1.本发明涉及马达控制装置、马达控制方法、混合动力系统、升压变换器系统以及电动助力转向系统。
背景技术:
2.永磁铁同步马达不需要电刷和换向器等机械性的电流整流机构,易于维护且小型轻量、效率和功率因数都较高,所以广泛普及到了电动汽车的驱动、发电等用途。永磁铁同步马达通常由定子和转子构成,所述定子由电枢线圈等构成,所述转子由永磁铁和铁心等构成。利用逆变器将从电池等直流电源供给的直流电压转换为交流电压并将交流电流流至永磁铁同步马达的电枢线圈,由此产生电枢磁通。借助因该电枢磁通与永磁铁的磁铁磁通之间产生的吸引力和斥力而产生的磁铁转矩、为使透过转子的电枢磁通的磁阻最小化而产生的磁阻转矩来驱动永磁铁同步马达。
3.永磁铁同步马达中,在马达的旋转方向(周向)和与马达的转轴垂直的方向(径向)上分别产生电枢磁通和磁铁磁通所引起的电磁力。上述转矩是将周向的电磁力积分得到的,其中包含马达的磁路结构所引起的转矩的波动(转矩脉动)。另一方面,马达的径向上产生的电磁力作为使马达的定子和外壳发生变形、振动的激振力(电磁激振力)发挥作用。
4.马达的低转速时,其他的振动和噪音因素少,所以转矩脉动所引起的振动和噪音变得明显。尤其是在电动汽车、混合动力汽车之类的使用永磁铁同步马达的环保型汽车中,在低转速时存在因马达的转子和轮胎这两个惯性系而产生车体共振、导致振动和噪音变得明显的情况。另一方面,在低转速时除外的马达的转速区域内,径向的电磁力(电磁激振力)与周向的电磁力(转矩脉动)相比达到5~10倍左右的大小。因此,电磁激振力造成的振动和噪音占主导。
5.另外,流至马达的交流电流中包含用于马达的驱动控制、根据马达的转速而频率发生变换的正弦波等基波电流分量和逆变器的开关动作带来的高次谐波电流分量。高次谐波电流的频率由基波电流的频率和pwm调制中使用的载波的频率决定。因此,某些马达转速下,存在因基波电流而在马达中产生的电磁激振力或转矩脉动与因高次谐波电流而在马达中产生的电磁激振力或转矩脉动重叠而产生大的振动和噪音的情况。
6.作为本技术发明的关联技术,已知有专利文献1记载的技术。专利文献1中揭示了一种方法,即,包含与永磁铁马达的转速相应的基波电流和开关动作带来的高次谐波电流,在规定的马达转速下以避免因基波电流而在马达中周期性地产生的激振力的相位即第1相位与因高次谐波电流而在马达中周期性地产生的激振力的相位即第2相位相互重叠的方式控制第2相位。现有技术文献专利文献
7.专利文献1:国际公开第2018/139295号
技术实现要素:
发明要解决的问题
8.如前文所述,在马达的低转速时,其他振动和噪音因素少,所以转矩脉动所引起的振动和噪音变得明显。另一方面,在低转速时除外的马达的转速区域内,电磁激振力造成的振动和噪音占主导。如此,在电动汽车、混合动力汽车之类的使用永磁铁同步马达的环保型汽车中,在大范围的转速内振动和噪音成为问题。然而,专利文献1揭示的方法无法在大范围的转速内有效改善这样的问题。
9.本发明是鉴于上述问题而成,其目的在于有效地抑制永磁铁同步马达中产生的振动和噪音。解决问题的技术手段
10.本发明的马达控制装置对交流马达的驱动进行控制,所述交流马达与进行直流电向交流电的功率变换的功率变换器连接而使用所述交流电进行驱动,该马达控制装置具备:载波生成部,其生成载波;载波频率调整部,其调整所述载波的频率;以及栅极信号生成部,其使用所述载波对与转矩指令相应的电压指令进行脉宽调制,生成用于控制所述功率变换器的动作的栅极信号;所述载波频率调整部根据所述转矩指令和所述交流马达的转速、以改变所述电压指令与所述载波的相位差的方式调整所述载波的频率。本发明的马达控制方法对交流马达的驱动进行控制,所述交流马达与进行直流电向交流电的功率变换的功率变换器连接而使用所述交流电进行驱动,该马达控制方法根据对所述交流马达的转矩指令和所述交流马达的转速、以改变与所述转矩指令相应的电压指令与载波的相位差的方式调整所述载波的频率,以所述调整后的频率来生成所述载波,并使用所述载波对所述电压指令进行脉宽调制,生成用于控制所述功率变换器的动作的栅极信号。本发明的混合动力系统具备:所述马达控制装置;功率变换器,其根据从所述马达控制装置输出的所述栅极信号进行动作,进行直流电向交流电的功率变换;交流马达,其使用所述交流电进行驱动;以及发动机系统,其连接于所述交流马达。本发明的升压变换器系统具备:所述马达控制装置;升压变换器,其连接于直流电源,根据所述马达控制装置的控制来生成将所述直流电源升压得到的直流电;以及功率变换器,其根据从所述马达控制装置输出的所述栅极信号进行动作,进行经所述升压变换器升压后的所述直流电向交流电的功率变换。本发明的电动助力转向系统具备:所述马达控制装置;多个功率变换器,它们根据从所述马达控制装置输出的所述栅极信号进行动作,分别进行直流电向交流电的功率变换;以及交流马达,其具有多个绕组系统,通过由所述多个功率变换器分别生成的交流电分别流至所述多个绕组系统来进行驱动;使用所述交流马达来控制车辆的转向。发明的效果
11.根据本发明,能够有效地抑制永磁铁同步马达中产生的振动和噪音。
附图说明
12.图1为配备有本发明的一实施方式的马达控制装置的马达驱动系统的整体构成图。
