1.本发明涉及真空吸尘器,更详细而言,涉及一种还能够利用旋转刷干净地清扫光滑的地面上的灰尘的真空吸尘器。
背景技术:
2.真空吸尘器根据安装到其上的刷子的类型而具有不同的清扫能力。
3.在不平整的地毯上,硬质塑料材质的地毯用刷子在清扫效率方面有利。
4.另一方面,在地板或地板革等光滑的地面上,柔软的绒材质的地板用刷子在清扫效率方面有利。
5.如果使用绒材质的地板用刷子,则会防止由刷子引起的地面的刮伤。另外,如果使绒材质的刷子高速旋转,则还能使贴附在地面上的微尘漂浮,然后吸入并去除。
6.与此相关地,韩国公开特许公报第2019-0080855号(以下,“现有文献1”)披露了一种真空吸尘器。现有文献1的真空吸尘器包括本体和吸入管嘴。吸入管嘴包括:壳体、旋转清扫部、驱动部以及旋转支撑部。
7.壳体包括第一侧面盖和第二侧面盖。第一侧面盖和第二侧面盖分别结合于腔室的两侧侧面。
8.第一侧面盖上固定有驱动部。驱动部被插入到旋转清扫部一侧并将动力传递到旋转清扫部。驱动部包括:马达、马达支撑件、齿轮部、盖部、轴以及轴承。轴连接齿轮部和旋转清扫部。轴上设置有固定到旋转清扫部的固定构件。旋转清扫部利用通过驱动部传递的驱动力进行旋转而与地面摩擦。
9.第二侧面盖上具有旋转支撑部。旋转支撑部在驱动部的相反侧以能够旋转的方式支撑旋转清扫部。
10.所有组装体均存在公差(tolerance)。因此,旋转清扫部在驱动部和旋转支撑部之间可以在沿轴向形成的公差范围内移动。
11.旋转清扫部是利用复数根毛使地面上的灰尘向后方移动的结构。在使用真空吸尘器时,旋转清扫部进行旋转并与地面产生摩擦力。地面可以是合成树脂或木材。
12.用户主要通过使吸入管嘴沿前后方向移动来清扫地面。当吸入管嘴的方向转换时,吸入管嘴可以沿左右方向移动。或者,当吸入管嘴的方向转换时,吸入管嘴可以沿相对于前后方向倾斜的方向移动。
13.在使用真空吸尘器时,地面的反作用力和摩擦力将持续地作用于旋转清扫部。当吸入管嘴的方向转换时,地面的反作用力和摩擦力可以沿轴向施加到旋转清扫部。因此,现有文献1的真空吸尘器具有在使用时旋转清扫部受地面的反作用力和摩擦力而沿轴向游动的问题。
14.旋转清扫部的轴向游动可能会在旋转清扫部和旋转支撑部以及第一侧面盖和第二侧面盖与腔室的接触面产生噪音。
15.此外,旋转清扫部的轴向游动可能会损坏第一侧面盖和第二侧面盖与腔室的结合
结构。如果第一侧面盖和第二侧面盖与腔室的结合结构受到损坏,则在清扫地面时,旋转清扫部可能会剧烈地振动。这将导致马达的驱动力损失。其结果,旋转清扫部可能因无法正常地将地面上的灰尘漂浮而弱化清扫功能。
16.另外,在现有文献1的真空吸尘器中,驱动部在旋转清扫部内部通过固定构件与旋转清扫部结合。因此现有文献1的真空吸尘器存在难以实现驱动部和旋转清扫部的分解和组装的问题。
技术实现要素:
17.所要解决的问题
18.本发明要解决的一课题是提供一种阻止了由地面的反作用力和摩擦力引起的旋转刷的轴向游动的真空吸尘器。
19.本发明的要解决的一课题是提供一种阻止旋转刷的轴向游动和径向游动的真空吸尘器。
20.本发明要解决的一课题是提供一种易于实现驱动部和刷子模块的分解和组装的真空吸尘器。
21.解决问题的技术方案
22.在本发明实施例的真空吸尘器中,第一轴构件和第二轴构件可以形成复数个第一接触面。所述第一轴构件的旋转力可以从所述第一接触面传递到所述第二轴构件。
23.所述第一轴构件可以在所述第一接触面上将所述第二轴构件推向所述轴向的一侧。因此能够阻止由地面的反作用力和摩擦力引起的所述旋转刷的轴向游动。
24.本发明实施例的真空吸尘器可以包括本体和吸入管嘴。
25.所述本体可以形成空气的压力差。所述本体的内部可以设置有送风机。
26.所述吸入管嘴可以利用空气的压力差来吸入地面上的灰尘。
27.所述吸入管嘴可以包括:壳体、所述驱动部、所述旋转刷以及所述装卸盖。
28.所述壳体可以形成使灰尘向所述本体移动的入口。所述入口可以形成在所述壳体的后侧。所述入口可以形成圆筒形态。
29.所述驱动部可以设置于所述壳体。所述驱动部可以使第一轴构件旋转。所述驱动部可以包括马达和传动装置。
30.所述旋转刷可以与所述第一轴构件咬合而旋转,以将所述地面上的灰尘推向所述入口侧。
31.所述旋转刷可以包括:主体、刷子构件、第二轴构件以及第三轴构件。
32.所述主体可以呈内部中空的圆筒形。
33.所述主体的中心轴可以用作所述旋转刷的中心轴。所述主体可以沿圆周方向形成均匀的旋转惯性。所述刷子构件可以贴附于所述主体的外表面上,以与所述地面接触。
34.所述刷子构件可以包括复数根毛。当所述主体旋转时,复数根所述毛可以使地面上的灰尘和杂质移动。复数根所述毛可以包括纤维毛和金属毛。
35.所述主体可以通过所述第三轴构件以能够旋转的方式与所述装卸盖连接。所述装卸盖可以以所述旋转刷的旋转轴为中心旋转而装卸于所述壳体。
36.在所述旋转刷的轴向另一侧可以设置有所述第二轴构件。所述第一轴构件可以插
入到所述第二轴构件并向所述第二轴构件传递旋转运动。
37.所述第一轴构件可以包括轮毂和复数个第一传递部。
38.所述第一轴构件可以以所述轮毂为中心旋转。所述第一传递部可以以所述第一轴构件的旋转轴为中心形成轴对称。
39.一个所述第一传递部可以形成第一面、第三面以及第五面。
40.所述第一面可以是将所述第一轴构件的旋转力传递到所述第二轴构件的面。
41.所述第一面可以以所述第一轴构件的旋转轴为中心形成螺旋形。沿所述旋转刷的旋转轴方向,所述第一面可以逐渐位于所述第一轴构件的旋转方向。所述第一面可以以所述轮毂为轴形成轴对称。
42.所述第三面可以是接收所述旋转刷的旋转惯性的面。
43.所述第三面可以形成与所述旋转刷的轴向平行的平面。所述第三面可以以所述第一轴构件的旋转轴为中心形成轴对称。
44.沿所述旋转刷的旋转轴方向,所述第三面的面积可以逐渐减小。沿所述旋转刷的旋转轴方向,所述第三面可以逐渐位于靠近所述旋转刷的旋转轴的位置。
45.所述第五面可以是连接所述第一面和所述第三面的面。所述第五面可以在所述第一轴构件的旋转轴的圆周方向上将所述第一面与所述第五面连接。
46.所述第五面可以以所述第一轴构件的旋转轴为中心形成轴对称。沿所述旋转刷的旋转轴方向,所述第五面的面积可以逐渐减小。沿所述旋转刷的旋转轴方向,所述第五面可以逐渐位于靠近所述旋转刷的旋转轴的位置。
47.所述第二轴构件可以包括轴体和复数个第二传递部。
48.所述轴体可以插入到主体的一侧开口内。如果所述第一轴构件插入到所述第二轴构件内,则一个所述第二传递部可以插入到邻近的所述第一面和所述第三面之间。所述第二传递部可以以所述第一轴构件的旋转轴为中心形成轴对称。
49.一个所述第二传递部可以形成所述第二面和所述第四面。
50.所述第二面能够以所述第一轴构件的旋转轴为中心形成螺旋形。所述第二面能够以所述轴体为轴形成轴对称。
51.沿所述旋转刷的旋转轴方向,所述第二面可以逐渐位于所述第一轴构件的旋转方向。沿所述旋转刷的旋转轴方向,所述第二面可以逐渐位于靠近所述旋转刷的旋转轴的位置。
52.所述第二面可以是接收所述第一轴构件的旋转力的面。
53.如果所述第一轴构件插入到所述第二轴构件内,则所述第二面和所述第一面可以沿轴向形成螺旋形的所述第一接触面。所述第一轴构件的旋转力可以从第一接触面传递到所述第二轴构件。
54.所述第一接触面可以以所述旋转刷的旋转轴为中心彼此轴对称。沿所述旋转刷的旋转轴方向,所述第一接触面可以逐渐位于所述第一轴构件的旋转方向。
55.沿所述旋转刷的旋转轴方向,所述第一面的面积可以逐渐减小。因此,沿所述旋转刷的旋转轴方向,所述第一接触面的面积可以逐渐减小。
56.沿所述旋转刷的旋转轴方向,所述第一面和所述第二面可以逐渐位于靠近所述旋转刷的旋转轴的位置。因此,沿旋转刷的旋转轴方向,所述第一接触面可以逐渐位于靠近所
述旋转刷的旋转轴的位置。
57.所述第四面是可以将所述旋转刷的旋转惯性传递到所述第一轴构件的面。
58.如果将所述第一轴构件插入到所述第二轴构件内,则所述第四面和所述第三面可以形成与轴向平行的复数个第二接触面。
59.第二接触面可以以所述旋转刷的旋转轴为中心彼此轴对称。
60.沿旋转刷的旋转轴方向,所述第四面可以逐渐位于靠近所述旋转刷的旋转轴的位置。所述第四面可以形成与所述旋转刷的轴向平行的平面。
61.如果所述第一轴构件在螺旋形的所述第一接触面上沿所述旋转刷的轴向推动所述第二轴构件,则所述第一轴构件和所述第二轴构件可以在保持所述第一接触面的状态下在轴向上隔开。
62.沿所述旋转刷的旋转轴的方向,所述第一面和所述第二面可以逐渐位于所述第一轴构件的旋转方向。以一个所述第一传递部为基准,沿所述旋转刷的旋转轴方向,所述第一面和所述第三面可以逐渐靠近。
63.以一个所述第二传递部为基准,沿所述旋转刷的旋转轴方向,所述第二面和所述第四面可以逐渐靠近。因此,如果所述第一轴构件通过所述第一接触面沿所述旋转刷的旋转轴方向推动所述第二轴构件,则第二接触面可以被去除。
64.所述轴体可以形成所述第六面。如果所述第一轴构件插入到所述第二轴构件,则所述第六面可以与所述第五面形成接触面。
65.所述第五面和所述第六面可以用作边界面,用于抑制由于沿所述第一轴构件的旋转轴的径向传递的外力而导致的所述第一轴构件和所述第二轴构件的相对游动。
66.技术效果
67.根据本发明的实施例,第一轴构件和第二轴构件形成复数个第一接触面,第一接触面以旋转刷的轴为中心形成螺旋形,由此,第一轴构件的旋转力不仅用于使旋转刷旋转,而且还用于沿轴向推动旋转刷,即使旋转刷受到地面的反作用力和摩擦力的作用,也能够使旋转刷的轴向游动最小化。
