具有车轮侧的或者说转向传动机构侧的转向轴60,该转向轴在其一个端部(在该情况中为车轮侧的端部)上机械地与转向传动机构80的齿条耦联,该齿条又通过左拉杆81和右拉杆81与车辆的可转向车轮82连接,例如与可转向前轮连接。转向装置120还包括转向执行器装置70,借助于该转向执行器装置尤其根据由控制装置50求取的额定预设可以引起可转向车轮82的转向运动、尤其可转向车轮82的尤其以车轮转向角α进行的枢转运动,该额定预设在该实施例中通过信号路径p4与转向执行器装置70信号连接和通信连接。
[0079]
控制装置50在此尤其构造和设置成,将转向执行器装置70操控成,使得引起所期望的车轮转向运动,其中,在根据本发明的转向系统100的该实施例中,控制装置50在此不仅构造成根据由驾驶员施加的转向输入、尤其根据施加的转向输入行程(在这种情况中是转向角δ)操控转向执行器装置70,而且构造成尤其在没有驾驶员的主动转向的情况中,优选在线控转向系统100的另外的运行模式中、尤其在“自主驾驶模式”中自身求取相应的转向要求,从而利用该线控转向系统100也可以实现高度自动化的或自主的行驶。
[0080]
用于操控转向执行器装置70的额定预设在根据本发明的线控转向系统100的该实施例中在此借助于相应存储的、尤其是可数据处理的和/或可应用的函数、参数和综合特性曲线来求取,该求取尤其是根据由驾驶员施加的转向输入或自动求取的转向要求以及根据所检测的行驶状态或根据一个或多个所检测的行驶状态参量,例如车辆速度v
x
、纵向加速度和/或横向加速度a
x
或ay、偏航率和/或侧滑角β和/或根据一个或多个另外的状态参量。
[0081]
在此,在所施加的转向输入(在该情况中为所施加的转向角δ)与得到的所引起的车轮转向运动α之间的传动比不必是恒定的,而是可以由于在转向输入设备10与可转向车轮82之间缺少机械连接而分别适配于当前的行驶情况,这可以以简单的方式通过相应地操控转向执行器装置70来实现。
[0082]
根据本发明,线控转向系统100还具有用于监控反馈执行器装置30的反馈执行器监控装置51,反馈执行器监控装置构造和设置成识别反馈执行器装置30的至少一个状态,尤其是至少一个故障状态,并且在故障情况中优选将故障信号传送到控制装置50,其中,在该实施例中,反馈执行器监控装置51集成到控制装置50中。备选地,反馈执行器监控装置51例如也可以集成到反馈执行器装置30或其他的在此未示出的控制装置中。
[0083]
控制装置50根据本发明还构造和设置成,在线控转向系统100的至少一个运行状态中,根据转向输入并且根据反馈执行器装置30的状态来操控转向执行器装置70,其中,在该线控转向系统100中,控制装置50构造和设置成,在反馈执行器装置30的故障状态中,根据至少一个转向输入校正参量和至少一个行驶状态校正参量将转向执行器装置70操控成,使得根据在反馈执行器装置30的故障状态中进行的转向输入而引起校正的车轮转向运动,尤其是减小的车轮转向运动或者不引起车轮转向运动。由此,可以以特别简单的方式在出现反馈执行器装置的故障状态时、尤其在失效时当转向力矩突然下降时,减少或者在一些情况中甚至完全补偿或抑制无意的“过度转向”,并且因此避免不期望的并且对于相应的行驶情况不合适的或者可能甚至危险的车辆反应。
[0084]