图2为表示本发明的第1实施方式的马达控制装置的功能构成的框图。图3为表示本发明的第1实施方式的载波频率调整部的功能构成的框图。图4为表示载波频率固定时的声音和振动的频谱强度的实测数据的一例的图。图5为表示本发明的第1实施方式的电压相位误差运算部的功能构成的框图。图6为基准电压相位运算的概念图。图7为表示马达中产生的每一频率的电磁激振力和转矩脉动带来的噪音电平的一例的图。图8为表示针对每一转速ωr的基准电压相位θvb的、转矩脉动和电磁激振力相对于基准电压相位θvb的相位差数据例的图。图9为表示针对每一调制率h的基准电压相位θvb的、转矩脉动和电磁激振力相对于基准电压相位θvb的相位差数据例的图。图10为表示本发明得到的电磁激振力的减少效果的图。图11为表示本发明得到的转矩脉动的减少效果的图。图12为表示本发明的第2实施方式的混合动力系统的构成的图。图13为表示本发明的第3实施方式的升压变换器系统的构成的图。图14为表示本发明的第4实施方式的电动助力转向系统的构成的图。图15为表示本发明的第4实施方式的电动助力转向系统中的驱动控制系统的构成的图。
具体实施方式
13.下面,一边参考附图,一边对本发明的具体实施方式进行详细说明。在本实施方式中,对在搭载于电动汽车或混合动力汽车中加以使用的马达驱动系统中的运用例进行说明。
14.(第1实施方式)图1为配备有本发明的一实施方式的马达控制装置的马达驱动系统的整体构成图。图1中,马达驱动系统100具备马达控制装置1、永磁铁同步马达(以下简称为“马达”)2、逆变器3、旋转位置检测器41、高压电池5。
15.马达控制装置1根据与车辆对马达2要求的目标转矩相应的转矩指令t*来生成用于控制马达2的驱动的栅极信号,并输出至逆变器3。再者,马达控制装置1的详情在后文中进行说明。
16.逆变器3具有逆变电路31、pwm信号驱动电路32以及平滑电容器33。pwm信号驱动电路32根据从马达控制装置1输入的栅极信号来生成用于控制逆变电路31所具有的各开关元件的pwm信号,并输出至逆变电路31。逆变电路31具有与u相、v相、w相的上臂及下臂分别对应的开关元件。通过根据从pwm信号驱动电路32输入的pwm信号来分别控制这些开关元件,从高压电池5供给的直流电得以转换为交流电而输出至马达2。平滑电容器33将从高压电池5供给至逆变电路31的直流电平滑化。
17.马达2是由从逆变器3供给的交流电来旋转驱动的同步马达,具有定子及转子。当从逆变器3输入的交流电施加至定子中设置的电枢线圈lu、lv、lw时,在马达2中导通三相交流电流iu、iv、iw,从而在各电枢线圈中产生电枢磁通。在这各个电枢线圈的电枢磁通与转
子中配置的永磁铁的磁铁磁通之间产生吸引力和斥力,由此在转子中产生转矩来旋转驱动转子。
18.马达2上安装有用于检测转子的旋转位置θ的旋转位置传感器4。旋转位置检测器41根据旋转位置传感器4的输入信号来运算旋转位置θ。旋转位置检测器41得到的旋转位置θ的运算结果输入至马达控制装置1,在通过由马达控制装置1根据马达2的感应电压的相位而生成栅极信号来进行的交流电的相位控制中加以利用。
19.此处,旋转位置传感器4为由铁心和绕组构成的旋转变压器更合适,但为gmr传感器等使用磁阻元件或霍耳元件的传感器也无问题。此外,旋转位置检测器41也可不使用来自旋转位置传感器4的输入信号而是使用流至马达2的三相交流电流iu、iv、iw或者从逆变器3施加至马达2的三相交流电压vu、vv、vw来推断旋转位置θ。
20.在逆变器3与马达2之间配置有电流检测单元7。电流检测单元7检测在马达2中流通的三相交流电流iu、iv、iw(u相交流电流iu、v相交流电流iv以及w相交流电流iw)。电流检测单元7例如是使用霍耳电流传感器等而构成。电流检测单元7得到的三相交流电流iu、iv、iw的检测结果输入至马达控制装置1,在马达控制装置1所进行的栅极信号的生成中加以利用。再者,图1中展示了电流检测单元7由3个电流检测器构成的例子,但也可将电流检测器设为2个,根据三相交流电流iu、iv、iw的和为零这一事实来算出剩下的1个相的交流电流。此外,也可利用插入于平滑电容器33与逆变器3之间的分流电阻等来检测从高压电池5流入逆变器3的脉冲状的直流电流,根据该直流电流和从逆变器3施加至马达2的三相交流电压vu、vv、vw来求三相交流电流iu、iv、iw。
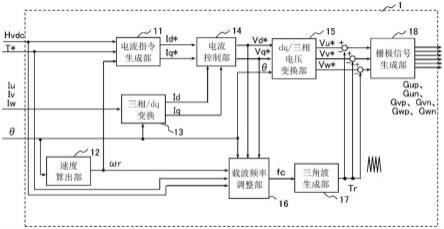
21.接着,对马达控制装置1的详情进行说明。图2为表示本发明的第1实施方式的马达控制装置1的功能构成的框图。图2中,马达控制装置1具有电流指令生成部11、速度算出部12、三相/dq变换电流控制部13、电流控制部14、dq/三相电压指令变换部15、载波频率调整部16、三角波生成部17、栅极信号生成部18等各功能块。马达控制装置1例如由微电脑构成,可以通过在微电脑中执行规定程序来实现这些功能块。或者,也可使用逻辑ic或fpga等硬件电路来实现这些功能块的一部分或全部。
22.电流指令生成部11根据所输入的转矩t*指令和电源电压hvdc来运算d轴电流指令id*及q轴电流指令iq*。此处,例如使用预先设定的电流指令图和数式等来求与转矩指令t*相应的d轴电流指令id*、q轴电流指令iq*。
23.速度算出部12根据旋转位置θ的时间变化来运算表示马达2的旋转速度(转速)的马达转速ωr。再者,马达转速ωr可为以角速度(rad/s)或转速(rpm)中的任一者表示的值。此外,也可将这些值相互转换来加以使用。