68.根据本发明的实施例,第一轴构件和第二轴构件形成复数个第二接触面,第二接触面形成与旋转刷的轴向平行的平面,由此,当旋转刷受到径向外力时,第一轴构件和第二轴构件在第二接触面上紧密接触,从而能够阻止旋转刷的径向游动。
69.根据本发明的实施例,第一接触面以旋转刷的轴为中心形成螺旋形,第二接触面与旋转刷的轴向平行,由此,如果使刷子模块沿旋转刷的旋转轴方向移动,则第二轴构件和第一轴构件能够容易地咬合或解除咬合。
附图说明
70.图1是本发明一实施例的真空吸尘器的立体图。
71.图2是从上方观察图1的真空吸尘器的吸入管嘴的立体图。
72.图3是从下方观察图1的真空吸尘器的吸入管嘴的立体图。
73.图4是图2的吸入管嘴的分解立体图。
74.图5是图2的吸入管嘴的剖视图。
75.图6是从上方观察图4的吸入管嘴的安装壳体和连接器的分解立体图。
76.图7是从下方观察图4的吸入管嘴的安装壳体和连接器的分解立体图。
77.图8是示出图4的吸入管嘴的安装壳体和连接器的组装状态的立体图。
78.图9是示出图4的吸入管嘴的本体壳体、安装壳体以及连接器的组装状态的立体图。
79.图10是示出图4的吸入管嘴的本体壳体、安装壳体以及连接器的组装状态的局部剖视图。
80.图11是示出图5的本体壳体和驱动部的局部分解立体图。
81.图12是图11的驱动部的分解立体图。
82.图13是图11的驱动部的侧视图。
83.图14是图2的吸入管嘴的仰视图。
84.图15是图14的吸入管嘴的a-a
′
剖视图。
85.图16是示出图4的刷子模块的立体图。
86.图17是图16的刷子模块的分解立体图。
87.图18是示出刷子模块从图2的吸入管嘴分离的状态的立体图。
88.图19是示出图2的吸入管嘴中的壳体和装卸盖的结合状态的立体图。
89.图20是示出图2的吸入管嘴中的壳体和装卸盖的分离状态的立体图。
90.图21是图18的吸入管嘴中未图示刷子构件的立体图。
91.图22是示出图21的吸入管嘴中的按压按钮被分离的状态的立体图。
92.图23是示出图21的装卸盖的立体图。
93.图24是图20的吸入管嘴的侧视图。
94.图25是示出图19的吸入管嘴中的按压按钮被按压的状态的侧视图。
95.图26是图19的吸入管嘴的侧视图。
96.图27是示出图19的吸入管嘴的刷子模块和驱动部的立体图。
97.图28是示出图27的驱动部的侧视图。
98.图29是示出图28的第一轴构件的立体图。
99.图30是示出图27的刷子模块的侧视图。
100.图31是示出图30的第二轴构件的局部立体图。
101.图32是图19的吸入管嘴的剖视图。
102.图33是图32的b-b
′
剖视图。
103.图34是图32的c-c
′
剖视图。
104.图35是图32的d-d
′
剖视图。
105.图36是表示作用于第一接触面的力的图。
106.图37是表示传递到第二面的力的图。
107.图38是表示作用于第二接触面的力的图。
108.附图标记说明
109.1:真空吸尘器
110.20:本体
111.21:把手
112.22:灰尘桶
113.30:延长管
114.10:吸入管嘴
115.100:壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300:刷子模块
116.101:吸入空间
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
310:旋转刷
117.102:隔离空间
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311:主体
118.110:本体壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311a:凸出部
119.110a:前方部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
312:刷子构件
120.110h:a孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
313:第二轴构件
121.111:入口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
313a:轴体
122.111a:第七边界面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
313b:第二传递部
123.112:导轨(第一凸起)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
313b1:第二面
124.112a:第一壁部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
313b2:第四面
125.112b:第二壁部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
313a1:第六面
126.113:第二凸起
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
313b3:第七面
127.120:下部壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
314:第三轴构件
128.121:第一下部壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
320:装卸盖
129.121a:第一壁面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
321:盖体
130.121b:第二壁面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
322:轮毂
131.122:第二下部壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
323:凸出筋
132.130:安装壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
324:第一凸起
133.131:盖部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
325:引导槽(第二凸起)
134.132:安装部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
326:第三凸起
135.133:夹设部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
326a:倾斜面
136.133a:第四边界面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
326b:卡合面
137.133b:第六边界面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
327:第四凸起
138.140:支撑壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
400:连接器
139.141:按压按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
401:通路
140.141a:按钮部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
410:插入部
141.141b:弹性构件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
411:卡合槽
142.141c:第一阻止部(第三凸起)
ꢀꢀꢀꢀꢀꢀꢀꢀ
420:第一连接部
143.141d:第二阻止部(第四凸起)
ꢀꢀꢀꢀꢀꢀꢀꢀ
421:第二边界面
144.141e:轴部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
430:第二连接部
145.141h1:第一安装槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
431:装卸按钮
146.141h2:第二安装槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
432:卡合部
147.141h3:第三安装槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
440:结合部
148.141h4:轴槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
441:管部
149.150:侧面盖
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
441a:卡合部
150.200:驱动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
442:凸出部
151.210:支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
442a:第一边界面
152.220:马达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
442b:第三边界面
153.230:传动装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