为了在故障情况中的转向执行器装置的特别有利的操控,控制装置50在这种线控转向系统100中在此构造和设置成,根据所施加的转向角δ、转向角速度以及转向输入加速度来确定至少一个转向输入校正参量,其中,至少一个转向输入校正参量在此分别根据在出现故障状态之前的限定时间上检测的转向角δ、在出现故障状态之前的限定时间上检测的转向角速度和在出现故障状态之前的限定时间上检测的转向角加速度以及分别根据在出现故障状态时或之后在限定时间上检测的转向角δ、在该时间上检测的转向角速度和在该时间上检测的转向角加速度来确定。由此可以引起特别好的与实际期望的转向输入相适配的车轮转向运动。
[0085]
因为在上述线控转向系统100的运行期间可能出现同步偏差,该同步偏差可能对转向系统100的可用性产生不利影响,所以线控转向系统100还具有同步监控装置52,该同步监控装置根据本发明构造和设置成,在线控转向系统100的至少一个运行状态中确定在转向输入设备10的当前位置与转向装置120(在该实施例中为齿条)的以及转向执行器装置70(在该情况中为所属的转向执行器)的当前位置之间的同步偏差,并且根据由同步监控装置52求取的同步偏差来操控转向执行器装置70。
[0086]
为了确定转向装置的和转向执行器装置的位置,根据本发明的线控转向系统100的该实施例还分别具有相应的在此未示出的位置求取装置,尤其是用于求取齿条的绝对位置s和用于求取转向执行器的转子位置、尤其是转子位置角y的位置求取装置。
[0087]
同步监控装置52在该实施例中同样集成到控制装置50中,其中,两个监控装置51和52在此也通过信号路径p3彼此信号连接和通信连接。但是,同步监控装置52也可以备选地例如集成到转向执行器装置70或在这里未示出的其他控制装置中。
[0088]
当前,控制装置50构造和设置成,根据同步偏差以及偏差校正参量来操控转向执行器装置70,尤其是操控成,使得根据在存在同步偏差的情况中在反馈执行器装置30的无故障的状态中进行的转向输入来引起被校正的车轮转向运动,该车轮转向运动导致同步偏差的减小,尤其是使得在到达转向输入设备10的参考位置时,尤其在(重新)达到转向输入设备10的直线行驶位置时,同步偏差被补偿。
[0089]
为了避免驾驶员的刺激、尤其是自转向的感觉,在这种线控转向系统100中,用于减小同步偏差的车轮转向运动在此仅在由驾驶员施加的转向输入期间或者紧接在该转向输入之后被引起并且仅与转向输入同向、也就是说仅沿相同的方向。
[0090]
图2示出用于运行根据本发明的线控转向系统100的方法的第一实施例的具有各个步骤s0、s1和s2的流程图,其中,根据本发明的方法的这个实施例在开始s0之后具有第一步骤s1和第二步骤s2,在第一步骤中检测转向输入,在第二步骤中检测行驶状态,其中,步骤s1和s2也可以同时或以相反的顺序执行和/或也可以在下一步骤s3之后执行,在该下一步骤中根据本发明检查反馈执行器装置30的状态,尤其是否存在故障状态。
[0091]
如果存在故障状态(“ ”),也就是说在步骤s3中识别出反馈执行器装置30的故障状态,尤其是失效,则在另外的步骤s5a中,尤其根据转向输入行程、转向输入速度和转向输入加速度,也就是说,在此尤其是根据所施加的转向角δ、转向角速度以及转向输入加速度确定至少一个校正参量,尤其是至少一个转向输入校正参量,以及尤其根据所检测的行驶状态参量,当前尤其根据车辆速度v
x
、纵向和/或横向加速度a
x
或者ay、偏航率和/或侧滑角β,确定至少一个行驶状态校正参量,并且在另外的步骤s6a中尤其根据所施加的转向输入、当前的行驶状态和所求取的校正参量相应地操控转向执行器装置70,然后在步骤s7中结束该方法。在此,所述(一个或多个)校正参量确定成,使得所引起的车轮转向运动导致适合于所述情况的车辆反应,尤其导致尽可能接近驾驶员所期望的实际车辆反应。