24.三相/dq变换电流控制部13对电流检测单元7所检测到的三相交流电流iu、iv、iw进行基于旋转位置检测器41所求出的旋转位置θ的dq变换,运算出d轴电流值id及q轴电流值iq。
25.电流控制部14根据从电流指令生成部11输出的d轴电流指令id*及q轴电流指令iq*与从三相/dq变换电流控制部13输出的d轴电流值id及q轴电流值iq的偏差、以这些值分别一致的方式运算d轴电压指令vd*及q轴电压指令vq*。此处,例如通过pi控制等控制方式来求与d轴电流指令id*与d轴电流值id的偏差相应的d轴电压指令vd*和与q轴电流指令iq*与q轴电流值iq的偏差相应的q轴电压指令vq*。
26.dq/三相电压指令变换部15对电流控制部14所运算出的d轴电压指令vd*及q轴电压指令vq*进行基于旋转位置检测器41所求出的旋转位置θ的三相变换,运算出三相电压指令vu*、vv*、vw*(u相电压指令值vu*、v相电压指令值vv*以及w相电压指令值vw*)。由此,生成与转矩指令t*相应的三相电压指令vu*、vv*、vw*。
27.载波频率调整部16根据电流指令生成部11所生成的d轴电压指令vd*及q轴电压指令vq*、旋转位置检测器41所求出的旋转位置θ、速度算出部12所求出的转速ωr、转矩指令t*、电源电压hvdc来运算表示栅极信号的生成中使用的载波的频率的载波频率fc。三角波生成部17根据该载波频率fc来生成载波,由此,以能够抑制马达2中产生的振动和噪音的方式调整载波的频率。再者,载波频率调整部16对载波频率fc的运算方法的详情于后文叙述。
28.三角波生成部17根据载波频率调整部16所运算出的载波频率fc来生成三角波信号(载波信号)tr。
29.栅极信号生成部18使用从三角波生成部17输出的三角波信号tr对从dq/三相电压指令变换部15输出的三相电压指令vu*、vv*、vw*分别进行脉宽调制,生成用于控制逆变器3的动作的栅极信号。具体而言,根据从dq/三相电压指令变换部15输出的三相电压指令vu*、vv*、vw*与从三角波生成部17输出的三角波信号tr的比较结果而针对u相、v相、w相这各相来生成脉冲状的电压。继而,根据生成的脉冲状的电压来生成针对逆变器3的各相的开关元件的栅极信号。此时,使各相的上臂的栅极信号gup、gvp、gwp分别作逻辑反相而生成下臂的栅极信号gun、gvn、gwn。栅极信号生成部18所生成的栅极信号从马达控制装置1输出至逆变器3的pwm信号驱动电路32,由pwm信号驱动电路32转换为pwm信号。由此,逆变电路31的各开关元件得到导通/断开控制,从而调整逆变器3的输出电压。
30.接着,对马达控制装置1中的载波频率调整部16的动作进行说明。如前文所述,载波频率调整部16根据d轴电压指令vd*及q轴电压指令vq*、旋转位置θ、转速ωr、转矩指令t*以及电源电压hvdc来运算载波频率fc。通过对三角波生成部17根据该载波频率fc来生成的三角波信号tr的频率逐次进行控制,以作为载波的三角波信号tr的周期和相位各自成为期望的关系的方式对与转矩指令t*相应的三相电压指令vu*、vv*、vw*的电压波形进行调整。再者,此处的所谓期望的关系,是指因pwm信号下的逆变器3的开关动作所引起的高次谐波电流而在马达2中产生的电磁激振力或转矩脉动与因与电压指令相应的基波电流而产生的电磁激振力或转矩脉动成为同周期且反相位这样的关系。
31.图3为本发明的第1实施方式的载波频率调整部16的框图。载波频率调整部16具有同步pwm载波数选择部161、电压相位运算部162、调制率运算部163、电压相位误差运算部164、同步载波频率运算部165、载波频率设定部166。
32.同步pwm载波数选择部161根据转速ωr来选择同步pwm载波数nc,所述同步pwm载波数nc表示同步pwm控制中的对应于电压波形的1周期的载波的数量。同步pwm载波数选择部161例如以nc
±
3或nc
×
2的值与因与电压指令相应的基波电流而在马达2中产生的电磁激振力或转矩脉动的次数(6的倍数)一致的方式选择同步pwm载波数nc。具体而言,例如,若转速ωr不到规定阈值,则设定nc=15,若为阈值以上,则设定nc=9。由此,可以根据转速ωr将与马达2中因基波电流而产生的电磁激振力或转矩脉动的次数相对应的同步pwm载波数nc设定为最佳值。
33.再者,下面对像上述那样设定同步pwm载波数nc的原因进行说明。脉宽调制带来的
高次谐波电流的脉动(边带波分量)的次数可使用同步pwm载波数nc而表示为nc
±
2、nc
±
4、nc
×2±
1。因这些边带波分量而在马达2中产生的电磁激振力和转矩脉动的次数为nc
±
3、nc
×
2。因此,要在马达2中抑制基波电流带来的电磁激振力或转矩脉动,优选通过像上述那样设定同步pwm载波数nc而对作为载波的三角波信号tr进行调整,以满足前文所述的期望的关系。由此,利用脉宽调制中使用的载波带来的电磁激振力或转矩脉动来抵消基波电流带来的电磁激振力或转矩脉动,从而能抑制马达2中产生的振动和噪音。
34.图4为表示载波频率固定时的声音和振动的频谱强度的实测数据的一例的图。图4中展示了使作为载波的三角波信号tr的频率固定、使马达2的转速从0rpm上升到任意转速时在马达2中产生的声音和振动的频谱强度的实测数据的一例。图4中,横轴表示从开始马达2的旋转起的经过时间,纵轴表示频率。此外,图4中是通过线的浓淡来表示声音和振动的强度。
35.观察图4得知,因脉宽调制中使用的载波而在马达2中产生的电磁激振力和转矩脉动在fc