442c:第五边界面
154.231:第一传送带传动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
442d:第八边界面
155.231a:主动滑轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
443:隔开凸出部
156.231b:第一中间滑轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
450:伸缩管
157.231c:第一传送带
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
451:伸缩软管
158.232:第二传送带传动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
452:螺旋弹簧
159.232a:从动滑轮
160.232b:第二中间滑轮
161.232c:第二传送带
162.232d:第一轴构件
163.232da:轮毂
164.232db:第一传递部
165.232d1:第一面
166.232d2:第三面
167.232d3:第五面
168.c1:第一接触面
169.c2:第二接触面
具体实施方式
170.以下,将参照附图对本发明的优选实施例进行详细说明。但是,在说明本发明时,为了阐明本发明的主旨,将省略对已知功能或结构的说明。
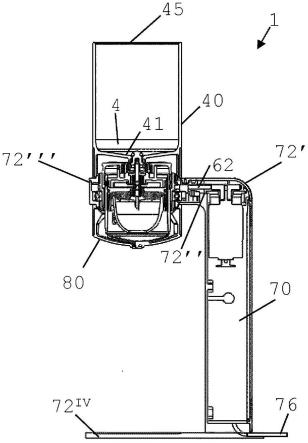
171.图1是本发明一实施例的真空吸尘器1的立体图。
172.如图1所示,本发明一实施例的真空吸尘器1包括本体20和吸入管嘴10。
173.吸入管嘴10通过延长管30与本体20连接。吸入管嘴10也可以与本体20直接连接。用户可以在抓握本体20上形成的把手21的状态下,使放置在地面上的吸入管嘴10前后移动。
174.本体20是形成空气的压力差的结构。在本体20的内部设置有送风机。当送风机形成空气的压力差时,地面上的灰尘和杂质通过吸入管嘴10的入口111和延长管30向本体20移动。
175.在本体20的内部可以设置有离心分离式集尘装置。灰尘和杂质可以容纳于灰尘桶22。
176.图2是从上方观察图1的真空吸尘器1的吸入管嘴10的立体图。图3是从下方观察图1的真空吸尘器1的吸入管嘴10的立体图。图4是图2的吸入管嘴10的分解立体图。
177.吸入管嘴10是利用空气的压力差来吸入地面上的灰尘的结构。吸入管嘴10包括:壳体100、驱动部200、刷子模块300以及连接器400。
178.以下,为了本发明的理解上的便利,将旋转刷310侧称为吸入管嘴10的前方、前侧,将连接器400侧称为吸入管嘴10的后方、后侧。
179.吸入管嘴10的组装顺序如下。首先,组装连接器400。接着,将连接器400与安装壳
体130组装到一起。
180.安装壳体130以能够旋转的方式安装于连接器400。之后,将驱动部200结合到本体壳体110的一侧面。
181.然后,将安装壳体130结合到本体壳体110的上部。接着,将下部壳体120结合到本体壳体110的下部。接着,将支撑壳体140结合到本体壳体110的下部。
182.然后,将按压按钮141安装到支撑壳体140。接着,将侧面盖150结合到本体壳体110的一侧侧面。
183.最后,将第一轴构件232d插入旋转刷310的第二轴构件313,将装卸盖320可装卸地结合到本体壳体110的另一侧面。由此,吸入管嘴10的组装完成。
184.图5是图2的吸入管嘴10的剖视图。
185.如图4和图5所示,壳体100是将地面上的灰尘和杂质引导到连接器400的通路401的结构。
186.壳体100包括:本体壳体110、下部壳体120、安装壳体130以及支撑壳体140。
187.本体壳体110形成使灰尘向本体20移动的入口111。入口111形成在本体壳体110的后侧。入口111形成圆筒形态。在本体壳体110的前侧安装有旋转刷310。
188.本体壳体110的前侧(以下,“前方部110a”)形成包围旋转刷310的上部的形态。前方部110a以旋转刷310的旋转轴为中心形成沿圆周方向延长的壁面。前方部110a与旋转刷310的上部隔开预定间隔。
189.旋转刷310在驱动部200的作用下旋转。旋转刷310将地面上的灰尘和杂质推向后侧。被推向旋转刷310的后侧的灰尘和杂质容易进入到入口111。本体壳体110在旋转刷310和入口111之间覆盖地面上部。
190.在旋转刷310和入口111之间,壳体100与地面之间形成空间(以下,“吸入空间101”)。除壳体100与地面之间的间隙以外,吸入空间101与外部隔绝。吸入空间101的灰尘和杂质通过入口111进入通路401。
191.如图4和图5所示,下部壳体120与本体壳体110一起形成吸入空间101。下部壳体120包括第一下部壳体121和第二下部壳体122。
192.第一下部壳体121和第二下部壳体122在旋转刷310和入口111之间形成向入口111侧引导吸入空间101的灰尘和杂质的壁面。
193.下部壳体120与支撑壳体140一起利用螺栓结合到本体壳体110的下部。本体壳体110形成有供螺栓螺纹结合的紧固部n。第一下部壳体121、第二下部壳体122以及支撑壳体140形成有用于插入螺栓的插入部t。
194.第一下部壳体121包括第一壁面121a和第二壁面121b。
195.第一壁面121a的上部紧贴于前方部110a的后端。第一壁面121a的正面与刷子构件312接触。当刷子构件312旋转时,贴附于刷子构件312的灰尘和杂质可以与第一壁面121a的下部碰撞而从刷子构件312脱离。
196.第二壁面121b和第二下部壳体122在入口111的左右侧和底面之间形成将吸入空间101的灰尘和杂质引导至入口111侧的壁面。在第二下部壳体122安装有一对第一轮子w1。
197.图6是从上方观察图4的吸入管嘴10的安装壳体130和连接器400的分解立体图。图7是从下方观察图4的吸入管嘴10的安装壳体130和连接器400的分解立体图。
198.如图6和图7所示,安装壳体130包括:盖部131、安装部132以及夹设部133。
199.盖部131是安装在本体壳体110的上部的部分。在盖部131和本体壳体110中的任一方形成有凸起p。在盖部131和本体壳体110中的另一方形成有孔h。随着凸起p插入到孔h,盖部131被安装到本体壳体110的上部。
200.安装部132是包围入口111和结合部440的部分。安装部132形成环形。
201.夹设部133从安装部132的内表面凸出。夹设部133是以能够旋转的方式安装于连接器400的部分。夹设部133从安装部132的内表面沿圆周方向凸出。
202.如图4和图5所示,支撑壳体140是支撑吸入管嘴10和连接器400的下部的结构。
203.在支撑壳体140安装有第二轮子w2。第二轮子w2与一对第一轮子w1一同旋转并在地面上滚动。
204.一对的第一轮子w1和第二轮子w2向吸入管嘴10和连接器400提供滚动运动。在支撑壳体140安装有按压按钮141。
205.连接器400是能够使本体20和吸入管嘴10进行相对旋转的结构。另外,连接器400在其内部形成供灰尘向本体20移动的通路401。
206.如图6和图7所示,连接器400包括:插入部410、第一连接部420、第二连接部430、结合部440以及伸缩管450。
207.第一连接部420和第二连接部430分别形成管形状。第一连接部420和第二连接部430以能够旋转的方式结合。
208.虽然并未图示,但是在第一连接部420和第二连接部430中的任一方形成有一对凸起。并且,在第一连接部420和第二连接部430中的另一方形成有一对槽。
209.一对凸起可以分别形成在第二连接部430的两侧外侧面。并且,一对槽可以分别形成在第一连接部420的两侧内侧面。凸起分别插入到槽中。第二连接部430可以将槽中插入的凸起作为旋转轴进行旋转。图6的x表示由凸起形成的旋转轴的延长线。
210.如图5所示,在第二连接部430的上部形成有装卸按钮431。装卸按钮431与卡合部432连接。在第二连接部430的上部形成有孔。卡合部432通过孔凸出到第二连接部430的内部。
211.在延长管30形成有用于插入卡合部432的孔。延长部30的移动被卡合部432阻止。
212.当按压装卸按钮431时,卡合部432上升并从延长管30的孔脱离。因此,第二连接部430和延长管30分离。当去除施加到装卸按钮431的外力时,装卸按钮431因自身弹性而再次升高。当去除施加到装卸按钮431的外力时,卡合部432再次下降。
213.如图5所示,伸缩管450在入口111和第二连接部430之间形成通路401。伸缩管450(pipe)包括伸缩软管451(tube)以及螺旋弹簧452。
214.伸缩软管451在其内部形成有通路401。伸缩软管451形成圆筒形态。伸缩软管451由软质的树脂制成。因此,伸缩软管451在第一连接部420和第二连接部430的相对旋转以及安装部132和第一连接部420的相对旋转时弹性变形。
215.螺旋弹簧452贴附于伸缩软管451的内表面或外表面。螺旋弹簧452保持伸缩软管451的圆筒形态。
216.螺旋弹簧452以被压缩的状态安装在入口111和第二连接部430之间。在入口111和第二连接部430分别形成有用于卡住螺旋弹簧452两侧端部的凸台。
217.入口111和第二连接部430的两侧凸台之间的距离在第一连接部420和第二连接部430的相对旋转以及安装部132和第一连接部420的相对旋转时变化。