[0092]
如果不存在故障状态(
“‑”
),即在步骤s3中识别出反馈执行器装置30的无故障的状态,那么在步骤s4中检查是否存在同步偏差。如果是(“ ”),则在下一步骤s5b中确定至少一个校正参量、尤其是至少一个偏差校正参量,并且在另外的步骤s6b中尤其根据所施加的转向输入、当前的行驶状态和所求取的校正参量相应地操控转向执行器装置70,然后在步骤s7中结束该方法。
[0093]
在此,所述(一个或多个)偏差校正参量确定成,使得根据在存在同步偏差时在反馈执行器装置30的无故障状态中进行的转向输入引起被校正的车轮转向运动,该车轮转向运动导致同步偏差的减小,尤其是使得在达到转向输入设备10的参考位置时、尤其在(重新)达到转向输入设备10的直线行驶位置时,同步偏差被补偿。
[0094]
为了避免驾驶员的刺激、尤其是自转向的感觉,用于减小同步偏差的车轮转向运动在此仅在由驾驶员施加的转向输入期间或者紧接在该转向输入之后被触发并且仅与转向输入同向、也就是说仅沿相同的方向。
[0095]
如果在步骤s4中确定不存在同步偏差(
“‑”
),则不确定偏差校正参量并且将转向执行器装置70操控成,使得引起实际要实施的车轮转向运动。
[0096]
备选地,也可以确定中性的偏差校正参量,也就是说如下偏差校正参量,该偏差校正参量既不会导致实际要实施的车轮转向运动的减小也不会导致实际要实施的车轮转向
运动的增强,也就是说例如是1的校正因子。
[0097]
步骤s1至s7在此可以任意多次地重复。
[0098]
当然,在不脱离权利要求的内容的情况下,可以对所阐述的实施例进行多种修改,尤其是结构修改。
[0099]
附图标记列表
[0100]
100
ꢀꢀꢀꢀꢀꢀ
根据本发明的线控转向系统的实施例
[0101]
10
ꢀꢀꢀꢀꢀꢀꢀ
转向输入设备,方向盘
[0102]
11
ꢀꢀꢀꢀꢀꢀꢀ
方向盘侧的转向轴
[0103]
30
ꢀꢀꢀꢀꢀꢀꢀ
反馈执行器装置
[0104]
40
ꢀꢀꢀꢀꢀꢀꢀ
转向角传感器
[0105]
50
ꢀꢀꢀꢀꢀꢀꢀ
控制装置
[0106]
51
ꢀꢀꢀꢀꢀꢀꢀ
反馈执行器监控装置
[0107]
52
ꢀꢀꢀꢀꢀꢀꢀ
同步监控装置
[0108]
60
ꢀꢀꢀꢀꢀꢀꢀ
转向传动机构侧的转向轴
[0109]
70
ꢀꢀꢀꢀꢀꢀꢀ
转向执行器装置
[0110]
80
ꢀꢀꢀꢀꢀꢀꢀ
转向传动机构
[0111]
81
ꢀꢀꢀꢀꢀꢀꢀ
拉杆
[0112]
82
ꢀꢀꢀꢀꢀꢀꢀ
可转向车轮
[0113]
120
ꢀꢀꢀꢀꢀꢀ
转向装置
[0114]ax
ꢀꢀꢀꢀꢀꢀꢀ
纵向加速度
[0115]ay
ꢀꢀꢀꢀꢀꢀꢀ
横向加速度
[0116]
α
ꢀꢀꢀꢀꢀꢀꢀ
车轮转向角
[0117]
β
ꢀꢀꢀꢀꢀꢀꢀ
侧滑角
[0118]
δ
ꢀꢀꢀꢀꢀꢀꢀ
转向输入设备上的转向角
[0119]
ꢀꢀꢀꢀꢀꢀꢀ
转向输入设备上的转向角速度
[0120]
ꢀꢀꢀꢀꢀꢀꢀ
转向输入设备上的转向角加速度
[0121]
ꢀꢀꢀꢀꢀꢀ
偏航率
[0122]
p1...p4
ꢀꢀ
信号路径
[0123]sꢀꢀꢀꢀꢀꢀꢀꢀ
齿条位置
[0124]
s0...s7
ꢀꢀ
方法步骤
[0125]vx
ꢀꢀꢀꢀꢀꢀꢀ
车辆速度
[0126]yꢀꢀꢀꢀꢀꢀꢀꢀ
转向执行器位置
[0127]
ꢀꢀꢀꢀꢀꢀꢀꢀ“
是”[0128]
‑ꢀꢀꢀꢀꢀꢀꢀꢀ“
否”。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。