±
3f1的频率下在频谱上表现得较强。再者,图4中使载波频率fc固定。此外,f1表示与电压指令相应的基波电流的频率,其与马达2的转速(旋转速度ωr)成比例。
36.同步pwm载波数选择部161立足于以上事实、根据转速ωr而以前文所述那样的值来选择同步pwm载波数nc。例如,若将同步pwm载波数设为nc=9,则根据前文所述的式子来计算因载波所引起的高次谐波电流而在马达2中产生的电磁激振力和转矩脉动的次数为9-3=6、9 3=12、9
×
2=18。计算出的这些次数均与因基波电流而产生的电磁激振力和转矩脉动的次数即6的倍数一致。此外,在将同步pwm载波数设定为nc=15的情况下也一样,与因基波电流而产生的电磁激振力和转矩脉动的次数即6的倍数一致。因此,可以利用脉宽调制中使用的载波带来的电磁激振力或转矩脉动来抵消基波电流带来的电磁激振力或转矩脉动。
37.再者,同步pwm载波数选择部161也可不仅根据转速ωr还根据转矩指令t*来进行同步pwm载波数nc的选择。此外,例如也可设定滞变等在转速ωr上升时和下降时改变同步pwm载波数nc的选择基准。
38.电压相位运算部162根据d轴电压指令vd*及q轴电压指令vq*、旋转位置θ、转速ωr以及载波频率fc而通过下式(1)~(4)来运算电压相位θv。θv=θ φv φdqv 0.5π
···
(1)φv=ωr
·
1.5tc
···
(2)tc=1/fc
···
(3)φdqv=atan(vq/vd)
···
(4)
39.此处,φv表示电压相位的运算滞后补偿值,tc表示载波周期,φdqv表示距d轴的电压相位。运算滞后补偿值φv是对以下现象进行补偿的值:在从旋转位置检测器41获取到旋转位置θ起到马达控制装置1对逆变器3输出栅极信号为止的期间内产生相当于1.5个控制周期的运算滞后。再者,在本实施方式中,在式(1)右边第4项加上了0.5π。该运算的目的在于,由于通过式(1)右边第1项~第3项运算出的电压相位为cos波,所以要将其视点变换为sin波。
40.调制率运算部163按照下式(5)而根据d轴电压指令vd*及q轴电压指令vq*、电源电压hvdc来运算调制率h。再者,调制率h表示从高压电池5供给至逆变器3的直流电与从逆变
器3输出至马达2的交流电的电压振幅比。h=√(vd^2 vq^2)/(hvdc/2)
···
(5)
41.电压相位误差运算部164根据由同步pwm载波数选择部161选择的同步pwm载波数nc、由电压相位运算部162运算出的电压相位θv、由调制率运算部163运算出的调制率h、转速ωr、以及转矩指令t*来运算电压相位误差δθv。电压相位误差δθv表示对逆变器3的电压指令即三相电压指令vu*、vv*、vw*与脉宽调制中使用的载波即三角波信号tr的相位差。电压相位误差运算部164按每一规定运算周期来运算电压相位误差δθv,由此,在载波频率调整部16中能以改变对逆变器3的电压指令与脉宽调制中使用的载波的相位差的方式进行三角波信号tr的频率调整。
42.同步载波频率运算部165按照下式(6)而根据由电压相位误差运算部164运算出的电压相位误差δθv、转速ωr、以及由同步pwm载波数选择部161选择的同步pwm载波数nc来运算同步载波频率fcs。fcs=ωr
·
nc
·
(1 δθv
·
k)/(2π)
···
(6)
43.同步载波频率运算部165例如可以通过pll(phase locked loop)控制来运算基于式(6)的同步载波频率fcs。再者,式(6)中,增益k可设为固定值,也可根据条件来变化。
44.载波频率设定部166根据转速ωr来选择由同步载波频率运算部165运算出的同步载波频率fcs和非同步载波频率fcns中的任一者,并作为载波频率fc输出。非同步载波频率fcns是载波频率设定部166中预先设定的固定值。再者,也可预先准备多个非同步载波频率fcns而根据转速ωr来选择其中任一个。例如,能够以转速ωr的值越大则非同步载波频率fcns的值便越大的方式在载波频率设定部166中选择非同步载波频率fcns而作为载波频率fc输出。
45.接着,对载波频率调整部16中的电压相位误差运算部164中的电压相位误差δθv的运算方法的详情进行说明。
46.图5为本发明的第1实施方式的电压相位误差运算部164的框图。电压相位误差运算部164具有基准电压相位运算部1641、脉动频率转换部1642、脉动贡献度选择部1643、电磁激振力减少相位差表1644a、转矩脉动减少相位差表1644b、电压相位差转换部1645、加法部1646、减法部1647。
47.基准电压相位运算部1641根据同步pwm载波数nc和电压相位θv来运算用于对同步pwm控制中的载波的相位进行固定的基准电压相位θvb。通过由基准电压相位运算部1641进行基准电压相位θvb的运算,能使针对电压相位θv的载波的周期与因基波电流而在马达2中产生的电磁激振力或转矩脉动的周期相互一致。
48.图6为基准电压相位运算部1641所实施的基准电压相位运算的概念图。基准电压相位运算部1641例如运算像图6所示那样在0至2π之间以与同步pwm载波数nc相应的级数呈阶梯状变化的基准电压相位θvb。再者,为了使说明易于理解,图6中展示的是同步pwm载波数nc为3时的例子,但实际上同步pwm载波数nc优选像前文所述那样设为nc=9或nc=15。