218.伸缩软管451在第一链接部420和第二连接部430的相对旋转以及安装部132和第一连接部420的相对旋转时,在螺旋弹簧452的弹性作用下保持紧贴于入口111和第二连接部430的两侧凸台的状态。
219.图8是示出图4的吸入管嘴10的安装壳体130和连接器400的组装状态的立体图。图9是示出图4的吸入管嘴10的本体壳体110、安装壳体130以及连接器400的组装状态的立体图。
220.图10是示出图9的吸入管嘴10的本体壳体110、安装壳体130以及连接器400的组装状态的局部剖视图。
221.插入部410形成具有小于第一连接部420的直径的管形态。插入部410利用螺栓结合于第一连接部420的内部。在第一连接部420形成有供螺栓螺纹结合的紧固部n。在插入部410形成有用于插入螺栓的插入部t。
222.插入部410从第一连接部420内部向前侧凸出。第一连接部420的前侧的面形成包围插入部410的环形态。
223.结合部440以能够以插入部410为中心旋转的方式连接安装壳体130和连接器400。结合部440约束安装部132和夹设部133相对于第一连接部420的前后方向游动。换言之,结合部440约束插入部410和第一连接部420相对于夹设部133的前后方向游动。
224.在插入部410插入到安装部132的内侧之后,结合部440被安装在插入部410的外表面。然后,伸缩管450插入到插入部410的内侧。接着,盖部131被安装在本体壳体110的上部。
225.如果盖部131被安装在本体壳体110的上部,则插入部410插入到入口111的内侧。第一连接部420在通路401方向上与入口111隔开。“通路401方向”应该被理解为与“插入部410的中心轴方向”相同的方向。
226.如图7和图10所示,结合部440包括:管部441、凸出部442以及隔开凸出部443。
227.管部441形成圆筒形态。如果将结合部440安装到插入部410的外表面,则管部441的内表面包围插入部410的外表面。然后,如果将盖部131安装到本体壳体110的上部,则入口111的内表面包围管部441的外表面。
228.隔开凸出部443在管部441的外表面沿圆周方向凸出。管部441通过隔开凸出部443与入口111的内表面隔开。隔开凸出部443也与入口111的内表面隔开。
229.当外力作用于连接器400时,隔开凸出部443可以与入口111的内表面接触。隔开凸出部443和入口111之间的接触面形成小于管部441的外表面的面积。因此,即使隔开凸出部443与入口111的内表面接触,安装壳体130和第一连接部420也能够进行相对旋转。
230.在现有文献1的真空吸尘器中,从第一连接构件接收外力的第二连接构件可以向第一连接构件的相反侧即外侧变形。因此,在现有文献1的真空吸尘器中,存在以能够旋转的方式结合的连接构件容易因作用于第一连接构件的外力而分离的问题。
231.在本发明的真空吸尘器1中,如果将结合部440安装到插入部410的外表面,则管部441的内表面包围插入部410的外表面。然后,如果将盖部131安装到本体壳体110的上部,则入口111的内表面包围管部441的外表面。
232.因此,当从插入部410接收外力的管部441向插入部410的相反侧即外侧变形时,入
口111的内表面形成阻止管部441的变形的边界面。
233.即,即使插入部410因作用于连接器400的外力而变形并向管部441传递外力,入口111也形成阻止管部441的变形的刚性。
234.因此,入口111抑制插入部410和结合部440的相对变形。其结果,在本发明的真空吸尘器1中,即使连接器400受到较强的外力作用,安装部132和第一连接部420也不分离。
235.如图7和图10所示,在插入部410和管部441中的任一方形成有卡合槽411。并且,在插入部410和管部441中的另一方形成有卡合部441a。作为一例,可以在管部441形成有卡合部441a,而在插入部410形成有卡合槽411。
236.卡合部441a向管部441的内侧凸出。卡合部441a越靠近后侧其向管部441的内侧凸出的高度越小。
237.当插入部410插入到结合部440的内侧时,卡合部441a因插入部410的外表面而向外侧弯曲变形。当卡合部441a插入到卡合槽411时,结合部440安装于插入部410的外表面。
238.卡合部441a在其前侧形成与通路401方向垂直的面。因此,即使向前侧拉动结合部440,卡合部441a也保持卡合于卡合槽411的状态。
239.在现有文献1的真空吸尘器中,以能够旋转的方式连接的连接构件彼此以过盈配合的方式结合。因此,在以修理真空吸尘器等为目的分离连接构件的过程中,存在连接构件在其以过盈配合的方式结合的部分磨损或损坏的问题。
240.在本发明的真空吸尘器1中,如果将卡合部441a从插入部410内侧推向外侧,则容易解除卡合部441a卡合于卡合槽411的状态。
241.如果在将卡合部441a从插入部410的内侧推向外侧的状态下向前侧拉动结合部440,则可以使插入部410和结合部440分离。因此本发明的真空吸尘器1具有能够在不被磨损或损坏的情况下简单地分离安装壳体130和第一连接部420的优点。
242.如图7和图10所示,凸出部442从管部441的外表面沿圆周方向凸出。凸出部442形成第一边界面442a。
243.第一连接部420形成第二边界面421。第二边界面421与第一边界面442a在通路401方向上隔开。
244.当结合部440被安装到插入部410的外表面时,夹设部133设置在第一边界面442a和第二边界面421之间。第一边界面442a和第二边界面421约束夹设部133在通路401方向上的移动。
245.第一边界面442a和第二边界面421以插入部410的中心轴为中心形成环形态。第一边界面442a和第二边界面421a在插入部410的中心轴方向上彼此面对。因此,安装壳体130以能够以插入部410的中心轴为中心旋转的方式安装于连接器400。
246.凸出部442形成第三边界面442b。第三边界面442b形成在凸出部442的径向外表面。第三边界面442b以插入部410的中心轴为中心沿圆周方向具有预定的半径。第一边界面442a和第三边界面442b可以形成约90度的夹角。
247.夹设部133形成第四边界面133a。安装部132形成圆形环形态。夹设部133以安装部132的中心轴为中心沿圆周方向形成第四边界面133a。第二边界面421和第四边界面133a可以形成约90度的夹角。
248.第三边界面442b和第四边界面133a在管部441的径向上彼此面对。第三边界面
442b和第四边界面133a在插入部410的径向游动时彼此紧贴。因此,第三边界面442b和第四边界面133a约束插入部410相对于安装部132的径向游动。
249.凸出部442形成第五边界面442c。第五边界面442c形成在凸出部442的径向外表面。
250.第三边界面442b以插入部410的中心轴为中心沿圆周方向具有预定的半径。第三边界面442b和第五边界面442c形成台阶。第一边界面442a和第五边界面442c可以形成约90度的夹角。
251.第六边界面133b形成在安装部132的内表面。安装部132的内表面形成圆形环形态。安装部132以中心轴为中心沿圆周方向形成第六边界面133b。
252.第四边界面133a和第六边界面133b形成台阶。第二边界面421和第六边界面133b可以形成约90度的夹角。
253.第五边界面442c和第六边界面133b在管部441的径向上彼此面对。第五边界面442c和第六边界面133b在插入部410的径向游动时彼此紧贴。因此,第五边界面442c和第六边界面133b约束插入部410相对于安装部132的径向游动。
254.入口111的背面形成第七边界面111a。第七边界面111a以入口111的中心轴为中心形成环形态。
255.凸出部442的正面形成第八边界面442d。第八边界面442d以管部441的中心轴为中心形成环形态。第八边界面442d与第七边界面111a在通路401方向上隔开。
256.当结合部440被安装到插入部410的外表面时,入口111的背面和凸出部442的正面在管部441的径向上彼此面对。因此,第七边界面111a和第八边界面442d约束本体壳体110和第一连接部420在通路401方向上的移动。
257.整理上述的边界面的作用如下。
258.①
第一边界面442a和第二边界面421能够以插入部410的中心轴为中心实现壳体100和连接器400之间的相对旋转。
259.②
第一边界面442a和第二边界面421约束壳体100和连接器400之间在通路401方向上的相对移动。
260.③
第七边界面111a和第八边界面442d约束壳体100和连接器400之间在通路401方向上的相对移动。
261.④
第三边界面442b和第四边界面133a约束壳体100和连接器400之间在径向上的相对移动。
262.⑤
第五边界面442c和第六边界面133b约束壳体100和连接器400之间在径向上的相对移动。
263.现有文献1的真空吸尘器存在的问题在于,当第一连接构件旋转时,摩擦力集中于第一连接构件和第二连接构件的接触面。摩擦力集中将促进部件的磨损。
264.在本发明的真空吸尘器1中,壳体100和连接器400之间的相对旋转受
①
的作用。壳体100和连接器400在通路401方向上的相对移动受
②
和
③
的作用而被双重约束。并且,壳体100和连接器400在径向上的相对移动受
④
和
⑤
的作用而被双重约束。
265.即,当第一连接部420以插入部410的中心轴为中心旋转时,摩擦力分别分散到第一边界面442a和第二边界面421、第三边界面442b和第四边界面133a、第五边界面442c和第
六边界面133b、第七边界面111a和第八边界面442d。