49.在本实施方式中,为了降低处理负荷,例如像图6所示,载波频率调整部16仅在三角载波从最小值(波谷)上升至最大值(波峰)的区间即波谷分割区间内能够调整载波的频率。在该情况下,同步载波频率运算部165像后文叙述那样在载波的波谷分割区间内利用电压相位误差δθv来逐次运算同步载波频率fcs,由此实施同步pwm控制。基准电压相位运算
部1641像图6所示那样以π/3间隔发生变化的离散值的形式算出该电压相位误差δθv的运算中使用的基准电压相位θvb。再者,该基准电压相位θvb的间隔根据同步pwm载波数nc发生变化。同步pwm载波数nc越大,基准电压相位θvb的间隔便越小。
50.具体而言,基准电压相位运算部1641按照下式(7)~(8)而根据电压相位θv、同步pwm载波数nc来运算基准电压相位θvb。θvb=int(θv/θs)
·
θs 0.5θs
···
(7)θs=2π/nc
···
(8)
51.此处,θs表示每1个载波的电压相位θv的变化宽度,int表示小数点以下的舍去运算。
52.再者,在本实施方式中,在三角载波从最大值(波峰)下降至最小值(波谷)的区间即波峰分割区间内以基准电压相位θvb为0rad的方式在基准电压相位运算部1641中按照式(7)~(8)来运算基准电压相位θvb。然而,基准电压相位θvb为0rad的期间并不限于波峰分割区间。只要能使用电压相位θv来运算在0至2π之间以与同步pwm载波数nc相应的级数呈阶梯状变化的基准电压相位θvb,则基准电压相位运算部1641也可通过式(7)~(8)以外的运算方法来进行基准电压相位θvb的运算。
53.脉动频率转换部1642按照下式(9)将转速ωr转换为脉动频率fr。fr=ωr
·4·
nr/(2π)
···
(9)
54.此处,nr表示因基波电流而产生的电磁激振力或转矩脉动的次数,如前文所述,其为6的倍数(6、12、18、24...)。在脉动频率转换部1642中,可以根据视为抑制对象的电磁激振力或转矩脉动的次数来设定nr的值。
55.脉动贡献度选择部1643根据由脉动频率转换部1642求出的脉动频率fr来选择马达2的径向上产生的电磁激振力和马达2的周向上产生的转矩脉动当中对马达2中产生的振动和噪音的贡献度大的一方。
56.图7为表示马达2中产生的每一频率的电磁激振力和转矩脉动带来的噪音电平的一例的图。图7中,横轴表示频率,纵轴表示噪音电平的大小。根据图7得知,区间a、c内周向的转矩脉动带来的噪音电平高,区间b内径向的电磁激振力带来的噪音电平高。这样的噪音电平的频率特性是由马达2的结构决定,所以是马达2的每一规格所固有的。因此,通过借助模拟或实测来预先获取到图7所示那样的每一频率的噪音电平的关系,可以由脉动贡献度选择部1643根据与转速ωr相应的脉动频率fr来选择电磁激振力和转矩脉动中的一方作为对马达2中产生的振动和噪音的贡献度大的一方。
57.电磁激振力减少相位差表1644a是表示用于减少马达2的电磁激振力的相位差的表格,转矩脉动减少相位差表1644b是表示用于减少马达2的转矩脉动的相位差的表格。此处的所谓相位差,意指相对于基准电压相位θvb的相位差。这些表格是针对转速ωr、转矩指令t*以及调制率h的多个值分别加以设定。在电压相位误差运算部164中,根据转速ωr、转矩指令t*、调制率h来分别参考这些表格,由此能分别确定适于电磁激振力的减少的相位差和适于转矩脉动的减少的相位差。
58.例如通过模拟或实测等而针对每一转速ωr、转矩指令t*、调制率h来预先获取到电磁激振力或转矩脉动得以减少的相对于基准电压相位θvb的相位差数据。根据预先获取到的这些相位差数据来分别设定电磁激振力减少相位差表1644a及转矩脉动减少相位差表
1644b。此处,针对每一调制率h来设定电磁激振力减少相位差表1644a和转矩脉动减少相位差表1644b的原因是为了对以下事实进行补偿:因高次谐波电流而产生的电磁激振力或转矩脉动的主导性次数根据调制率h而变化。再者,根据这些表格而输出的相位差可为电流相位差和电压相位差中的任一者。在本实施方式中,从电磁激振力减少相位差表1644a及转矩脉动减少相位差表1644b分别输出的相位差为电流相位差,在后级的电压相位差转换部1645中进行从电流相位差向电压相位差的转换。
59.图8为表示针对每一转速ωr的基准电压相位θvb的、转矩脉动和电磁激振力相对于基准电压相位θvb的相位差数据例的图。图9为表示针对每一调制率h的基准电压相位θvb的、转矩脉动和电磁激振力相对于基准电压相位θvb的相位差数据例的图。再者,转矩指令t*也会根据转速ωr发生变化,所以图8中还展示有针对每一转矩指令t*的基准电压相位θvb的、转矩脉动和电磁激振力相对于基准电压相位θvb的相位差数据。
60.图8、图9中,针对相对于基准电压相位θvb的相位差为-180
°
至 180
°
这一范围而像前文所述那样以因与电压指令相应的基波电流而在马达2中产生的转矩脉动和电磁激振力的形式分别展示了6的倍数即6次、12次、18次、24次这各次数下的转矩脉动和电磁激振力的大小以及它们合计得到的转矩脉动的和还有电磁激振力的和。在电压相位误差运算部164中,根据这些相位差数据而例如将转矩脉动的和达到最小的相位差和电磁激振力的和达到最小的相位差分别加以表格化,由此能设定转矩脉动减少相位差表1644b及电磁激振力减少相位差表1644a。或者,也可将能够有效减少特定次数例如12次的转矩脉动或电磁激振力的相位差表格化来设定转矩脉动减少相位差表1644b及电磁激振力减少相位差表1644a,以规避共振频率等。
61.在通过脉动贡献度选择部1643选择的是电磁激振力作为对马达2中产生的振动和噪音的贡献度大的一方的情况下,根据转速ωr、转矩指令t*、调制率h而在电磁激振力减少相位差表1644a中确定的电流相位差被输入至电压相位差转换部1645。另一方面,在通过脉动贡献度选择部1643选择的是转矩脉动作为对马达2中产生的振动和噪音的贡献度大的一方的情况下,根据转速ωr、转矩指令t*、调制率h而在转矩脉动减少相位差表1644b中确定的电流相位差被输入至电压相位差转换部1645。
62.电压相位差转换部1645对从电磁激振力减少相位差表1644a或转矩脉动减少相位差表1644b输入的电流相位差加上0.5π,由此将电流相位差转换为电压相位差。此处加上0.5π的原因在于,高次谐波电流与基波电流相比不易受电阻的影响,所以主要是马达2的电感分量中流通的高次谐波电流的微分值(超前0.5π)对马达2的电压产生影响。再者,在像前文所述那样将从电磁激振力减少相位差表1644a及转矩脉动减少相位差表1644b分别输出的相位差设为电压相位差的情况下,无须设置电压相位差转换部1645。
63.加法部1646对基准电压相位运算部1641中运算出的基准电压相位θvb加上电压相位差转换部1645中运算出的电压相位差,运算出用于减少因高次谐波电流而产生的电磁激振力或转矩脉动的修正基准电压相位θvb2。
64.减法部1647从电压相位θv减去修正基准电压相位θvb2,运算出电压相位误差δθv。
65.在电压相位误差运算部164中,像以上说明过的那样运算电压相位误差δθv。由此,可以根据转速ωr、转矩指令t*、调制率h而以与三相电压指令vu*、vv*、vw*相应的基波
电流带来的转矩脉动或电磁激振力也就是基波电流的高次谐波分量当中以6的倍数为次数的各高次谐波分量的转矩脉动或电磁激振力被脉宽调制中使用的载波带来的转矩脉动或电磁激振力抵消的方式决定电压相位误差δθv。结果,能以减少马达2中产生的转矩脉动或电磁激振力的方式改变对逆变器3的电压指令与脉宽调制中使用的载波的相位差来设定载波频率fc。
66.图10为表示本发明得到的电磁激振力的减少效果的图。图10中,以虚线表示不运用本发明的情况下因基波电流而产生的电磁激振力的例子(现有技术),而且以实线表示运用本发明的情况下因基波电流而产生的电磁激振力的例子(本发明)。再者,所谓不运用本发明的情况,相当于利用电压相位θv与基准电压相位θvb的差分来运算电压相位误差δθv并用其进行同步pwm控制的情况。另一方面,所谓运用本发明的情况,是像上文中说明过的那样将利用电磁激振力减少相位差表1644a求出的相位差也就是减少马达2的电磁激振力的相位差加到基准电压相位θvb中而得到修正基准电压相位θvb2,据此运算电压相位误差δθv并用其进行同步pwm控制的情况。根据图10可以确认,运用本发明的情况与不运用本发明的情况相比,能够减少电磁激振力,本发明是有效的。
67.图11为表示本发明得到的转矩脉动的减少效果的图。图11中,以虚线表示不运用本发明的情况下因基波电流而产生的转矩脉动的例子(现有技术),而且以实线表示运用本发明的情况下因基波电流而产生的转矩脉动的例子(本发明)。再者,所谓不运用本发明的情况,相当于利用电压相位θv与基准电压相位θvb的差分来运算电压相位误差δθv并用其进行同步pwm控制的情况。另一方面,所谓运用本发明的情况,是像上文中说明过的那样将利用转矩脉动减少相位差表1644b求出的相位差也就是减少马达2的转矩脉动的相位差加到基准电压相位θvb中而得到修正基准电压相位θvb2,据此运算电压相位误差δθv并用其进行同步pwm控制的情况。根据图11可以确认,运用本发明的情况与不运用本发明的情况相比,能够减少转矩脉动,本发明是有效的。
68.再者,在载波频率调整部16中,上述处理可在马达2的牵引驱动时、再生驱动时中的任意时候进行。牵引驱动时,转矩指令t*为正值,再生驱动时,转矩指令t*为负值。因而,在载波频率调整部16中,根据转矩指令t*的值来判断马达2为牵引驱动或再生驱动中的哪一种,根据该判断的结果在电压相位误差运算部164中进行上述那样的运算处理,由此,能以减少马达2中产生的转矩脉动或电磁激振力的方式改变电压相位误差δθv来设定载波频率fc。
69.根据以上说明过的本发明的一实施方式,取得以下作用效果。
70.(1)一种马达控制装置1,其对马达2的驱动进行控制,所述马达2与进行直流电向交流电的功率变换的逆变器3连接而使用该交流电进行驱动,该马达控制装置1具备:三角波生成部17,其生成作为载波的三角波信号tr;载波频率调整部16,其对表示三角波信号tr的频率的载波频率fc进行调整;以及栅极信号生成部18,其使用三角波信号tr对与转矩指令t*相应的三相电压指令vu*、vv*、vw*进行脉宽调制,生成用于控制逆变器3的动作的栅极信号。载波频率调整部16根据转矩指令t*和马达2的转速ωr、以改变表示三相电压指令vu*、vv*、vw*与三角波信号tr的相位差的电压相位误差δθv的方式调整载波频率fc。因此,能够有效地抑制马达2中产生的振动和噪音。
71.(2)载波频率调整部16通过同步pwm载波数选择部161将同步pwm载波数nc选择为