266.因此,本发明的真空吸尘器1的优点在于,当第一连接部420以插入部410的中心轴为中心旋转时,阻止摩擦力集中,从而抑制部件的磨损。
267.图11是示出图5的本体壳体110和驱动部200的局部分解立体图。图12是图11的驱动部200的分解立体图。图13是图11的驱动部200的侧视图。
268.驱动部200是使旋转刷310旋转的结构。驱动部200与本体壳体110的一侧侧面(以下“左侧面”)结合。如图4所示,侧面盖150覆盖驱动部200。侧面盖150利用卡钩等卡合结合于壳体100的左侧面。在侧面盖150形成有供空气进出的孔。
269.如图11所示,驱动部200包括:支架210、马达220以及传动装置230。
270.支架210利用螺栓结合于本体壳体110。支架210遮蔽本体壳体110的左侧面。在本体壳体110的左侧面形成有供螺栓螺纹结合的复数个紧固部n。在支架210形成有用于插入螺栓的复数个插入部t。
271.马达220是产生旋转力的结构。马达220可以构成为bldc马达(brushless direct current motor,无刷直流马达)。马达220结合于支架210。当支架210结合于本体壳体110时,马达220位于旋转刷310的后方。马达220的旋转轴可以与旋转刷310的旋转轴平行。
272.如图12和图13所示,传动装置230是将马达220的旋转运动传递给旋转刷310的结构。传动装置230安装于支架210。传动装置230包括第一传送带传动部231和第二传送带传动部232。
273.第一传送带传动部231是将马达220的旋转运动传递给中间滑轮r的结构。当支架210结合到本体壳体110时,中间滑轮r配置在马达220和旋转刷310之间。中间滑轮r的轴可以与旋转刷310的旋转轴平行。
274.在支架210结合有固定轴a。中间滑轮r通过轴承b以能够旋转的方式安装于固定轴a。在固定轴a形成有槽。在槽安装有卡环s,用于阻止中间滑轮r的脱落。
275.中间滑轮r包括第一中间滑轮231b和第二中间滑轮232b。第一中间滑轮231b和第二中间滑轮232b同时旋转。第一中间滑轮231b和第二中间滑轮232b可以被制成一体。
276.如齿轮那样,在第一中间滑轮231b和第二中间滑轮232b的外表面形成有等间隔的槽。即,如齿轮那样,在第一中间滑轮231b和第二中间滑轮232b的外表面形成有齿牙(tooth)。第一中间滑轮231b的齿牙数量多于第二中间滑轮232b的齿牙数量。
277.如图12和图13所示,第一传送带传动部231包括:主动滑轮231a、第一中间滑轮231b以及第一传送带231c。
278.第一传送带传动部231与旋转刷310隔开。即,主动滑轮231a、第一中间滑轮231b以及第一传送带231c以支架210为基准位于旋转刷310的相反侧。
279.主动滑轮231a结合于马达220的轴。如齿轮那样,在主动滑轮231a的外表面形成有齿牙(tooth)。第一中间滑轮231b的齿牙数量多于主动滑轮231a的齿牙数量。
280.第一传送带231c缠绕于主动滑轮231a和第一中间滑轮231b。第一传送带231c以开口带(平衡架)的方式缠绕于主动滑轮231a和第一中间滑轮231b。因此,第一传送带231c将主动滑轮231a的旋转运动以相同的旋转方向传递给第一中间滑轮231b。
281.第一传送带231c构成为正时皮带(timing belt)。因此,第一传送带231c可以将主动滑轮231a的旋转运动准确地传递给第一中间滑轮231b。
282.如上所述,第一中间滑轮231b的齿牙数量多于主动滑轮231a的齿牙数量。因此,第一中间滑轮231b的旋转力(torque)大于主动滑轮231a的旋转力。并且,第一中间滑轮231b的旋转速度慢于主动滑轮231a的旋转速度。
283.第二传送带传动部232是将中间滑轮r的旋转运动传递给旋转刷310的结构。第二传送带传动部232包括:从动滑轮232a、第二中间滑轮232b、第二传送带232c以及第一轴构件232d。
284.第二传送带传动部232与旋转刷310隔开。即,从动滑轮232a、第二中间滑轮232b以及第二传送带232c以支架210为基准位于旋转刷310的相反侧。
285.但是,第一轴构件232d插入到旋转刷310的内部。与马达220的容量无关地,第一轴构件232d的直径可以在不超过旋转刷310的直径的范围内多样地选择。
286.从动滑轮232a以能够旋转的方式安装于支架210。在支架210上形成有孔。在孔中安装有轴承b。从动滑轮232a的轴以能够旋转的方式结合于轴承b。从动滑轮232a的轴穿过支架210。从动滑轮232a的轴与旋转刷310的旋转轴平行。
287.第一轴构件232d是将从动滑轮232a的旋转运动传递给旋转刷310的结构。在旋转刷310的旋转轴方向的一侧设置有第二轴构件313。
288.以下,为了本发明的理解上的便利,将旋转刷310的旋转轴方向称为“轴向”。
289.第一轴构件232d插入到第二轴构件313,从而将旋转运动传递给第二轴构件313。第一轴构件232d的旋转轴和旋转刷310的旋转轴位于同一条线上。
290.第一轴构件232d在从动滑轮232a的相反侧与从动滑轮232a的轴结合。当支架210结合到本体壳体110时,第一轴构件232d配置在本体壳体110的内部。如图11所示,在本体壳体110的左侧面形成有用于插入第一轴构件232d的孔110h。
291.如齿轮那样,在从动滑轮232a的外表面形成有齿牙(tooth)。从动滑轮232a的齿牙数量多于第二中间滑轮232b的齿牙数量。
292.第二传送带232c缠绕于从动滑轮232a和第二中间滑轮232b。第二传送带232c以开口带(平衡架)的方式缠绕于从动滑轮232a和第二中间滑轮232b。
293.第二传送带232c将第二中间滑轮232b的旋转运动以相同的旋转方向传递给从动滑轮232a。因此,马达220的旋转方向与第一轴构件232d的旋转方向相同。
294.第二传送带232c构成为正时皮带(timing belt)。因此,第二传送带232c可以将第二中间滑轮232b的旋转运动准确地传递给从动滑轮232a。
295.如上所述,从动滑轮232a的齿牙数量多于第二中间滑轮232b的齿牙数量。因此,从动滑轮232a的旋转力(torque)大于第二中间滑轮232b的旋转力。并且,从动滑轮232a的旋转速度慢于第二中间滑轮232b的旋转速度。
296.其结果,第一轴构件232d的旋转速度慢于马达220的旋转速度,第一轴构件232d的旋转力大于马达220的旋转力。旋转刷310以较强的旋转力旋转,并使地面上的灰尘和杂质向吸入空间101移动。
297.图14是图2的吸入管嘴10的仰视图。图15是图14的吸入管嘴10的a-a
′
剖视图。
298.如图13和图14所示,当支架210结合到本体壳体110时,马达220位于旋转刷310的后方。马达220的旋转运动传递到被第一传送带传动部231和第二传送带传动部232隔开的位置的旋转刷310。
299.中间滑轮r的位置可以根据马达220和旋转刷310的间隔进行选择。另外,第一传送带231c的长度可以根据主动滑轮231a和第一中间滑轮231b的间隔和直径进行选择。并且,第二传送带232c的长度可以根据从动滑轮232a和第二中间滑轮232b的间隔和直径进行选择。
300.真空吸尘器1的结构元件可以根据真空吸尘器1的用途具有多样的规格。同样地,根据真空吸尘器1的用途,马达220的容量、旋转刷310的直径以及材质也可以是多样的。
301.作为一例,与家庭用真空吸尘器相比,商用真空吸尘器的马达的容量和旋转刷的直径更大。旋转刷的材质也可以根据真空吸尘器的用途而在金属、合成树脂中选择。
302.但是,在现有文献1的真空吸尘器中,选择马达时必须要考虑旋转刷的直径。因此存在无法将马达的容量提高到所需的水准的问题。
303.另一方面,在家庭用真空吸尘器中,吸入管嘴的高度越低,在实用性方面越有利。这是因为,高度较低的吸入管嘴也可以容易进入高度较低的空间。
304.但是,在现有文献1的真空吸尘器中,选择旋转刷的直径时必须要考虑马达的大小和形态。因此存在无法将旋转刷的直径缩减到所需的水准的问题。
305.在本发明的真空吸尘器1中,驱动部200位于旋转刷310的外部。因此具有能够与马达220的大小和形态无关地选择旋转刷310的直径的优点。
306.另外,本发明的真空吸尘器1具有能够与旋转刷310的直径无关地选择马达220的容量的优点。
307.如果使吸入管嘴10前后移动,则惯性沿移动方向作用于吸入管嘴10。在现有文献1的真空吸尘器中,吸入管嘴的重心偏向于吸入管嘴的前侧,因此在使吸入管嘴向前侧移动时,存在吸入管嘴的后侧因惯性而被提起的危险。
308.如果吸入管嘴向前方倾斜,则旋转清扫部与地面的摩擦力增加。旋转清扫部与地面之间的过大的摩擦力存在损坏地面的危险。
309.在本发明的真空吸尘器1中,驱动部200位于旋转刷310的后方。因此,与现有文献1的真空吸尘器1相比,吸入管嘴10整体的重心位于更靠向后侧的位置。因此,在本发明的真空吸尘器1中,在使吸入管嘴10前后移动的过程中,吸入管嘴10向前倾斜的危险降低。
310.如果吸入管嘴10的荷重较重,则真空吸尘器1的使用性降低。在直立式真空吸尘器中,壳体的轮子和旋转刷与地面摩擦。像老弱者或小孩这样力气小的用户可能无法顺畅地移动直立式(uplight type)真空吸尘器。
311.因此,直立式真空吸尘器要求减少吸入管嘴的荷重。但是,现有的真空吸尘器主要使用由复数个部件构成的二级行星齿轮组。