规定的整数值,由此,以载波频率fc变为三相电压指令vu*、vv*、vw*的频率的整数倍的方式调整载波频率fc。因此,以作为载波的三角波信号tr的周期和相位各自成为期望的关系的方式对三相电压指令vu*、vv*、vw*的电压波形进行调整,从而能可靠地进行同步pwm控制。
72.(3)载波频率调整部16通过脉动贡献度选择部1643而根据马达2的转速ωr来选择马达2的周向上产生的转矩脉动和马达2的径向上产生的电磁激振力中的一方。并且,通过电压相位误差运算部164而以减少所选择的转矩脉动或电磁激振力的方式改变电压相位误差δθv。因此,能够针对转矩脉动带来的噪音电平和电磁激振力带来的噪音电平分别具有图7所示那样的频率特性的马达2而在任意转速下有效地抑制振动和噪音。
73.(4)载波频率调整部16根据转矩指令t*、转速ωr、以及调制率h来改变电压相位误差δθv,其中,调制率h由调制率运算部163运算、表示供给至逆变器3的直流电与从逆变器3输出的交流电的电压振幅比。因此,即便在因高次谐波电流而产生的电磁激振力或转矩脉动的主导性次数根据调制率h而变化、由此使得马达2的振动和噪音根据调制率h而变化这样的情况下,也能可靠地补偿该变化而有效地抑制马达2中产生的振动和噪音。
74.(5)载波频率调整部16参考电磁激振力减少相位差表1644a及转矩脉动减少相位差表1644b,由此,根据与三相电压指令vu*、vv*、vw*相应的基波电流的高次谐波分量当中以6的倍数为次数的各高次谐波分量来改变电压相位误差δθv。因此,能够利用脉宽调制中使用的载波带来的电磁激振力或转矩脉动来抵消基波电流带来的电磁激振力或转矩脉动而有效地抑制马达2中产生的振动和噪音。
75.(6)载波频率调整部16可根据转矩指令t*来判断马达2为牵引驱动或再生驱动中的哪一种,根据该判断的结果来改变电压相位误差δθv。如此一来,可以根据马达2的驱动状态来实现最佳控制。
76.(第2实施方式)(串联式混合动力系统)接着,对本发明的第2实施方式进行说明。在本实施方式中,对在马达与发动机组合而成的混合动力系统中的运用例进行说明。
77.图12为表示本发明的第2实施方式的混合动力系统的构成的图。混合动力系统72具有第1实施方式中说明过的马达控制装置1、马达2、逆变器3、旋转位置检测器41以及高压电池5,而且具有与马达2、逆变器3、旋转位置检测器41分别对应的马达2a、逆变器3a以及旋转位置检测器41a。
78.马达2a上安装有用于检测转子的旋转位置θa的旋转位置传感器4a。旋转位置检测器41a根据旋转位置传感器4a的输入信号来运算旋转位置θa,并输出至马达控制装置1。在逆变器3a与马达2a之间配置有电流检测单元7a。
79.逆变器3a具有逆变电路31a、pwm信号驱动电路32a以及平滑电容器33a。pwm信号驱动电路32a连接于与逆变器3的pwm信号驱动电路32共通的马达控制装置1,根据从马达控制装置1输入的栅极信号来生成用于控制逆变电路31a所具有的各开关元件的pwm信号,并输出至逆变电路31a。逆变电路31a及平滑电容器33a连接于与逆变电路31及平滑电容器33共通的高压电池5。
80.对马达2的转矩指令t*和对马达2a的转矩指令ta*输入至马达控制装置1。马达控制装置1根据这些转矩指令、通过像第1实施方式中说明过的方法来分别生成用于控制马达2、2a的驱动的栅极信号,并分别输出至逆变器3、3a。即,通过电压相位误差运算部164以能
够分别抑制马达2、2a中产生的振动和噪音的方式运算电压相位误差来调整载波的频率。再者,关于该运算中所参考的电磁激振力减少相位差表1644a及转矩脉动减少相位差表1644b,例如设为马达2、2a各自中能最有效地减少电磁激振力或转矩脉动的值即可。或者,也可设为以下值:不是马达2、2a各自中能最有效地减少电磁激振力或转矩脉动的值,但能最有效地减少马达2、2a的脉动的总和。
81.发动机系统721和控制单元722连接于马达2。发动机系统721根据控制单元722的控制进行驱动而使马达2旋转驱动。马达2通过由发动机系统721加以旋转驱动而作为发电机进行动作,产生交流电。马达2所产生的交流电由逆变器3转换为直流电而充入高压电池5。由此,能使混合动力系统72作为串联式混合动力系统发挥功能。再者,也可使发动机系统721和控制单元722能连接于马达2a。
82.(第3实施方式)(升压变换器系统)接着,对本发明的第3实施方式进行说明。在本实施方式中,对在升压变换器系统中的运用例进行说明。
83.图13为表示本发明的第3实施方式的升压变换器系统的构成的图。升压变换器系统73具有第1实施方式中说明过的马达控制装置1、马达2、逆变器3、旋转位置检测器41以及高压电池5,而且具有升压变换器74。
84.升压变换器74将开关元件743、744串联,高压电池5经由电抗器742连接于串联在一起的开关元件743、744的中间连接点。此外,电容器741与高压电池5并联。
85.升压变换器74由马达控制装置1给予指令而使得开关元件743、744分别进行开关动作,由此将从高压电池5供给的直流电压升压至升压变换器系统73的效率最佳的直流电压。由此,生成将高压电池5升压得到的直流电而供给至逆变器3。逆变器3根据从马达控制装置1输出的栅极信号进行动作,进行经升压变换器74升压后的直流电向交流电的功率变换。
86.在本实施方式中,通过升压变换器74对直流电压进行升压,所以在马达控制装置1中,调制率运算部163按照下式(10)而根据d轴电压指令vd*及q轴电压指令vq*、升压后直流电压hvdc'来运算升压后调制率h'。h'=√(vd^2 vq^2)/(hvdc'/2)
···
(10)
87.在本实施方式中,在电压相位误差运算部164中根据转速ωr、转矩指令t*、升压后调制率h'来参考电磁激振力减少相位差表1644a及转矩脉动减少相位差表1644b,由此来分别确定适于电磁激振力的减少的相位差和适于转矩脉动的减少的相位差。
88.(第4实施方式)接着,对本发明的第4实施方式进行说明。在本实施方式中,对在电动助力转向系统中的运用例进行说明。
89.图14为表示本发明的第4实施方式的电动助力转向系统的构成的图。电动助力转向系统61具有驱动控制系统75,所述驱动控制系统75包含第1实施方式中说明过的马达控制装置1和冗余化的驱动系统102a、102b。电动助力转向系统61利用转矩传感器63来检测方向盘62的转矩,根据该转矩使驱动控制系统75动作。由此产生与方向盘62的输入相应的辅助转矩,并经由转向辅助机构64输出至转向机构65,由此对操舵力进行辅助。结果,转向机构65使得轮胎66转舵,从而控制车辆的行进方向。
90.车辆的电动助力转向系统通常经由方向盘而直接联系到驾驶员,所以振动和噪音容易传递至驾驶员,对振动和噪音的要求规格高。尤其是在驾驶员正以高速旋转方向盘的状态下,与其他产生因素相比,马达的动作在振动和噪音的原因上占主导。对此,本实施方式的电动助力转向系统61能够有效减少驾驶员正以高速旋转方向盘62的状态下的振动,所以能实现低振动且低噪音的电动助力转向系统。
91.图15为表示本发明的第4实施方式的电动助力转向系统61中的驱动控制系统75的构成的图。在驱动控制系统75中,马达控制装置1、马达2以及高压电池5共通地连接于冗余化的驱动系统102a、102b。在本实施方式中,马达2具有2个绕组系统21、22,一绕组系统21构成驱动系统102a,另一绕组系统22构成驱动系统102b。
92.驱动系统102a具有逆变器3及旋转位置检测器41,马达2上安装有用于检测与绕组系统21相对应的转子的旋转位置θ的旋转位置传感器4。由逆变器3生成的交流电流至马达2的绕组系统21而使马达2旋转驱动。在驱动系统102a中,在逆变器3与马达2之间配置有电流检测单元7。
93.驱动系统102b具有逆变器3a及旋转位置检测器41a,马达2上安装有用于检测与绕组系统22相对应的转子的旋转位置θa的旋转位置传感器4a。由逆变器3a生成的交流电流至马达2的绕组系统22而使马达2旋转驱动。在驱动系统102b中,在逆变器3a与马达2之间配置有电流检测单元7a。再者,逆变器3a、旋转位置检测器41a、旋转位置传感器4a以及电流检测单元7a分别与第2实施方式中说明过的图12的各单元相同。
94.对马达2的转矩指令t*输入至马达控制装置1。马达控制装置1根据所输入的转矩指令t*、通过像第1实施方式中说明过的方法来生成用于控制马达2的驱动的栅极信号,并分别输出至逆变器3、3a。即,通过电压相位误差运算部164以能够分别抑制驱动系统102a、102b中产生的振动和噪音的方式运算电压相位误差来调整载波的频率。再者,关于该运算中所参考的电磁激振力减少相位差表1644a及转矩脉动减少相位差表1644b,例如设为驱动系统102a、102b各自中能最有效地减少电磁激振力或转矩脉动的值即可。或者,也可设为以下值:不是驱动系统102a、102b各自中能最有效地减少电磁激振力或转矩脉动的值,但能最有效地减少驱动系统102a、102b的脉动的总和。
95.再者,以上说明过的实施方式和各种变形例只是一例,只要不损害发明的特征,本发明便不限定于这些内容。此外,上文中对各种实施方式和变形例进行了说明,但本发明并不限定于这些内容。在本发明的技术思想的范围内思索的其他形态也包含在本发明的范围内。符号说明
[0096]1…
马达控制装置,2、2a
…
永磁铁同步马达(马达),3、3a
…
逆变器,4、4a
…
旋转位置传感器,5
…
高压电池,7、7a
…
电流检测单元,11
…
电流指令生成部,12
…
速度算出部,13
…
三相/dq变换电流控制部,14
…
电流控制部,15
…
dq/三相电压指令变换部,16
…
载波频率调整部,17
…
三角波生成部,18
…
栅极信号生成部,31、31a
…
逆变电路,32、32a
…
pwm信号驱动电路,33、33a
…
平滑电容器,41、41a
…
旋转位置检测器,61
…
电动助力转向系统,72
…
串联式混合动力系统,73
…
升压变换器系统,74
…
升压变换器,75
…
驱动控制系统,100
…
马达驱动系统,102a、102b
…
驱动系统,161
…
同步pwm载波数选择部,162
…
电压相位运算部,163
…
调制率运算部,164
…
电压相位误差运算部,165
…
同步载波频率运算部,166
…
载波频
率设定部,721
…
发动机系统,722
…
控制单元,1641
…
基准电压相位运算部,1642
…
脉动频率转换部,1643
…
脉动贡献度选择部,1644a
…
电磁激振力减少相位差表,1644b
…
转矩脉动减少相位差表,1645
…
电压相位差转换部,1646
…
加法部,1647
…
减法部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。