312.在本发明的真空吸尘器1中,马达220的旋转运动通过第一传送带传动部231和第二传送带传动部232传递至旋转刷310。传送带传动通过简单的滑轮-传送带结构来传递旋转运动。因此,与二级行星齿轮套件相比,传动装置230具有大幅减少部件数量和荷重的优点。
313.如图15所示,安装壳体130与本体壳体110、下部壳体120以及支架210一同形成隔离空间102。隔离空间102表示与吸入空间101隔离的空间。隔离空间102位于旋转刷310的后方。吸入空间101的灰尘和杂质无法进入隔离空间102。
314.当支架210与本体壳体110结合时,在隔离空间102内设置有马达220。另外,第一传
送带传动部231和第二传送带传动部232利用支架210与吸入空间101隔离。因此,即使没有将驱动部200插入到旋转刷310的内部,也能够阻止灰尘和杂质对驱动部200的污染。
315.旋转刷310与地面摩擦,并且温度升高。在现有文献1的真空吸尘器1中,马达220和齿轮部位于旋转刷310的内部。因此,现有文献1的真空吸尘器1存在马达和齿轮部的热能排放缓慢的问题。马达和齿轮部的温度上升直接关系到马达和齿轮部的性能下降以及故障的发生。
316.在本发明的真空吸尘器1中,驱动部200与旋转刷310隔开。尤其,产生热能的马达220、滑轮、传送带位于与旋转刷310隔开的空间。本发明的真空吸尘器1具有通过支架210和壳体100快速地排出马达220、滑轮、传送带的热能的优点。
317.图16是示出图4的刷子模块300的立体图。图17是图16的刷子模块300的分解立体图。图18是示出刷子模块300从图2的吸入管嘴10分离的状态的立体图。
318.如图16和图17所示,刷子模块300包括旋转刷310和装卸盖320。
319.旋转刷310将地面上的灰尘和杂质推向后侧。旋转刷310包括:主体311、刷子构件312、第二轴构件313以及第三轴构件314。
320.主体311形成旋转刷310的骨架。主体311形成内部中空的圆筒形态。主体311的中心轴用作旋转刷310的中心轴。主体311沿圆周方向形成均匀的旋转惯性(rotational inertia)。主体311可以由合成树脂或金属材质制成。
321.刷子构件312贴附于主体311的外表面。刷子构件312包括复数根毛。当主体311旋转时,复数根毛使地面上的灰尘和杂质漂浮。复数根毛可以包括纤维毛以及金属毛。
322.纤维毛和金属毛可以随机地配置于主体311的外表面。纤维毛和金属毛可以直接贴附于主体311的外表面。虽然并未图示,在主体311的外表面上可以贴附有纤维层。并且,纤维毛和金属毛可以贴附于纤维层。
323.纤维毛可以由尼龙等合成树脂材质制成。金属毛包含导电物质而制成。金属毛可以通过在合成树脂材质的毛上涂敷导电物质来制造。
324.由纤维毛产生的静电可以通过金属毛向地面放电或除电。因此能够抑制静电传递给用户的现象。
325.如图16和图17所示,第二轴构件313是接收第一轴构件232d的旋转运动的结构。第二轴构件313设置在主体311的一侧开口内。第二轴构件313插入到主体311的一侧开口内。
326.在第二轴构件313的外表面形成有插入槽313h。在主体311的内表面沿长度方向形成有凸出部311a。当第二轴构件313插入到主体311的开口时,凸出部311a插入于插入槽313h。凸出部311a阻止第二轴构件313的相对旋转。
327.第二轴构件313形成用于插入第一轴构件232d的空间。当旋转刷310沿轴向移动时,第一轴构件232d插入到第二轴构件313内。
328.第一轴构件232d和第二轴构件313形成彼此咬合的复数个面。如果第一轴构件232d和第二轴构件313彼此咬合,则第一轴构件232d的旋转轴和第二轴构件313的旋转轴将位于同一条线上。
329.第一轴构件232d的旋转力通过接触面传递到第二轴构件313。在第一轴构件232d和第二轴构件313咬合的状态下,旋转刷310的旋转轴与第一轴构件232d的旋转轴位于同一条线上。
330.如图16和图17所示,第三轴构件314是将主体311以能够旋转的方式连接到装卸盖320的结构。第三轴构件314设置在主体311的另一侧开口内。第三轴构件314插入到主体311的另一侧开口内。
331.在第三轴构件314的外表面形成有插入槽314h。在主体311的内表面沿长度方向形成有凸出部311a。当第三轴构件314插入到主体311的开口时,凸出部311a插入于插入槽314h。凸出部311a阻止第三轴构件314的相对旋转。
332.在第三轴构件314安装有轴承b。在装卸盖320设置有固定轴a。轴承b以能够旋转的方式支撑固定轴a。在固定轴a形成有槽。在槽中安装有卡环s,以阻止固定轴a和第三轴构件314的分离。
333.装卸盖320以旋转刷310的旋转轴为中心旋转,从而可装卸地与壳体100结合。
334.图19是示出图2的吸入管嘴10中的壳体100和装卸盖320的结合状态的立体图。图20是示出图2的吸入管嘴10中的壳体100和装卸盖320的分离状态的立体图。
335.以下,为了本发明的理解上的便利,将装卸盖320结合于壳体100状态称为“结合状态”。并且,将装卸盖320以旋转刷310的旋转轴为中心旋转而与壳体100解除结合结构的状态称为“分离状态”。
336.在图20的分离状态下,当沿轴向拉动装卸盖320时,如图18所示,刷子模块300将从壳体100分离。
337.以下,为了本发明的理解上的便利,将装卸盖320与壳体100结合的旋转方向称为“第一旋转方向”。并且,将装卸盖320从壳体100分离的旋转方向称为“第二旋转方向”。
338.在图20的分离状态下,如果使装卸盖320向第一旋转方向旋转,则将达到如图19所示的结合状态。
339.图21是图18的吸入管嘴10中未图示旋转刷310的立体图。图22是示出图21的吸入管嘴10中的按压按钮141被分离的状态的立体图。图23是示出图21的装卸盖320的立体图。
340.如图21和图22所示,在本体壳体110的一侧侧面(以下,“右侧面”)形成有导轨112、复数个第一壁部112a、复数个第二壁部112b以及第二凸起113。
341.导轨112形成于本体壳体110的右侧面。导轨112以第一轴构件232d的旋转轴为中心沿圆周方向形成。
342.导轨112的外表面以第一轴构件232d的旋转轴为中心引导第一凸起324的旋转。第一凸起324可以被引导至导轨112的外表面,并沿第一旋转方向和第二旋转方向旋转。
343.第一壁部112a形成于导轨112的外表面。第一壁部112a从导轨112的外表面凸出。第一凸起324可以沿第一旋转方向旋转而进入到第一壁部112a和本体壳体110之间。此时,第一壁部112a阻止第一凸起324的轴向移动。
344.第二壁部112b形成于导轨112的外表面。第二壁部112b从导轨112的外表面凸出。第二壁部112b在结合状态下阻止第一凸起324的第一旋转方向旋转。
345.第二凸起113形成于本体壳体110的右侧面。第二凸起113从本体壳体110的右侧面凸出。在装卸盖320以固定轴a为中心大致沿圆周方向形成有引导槽325。
346.引导槽325的内表面以旋转刷310的旋转轴为中心引导第二凸起113的旋转。在结合状态和分离状态下,第二凸起113保持插入于引导槽325的状态。
347.如图21和图22所示,支撑壳体140安装有按压按钮141。按压按钮141选择性地阻止
装卸盖320的旋转。按压按钮141包括:按钮部141a、弹性构件141b、第一阻止部141c以及第二阻止部141d。
348.按钮部141a形成供用户按压的面。支撑壳体140形成有用于插入按钮部141a的第一安装槽141h1。
349.在按钮部141a形成有一对轴部141e。一对轴部141e分别形成于按钮部141a的两侧侧面。在第一安装槽141h1的内表面形成有一对轴槽141h4。一对轴槽141h4形成于第一安装槽141h1的两侧内侧面。
350.轴部141e插入到轴槽141h4。按钮部141a可以以插入到轴槽141h4的轴部141e为旋转轴进行旋转。
351.第一阻止部141c从按钮部141a延伸。第一阻止部141c是在结合状态下阻止第三凸起326的旋转的部分。
352.在支撑壳体140形成有第二安装槽141h2。第一阻止部141c的一部分插入到第二安装槽141h2。第一阻止部141c在第二安装槽141h2内以轴部141e为旋转轴进行旋转。
353.当用户按压按钮部141a时,按压按钮141以轴部141e为旋转轴进行旋转。此时,第一阻止部141c从第三凸起326的旋转路径脱离。
354.弹性构件141b设置在按钮部141a和壳体100之间。弹性构件141b在轴部141e和第一阻止部141c之间形成向外侧推动按钮部141a的力。
355.因此,如果去除施加到按钮部141a的外力,则第一阻止部141c将再次位于第三凸起326的旋转路径上。支撑壳体140形成有用于插入弹性构件141b的第三安装槽141h3。
356.第二阻止部141d从按钮部141a延伸。在结合状态下,第二阻止部141d阻止第四凸起327的轴向移动。在结合状态下,第四凸起327被第四阻止部阻止其轴向移动。
357.装卸盖320以能够旋转的方式支撑旋转刷310。装卸盖320以旋转刷310的旋转轴为中心旋转,从而可装卸地与壳体100结合。
358.如图21和图23所示,装卸盖320包括:盖体321、轮毂322、凸出筋323、第一凸起324、第三凸起326以及第四凸起327。
359.盖体321在结合状态下覆盖壳体100的右侧面。在盖体321形成有供空气进出的槽。
360.盖体321的边缘部形成与壳体100的右侧面的轮廓(profile)相似的轮廓。盖体321的边缘部朝壳体100的右侧面边缘凸出。盖体321的边缘部在结合状态下紧贴于壳体100的右侧面边缘。
361.轮毂322是供固定轴a结合的部分。固定轴a可以在注塑装卸盖320时插入到模具中。轮毂322形成于装卸盖320的内侧面。这里,内侧面表示朝向壳体100的面。
362.凸出筋323是使第一凸起324与装卸盖320的内侧面隔开预定间隔的部分。凸出筋323形成于装卸盖320的内侧面。凸出筋323以轮毂322为中心沿圆周方向形成。
363.在凸出筋323形成有复数个第一凸起324。第一凸起324从凸出筋323向轮毂322侧凸出。第一凸起324以固定轴a为中心沿圆周方向彼此隔开。
364.第一凸起324被凸出筋323与装卸盖320的内侧面隔开预定间隔。第一凸起324可以被引导至导轨112的外表面,并沿第一旋转方向和第二旋转方向旋转。
365.第三凸起326形成于装卸盖320的内侧面边缘。当将装卸盖320可装卸地结合于壳体100时,第三凸起326将被卡止于第一阻止部141c。第三凸起326比第一凸起324与固定轴a
更远地隔开。
366.第三凸起326形成倾斜面326a和卡合面326b。当装卸盖320以固定轴a为中心旋转时,第一阻止部141c将干涉第三凸起326的旋转。
367.当使装卸盖320沿第一旋转方向旋转时,倾斜面326a形成将第一阻止部141c推向中心轴侧的缓坡。第一阻止部141c可以仅被推向中心轴侧。因此,当使装卸盖320沿第一旋转方向旋转时,第一阻止部141c将被卡合面326b推动。
368.当使装卸盖320在结合状态下沿第二旋转方向旋转时,卡合面326b形成将第一阻止部141c推向大致垂直于中心轴侧的方向的面。第一阻止部141c可以仅被推向中心轴侧。因此,当使装卸盖320在结合状态下沿第二旋转方向旋转时,第一阻止部141c不被推动。
369.如果欲使装卸盖320在结合状态下沿第二旋转方向旋转,则用户需要通过按下按压按钮141来使第一阻止部141c从第三凸起326的旋转路径脱离。
370.第四凸起327形成于装卸盖320的内侧面边缘。第四凸起327位于比第三凸起326更靠第一旋转方向的前方的位置。在结合状态下,第四凸起327被第二阻止部141d阻止其轴向移动。在结合状态下,第四凸起327被支撑壳体140阻挡,从而其第一旋转方向上的旋转被阻止。
371.图24是图20的吸入管嘴10的侧视图。图25是示出图19的吸入管嘴10中的按压按钮141被按压的状态的侧视图。图26是图19的吸入管嘴10的侧视图。
372.将刷子模块300安装到壳体100的过程如下。
373.首先,沿轴向移动刷子模块300,使第一轴构件232d插入到第二轴构件313内。当第一轴构件232d插入到第二轴构件313内时,装卸盖320和壳体100处于上述的分离状态。
374.如图24所示,在分离状态下,凸出筋323形成包围导轨112的形态。在分离状态下,第二凸起113插入于引导槽325。
375.然后,用户使装卸盖320沿第一旋转方向旋转。第一凸起324被引导至导轨112的外表面,并沿第一旋转方向旋转。第二凸起113将以旋转刷310的旋转轴为中心在引导槽325的内侧移动。
376.如图25所示,在装卸盖320沿第一旋转方向旋转的过程中,第三凸起326通过倾斜面326a使第一阻止部141c从旋转路径脱离,并且继续沿第一旋转方向旋转。
377.如图26所示,当第四凸起327被支撑壳体140阻挡时,装卸盖320的第一旋转方向旋转完毕。在此状态下,装卸盖320和壳体100将达到上述的结合状态。
378.在结合状态下,第三凸起326被第一阻止部141c阻挡,从而其第二旋转方向旋转被阻止。在结合状态下,第四凸起327的轴向移动被第二阻止部141d阻止。
379.在结合状态下,第一壁部112a阻止第一凸起324的轴向移动。并且,第二壁部112b阻挡第一凸起324的第一旋转方向旋转。
380.从壳体100分离刷子模块300的过程如下。
381.如图25所示,首先,用户按下按压按钮141。当用户按下按钮部141a时,第一阻止部141c从第三凸起326的旋转路径脱离。
382.此时,用户使装卸盖320沿第二旋转方向旋转。第三凸起326以固定轴a为中心沿第二旋转方向旋转而与第一阻止部141c隔开。
383.第二凸起113以旋转刷310的旋转轴为中心,在引导槽325的内侧移动。
384.如图24所示,第一凸起324被引导至导轨112的外表面,并沿第二旋转方向旋转。第一凸起324沿第二旋转方向旋转而从本体壳体110和第一壁部112a之间脱离。在此状态下,装卸盖320和壳体100达到上述的分离状态。
385.在现有文献1的真空吸尘器中,侧面盖和本体通过卡钩等卡合结构形成结合力。利用卡钩等卡合结构的结合结构是相对简单的结合结构。但是卡钩等卡合结构是在吸入管嘴的方向转换时难以稳定地支撑施加到旋转清扫部的轴向力的结构。
386.在本发明的真空吸尘器1中,如果按下按压按钮141并使装卸盖320沿第二旋转方向旋转,则壳体100和装卸盖320的结合结构将被解除。另外,在分离状态下,如果使装卸盖320沿第一旋转方向旋转,则壳体100和装卸盖320将形成结合力。
387.另外,在结合状态下,第一壁部112a阻止第一凸起324的轴向移动。第一壁部112a以固定轴a为中心沿圆周方向彼此隔开。
388.当吸入管嘴10的方向转换时,以固定轴a为中心沿圆周方向配置的第一壁部112a可以分散施加到旋转刷310的轴向力而进行支撑。
389.第四凸起327的轴向移动被第二阻止部141d阻止。另外,在结合状态下,第二壁部112b阻挡第一凸起324的第一旋转方向旋转。
390.第三凸起326被第一阻止部141c阻挡,从而其第二旋转方向旋转被阻止。第四凸起327被支撑壳体140阻挡,从而其第一旋转方向旋转被阻止。
391.即,除非按下按压按钮141,否则不能使装卸盖320在轴向上移动或以固定轴a为中心旋转。在本发明的真空吸尘器1中,如果不按下按压按钮141,则形成难以通过外力将壳体100和装卸盖320分离的牢固的结合结构。
392.图27是示出图19的吸入管嘴10的刷子模块300和驱动部200的立体图。图28是示出图27的驱动部200的侧视图。图29是示出图28的第一轴构件232d的立体图。
393.以下,为了本发明的理解上的便利,将旋转刷310移动以使第一轴构件232d插入到第二轴构件313内的轴向称为“第一轴向”。并且,将第一轴向的相反方向称为“第二轴向”。
394.第一轴构件232d是向第二轴构件313传递旋转运动的结构。第二轴构件313形成用于插入第一轴构件232d的空间。
395.如果旋转刷310沿第一轴向移动,则第一轴构件232d插入到第二轴构件313内。如果第一轴构件232d插入到第二轴构件313内,则第一轴构件232d和第二轴构件313彼此咬合并形成复数个接触面。
396.第一轴构件232d的旋转力通过接触面传递到第二轴构件313。在第一轴构件232d和第二轴构件313咬合的状态下,旋转刷310的旋转轴与第一轴构件232d的旋转轴将位于同一条线上。
397.在现有文献1的真空吸尘器中,驱动部在旋转清扫部的内部利用固定构件结合于旋转清扫部。因此,现有文献1的真空吸尘器存在驱动部和旋转清扫部的分解和组装困难的问题。
398.在本发明的真空吸尘器1中,如果按下按压按钮141并使装卸盖320旋转为分离状态,则第一轴构件232d和第二轴构件313咬合的状态将被解除。因此,在本发明的真空吸尘器1中,可以简单地分离旋转刷3101和驱动部200。
399.如图28和图29所示,第一轴构件232d包括轮毂232da和复数个第一传递部232db。
400.轮毂232da是结合从动滑轮232a的轴(以下,“滑轮轴pa”)的部分。第一轴构件232d以轮毂232da为中心旋转。
401.第一传递部232db以滑轮轴pa为中心形成轴对称(axial symmetry)。第一传递部232db的数量可以是多样的。作为一例,第一传递部232db的数量可以是四个。
402.一个第一传递部232db形成三个面。一个第一传递部232db形成第一面232d1、第三面232d2以及第五面232d3。
403.第一面232d1从轮毂232da的侧面大致沿滑轮轴pa的径向延伸。第一面232d1是向第二轴构件313传递第一轴构件232d的旋转力的面。第一面232d1与滑轮轴pa的径向形成相对较小的夹角。
404.第一面232d1以滑轮轴pa为中心形成螺旋形。沿第一轴向,第一面232d1逐渐位于第一轴构件232d的旋转方向。第一面232d1以轮毂232da为轴形成轴对称。
405.沿第二轴向,第一面232d1的面积逐渐减小。沿第二轴向,第一面232d1逐渐位于靠近旋转刷310的旋转轴的位置。
406.第三面232d2从轮毂232da的侧面大致沿滑轮轴pa的径向延伸。第三面232d2与滑轮轴pa的径向形成相对较小的夹角。
407.第三面232d2是接收旋转刷310的旋转惯性(rotational inertia)的面。旋转惯性是指旋转的物体欲要保持其旋转状态的能量的大小。
408.第二轴构件313是通过第一轴构件232d接收马达220的旋转力的结构。但是,如果第二轴构件313的旋转速度大于第一轴构件232d,则旋转刷310的旋转惯性可以被传递到第一轴构件232d。
409.即,在驱动部200停止运转之后旋转刷310的旋转惯性可以通过第二轴构件313传递到第一轴构件232d,直到旋转刷310停止。
410.或者,在调节旋转刷310的旋转速度的情况下,在马达220的旋转速度减速的过程中,旋转刷310的旋转惯性可以通过第二轴构件313传递到第一轴构件232d。
411.第三面232d2形成与旋转刷310的轴向平行的平面。第三面232d2以滑轮轴pa为中心形成轴对称。
412.沿第二轴向,第三面232d2的面积逐渐减小。沿第二轴向,第三面232d2逐渐位于靠近旋转刷310的旋转轴的位置。
413.当第一轴构件232d插入到第二轴构件313内时,一个第二传递部313b被插入到邻近的第一面232d1和第三面232d2之间。
414.第五面232d3是连接第一面232d1和第三面232d2的面。第五面232d3在滑轮轴pa的圆周方向上连接第一面232d1和第三面232d2。第五面232d3以滑轮轴pa为中心形成轴对称。
415.沿第二轴向,第五面232d3的面积逐渐减小。沿第二轴向,第五面232d3逐渐位于靠近旋转刷310的旋转轴的位置。
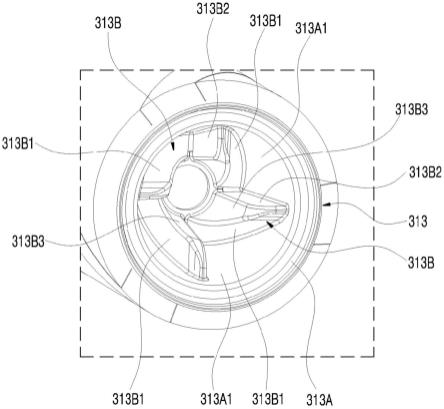
416.图30是示出图27的刷子模块300的侧视图。图31是示出图30的第二轴构件313的局部立体图。
417.如图30和图31所示,第二轴构件313包括轴体313a和复数个第二传递部313b。
418.轴体313a插入到主体311的一侧开口内。在轴体313a的外表面形成有插入槽313h。在主体311的内表面沿长度方向形成有凸出部311a。
419.当轴体313a插入到主体311的开口时,凸出部311a插入于插入槽3131h。凸出部311a阻止轴体313a的相对旋转。
420.第二传递部313b以滑轮轴pa为中心形成轴对称(axial symmetry)。当第一轴构件232d插入到第二轴构件313内时,第一轴构件232d和第二轴构件313彼此咬合并形成复数个接触面。因此,第二传递部313b的数量与第一传递部232db的数量相同。
421.一个第二传递部313b形成三个面。一个第二传递部313b形成第二面313b1、第四面313b2以及第七面313b3。轴体313a形成第六面313a1。
422.第二面313b1从轴体313a的内表面大致沿滑轮轴pa的径向延伸。第二面313b1与滑轮轴pa的径向形成相对较小的夹角。
423.第二面313b1以滑轮轴pa为中心形成螺旋形。沿第一轴向,第二面313b1逐渐位于第一轴构件232d的旋转方向。
424.第二面313b1以轴体313a为轴形成轴对称。沿第二轴向,第二面313b1逐渐位于靠近旋转刷310的旋转轴的位置。
425.图32是图19的吸入管嘴10的剖视图。图33是图32的b-b
′
剖视图。图34是图32的c-c
′
剖视图。图35是图32的d-d
′
剖视图。
426.第二面313b1是接收第一轴构件232d的旋转力的面。当第一轴构件232d插入到第二轴构件313内时,第二面313b1和第一面232d1将沿轴向形成螺旋形的第一接触面。第一轴构件232d的旋转力从螺旋形的第一接触面传递到第二轴构件313。
427.第一接触面以旋转刷310的旋转轴为中心彼此轴对称。沿第一轴向,第一接触面逐渐位于第一轴构件232d的旋转方向。
428.图36是表示作用于第一接触面c1的力的图。图37是表示传递到第二面313b1的力的图。
429.通过第一接触面c1作用于第二面313b1的第一轴构件232d的旋转力f可以分为与第一接触面c1平行的方向上的力f2(以下,“摩擦分力”)、和第一轴构件232d的法线方向上的力f1(以下,“作用力”)。
430.第一面232d1和第二面313b1形成光滑的面。即,第一接触面c1的摩擦系数(coefficient of friction)非常小。
431.因此,与作用力f1相比,可以假设为摩擦分力f2非常小。由此,第一面232d1和第二面313b1受第一轴构件232d的旋转力而在第一接触面c1上彼此滑动。
432.因此,主要由作用力f1通过第一接触面c1作用于第二面313b1。通过第一接触面c1传递到第二面313b1的作用力f1
′
可以分为轴向上的分力f1x
′
(以下,“移动分力”)和与第一轴构件232d的旋转力相同方向上的分力f1y
′
(以下,“旋转分力”)。
433.旋转刷310受旋转分力f1y
′
而进行旋转。并且,旋转刷310受移动分力f1x
′
而被推向第二轴向。移动分力f1x
′
和旋转分力f1y
′
的比例取决于第一接触面c1的导程(lead)。第一接触面c1的导程与第一面232d1和第二面313b1的导程相同。
434.现有文献1的真空吸尘器具有在使用时旋转清扫部受地面的反作用力和摩擦力而沿轴向游动的问题。旋转清扫部的轴向游动可能会在旋转清扫部和旋转支撑部以及第一侧面盖和第二侧面盖与腔室的接触面产生噪音。此外,旋转清扫部的轴向游动可能会损坏第一侧面盖和第二侧面盖与腔室的结合结构。
435.本发明的真空吸尘器1的优点在于,在使用时,旋转刷310在移动分力f1x
′
的作用下保持被推向第二轴向的状态,从而即使地面的反作用力和摩擦力在轴向上作用于旋转刷310,也防止旋转刷310的轴向游动。
436.沿第二轴向,第一面232d1的面积逐渐减小。因此,沿第二轴向,第一接触面的面积逐渐减小。
437.沿第二轴向,第一面232d1和第二面313b1逐渐位于靠近旋转刷310的旋转轴的位置。因此,沿第二轴向,第一接触面逐渐位于靠近旋转刷310的旋转轴的位置。
438.因此,随着旋转刷310被推向第二轴向的距离增加,通过第一接触面c1传递到第二面313b1的移动分力f1x
′
减小。因此,防止了旋转刷310受移动分力f1x
′
而被过度地推向第二轴向的现象。
439.第四面313b2从轴体313a的侧面大致沿滑轮轴pa的径向延伸。第四面313b2与滑轮轴pa的径向形成相对较小的夹角。
440.第四面313b2以滑轮轴pa为中心形成轴对称。沿第二轴向,第四面313b2逐渐位于靠近旋转刷310的旋转轴的位置。
441.第四面313b2形成与旋转刷310的轴向平行的平面。如果第一轴构件232d在螺旋形的第一接触面上将第二轴构件313推向第二轴向,则第一轴构件232d和第二轴构件313在保持第一接触面的状态下在轴向上隔开。
442.沿第一轴向,第一面232d1和第二面313b1逐渐位于第一轴构件232d的旋转方向。即,以一个第一传递部232db为基准,第一面232d1和第三面232d2将沿第二轴向逐渐靠近。
443.另外,以一个第二传递部313b为基准,第二面313b1和第四面313b2将沿第二轴向逐渐靠近。
444.因此,当第一轴构件232d通过第一接触面将第二轴构件313推向第二轴向时,第三面232d2和第四面313b2将被隔开。即,当第一轴构件232d通过第一接触面将第二轴构件313推向第二轴向时,第二接触面将被去除。
445.第四面313b2是将旋转刷310的旋转惯性(rotational inertia)传递到第一轴构件232d的面。当第一轴构件232da插入到第二轴构件313内时,第四面和第三面232d2可以形成与轴向平行的复数个第二接触面。第二接触面以旋转刷310的旋转轴为中心彼此轴对称。
446.图38是表示作用于第二接触面c2的力的图。
447.在驱动部200停止运转之后,旋转刷310的旋转惯性fi可以通过第二接触面c2传递到第一轴构件232d,直到旋转刷310停止。或者,在马达220的旋转速度减速的过程中,旋转刷310的旋转惯性可以通过第二接触面传递到第一轴构件232d。
448.旋转刷310的旋转惯性fi可以传递到第一轴构件232d,直到第二轴构件313以与第一轴构件232d相同的速度旋转或停止。通过第二接触面c2作用于第三面232d2的第二轴构件313的旋转力在法线方向上作用于第三面232d2。
449.因此,第一轴构件232d和第二轴构件313稳定地保持第二接触面,直到第二轴构件313以与第一轴构件232d相同的速度旋转或停止。
450.因此,在马达220的旋转速度减速的过程中,使由沿滑轮轴pa的径向传递的外力导致的第一轴构件232d和第二轴构件313的相对游动最小化。
451.当第一轴构件232d插入到第二轴构件313内时,第六面313a1可以与第五面232d3
形成接触面。第六面313a1和第五面232d3将用作抑制由沿滑轮轴pa的径向传递的外力导致的第一轴构件232d和第二轴构件313的相对游动的边界面。
452.第七面313b3是连接第二面313b1和第四面313b2的面。第七面313b3在滑轮轴pa的圆周方向上连接第二面313b1和第四面313b2。第七面313b3以滑轮轴pa为中心形成轴对称。
453.沿第二轴向,第七面313b3逐渐位于靠近旋转刷310的旋转轴的位置。当第一轴构件232d和第二轴构件313的接触面全部紧贴时,第一轴构件232d可以插入到第二轴构件313的内侧。在第一轴构件232d插入于第二轴构件313内的状态下,第七面313b3与轮毂232da隔开。
454.以上,对本发明的特定实施例进行了说明和图示,但是,本发明不限于所记载的实施例,对于本领域技术人员而言显而易见的是,在不脱离本发明的思想和范围内可以进行多样的修改和变形。因此,这些修改例或变形例不应独立于本发明的技术思想或观点而理解,并且变形的实施例应当落入本发明的权利要求范围内。
455.工业实用性
456.根据本发明的真空吸尘器,第一轴构件和第二轴构件形成复数个第一接触面,第一接触面以旋转刷的轴为中心形成螺旋形,由此,第一轴构件的旋转力不仅用于旋转旋转刷,而且还用于沿轴向推动旋转刷,从而即使作用有地面的反作用力和摩擦力,也能够使旋转刷的轴向游动最小化,由于在这一方面上超越了现有技术的局限,不仅有足够的应用装置的市售或营销的可能性,而不仅仅是相关技术的使用,并且达到了能够在现实中明确地实施的程度,因此是一项具有工业实用性的发明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。