齿轮
1.本技术要求于2019年9月27日提交的英国专利申请第gb1913978.1 号的优先权,该申请的全部内容通过引用并入本文。
技术领域
2.本发明大致涉及机械机器领域,更具体地,涉及允许二维啮合的特定齿轮(cogwheel)。
背景技术:
3.齿轮(cogwheel 或 gear)通常用于机械机器领域的各种用途。然而,从根本上说,齿轮用于在各种方向上传输扭矩。齿轮包括与另一带齿零件(例如另一齿轮或称为齿条的线性带齿零件)啮合的齿(也称为轮齿)。此类装置可用于改变电源的速度、扭矩和/或方向。当齿轮与齿条一起使用时,会产生平移而不是旋转。
4.特别有趣的情况是功率从第一轴平移至垂直于第一轴的第二轴。在不需要平移齿轮的静态状况下,通常使用蜗杆传动和斜动通过90度传递功率。然而,如果齿轮也需要在平移的同时保持与另一带齿零件的啮合,则此类装置无法运行。
5.如图1所示,解决此问题的一种方法是使用斜齿轮(helical cogwheels)。在图1中,第一斜齿轮11与第二斜齿轮12啮合。在这方面,当第二斜齿轮12被制动以防止其移动时,第一斜齿轮11能够旋转并利用旋转在特定方向上推进自身。以这种方式,包括第二斜齿轮12的相应轨道能够利于第一齿轮11的平移。在斜齿轮中,齿线是倾斜的,这使得它们比正齿轮更坚固,并且由于比正齿轮更高的啮合比而产生更小的噪音。斜齿轮通常用于功率传输。
6.然而,使用斜齿轮是不利的,因为第一斜齿轮11在第二斜齿轮12上旋转的实现会导致在第二斜齿轮12上产生轴向力。这种轴向力需要使用推力轴承,这增加了设计的复杂性。此外,轴向力意味着齿轮试图向上和在彼此上移动。一种方案是以顺时针方向旋转第一斜齿轮11,同时以逆时针方向旋转第二斜齿轮12,从而消除不想要的力。
7.然而,该方案需要使用特定齿型的齿条,以匹配齿轮的旋转方向,即顺时针或逆时针的齿条。这意味着力的平衡只可能在一个行进方向上。
8.如图2所示,包括数个斜齿轮的装置30被设置在齿条33上,并被配置为通过一个或多个斜齿轮的旋转在齿条33上平移。具体而言,装置30包括第一斜齿轮31和第二斜齿轮32。应注意,第一和第二斜齿轮31和32具有相反的旋转方向。但是,齿条33被设置为使得其允许任一轮在其齿面上的任何点旋转并实现平移。可以看出,该特征需要齿条被设置为带有用于顺时针和逆时针螺旋的切口,但额外的切口会减少齿轮31和齿条33之间的接触面积,从而减少力传递。具体而言,齿条33中的空隙突出了每个斜齿轮31和齿条33之间的低接触面积。
9.这限制了斜齿轮在装置30上的放置,以维持与齿条33的充分接触,从而导致此类装置30的设计中出现不需要的妥协。
10.因此,需要改善齿轮和齿条/其他齿轮之间的啮合机制。
技术实现要素:
11.鉴于已知的齿轮设计中的问题,本发明旨在提供一种改善的齿轮,其允许在垂直运行时增强齿轮的啮合。
12.一般而言,本发明引入了一种具有特定尺寸和齿廓的多齿轮设计,以允许齿轮的垂直啮合,同时允许此类齿轮的平移。
13.根据本发明提供了一种齿轮,包括第一齿轮零件和第二齿轮零件,第一齿轮零件包括数个齿,第二齿轮零件包括与第一齿轮零件相同数量的齿。第二齿轮零件被配置为与第一齿轮零件轴向间隔,第二齿轮零件具有与第一齿轮零件基本相同的齿距,第二齿轮零件的每个齿在旋转方向上相对于第一齿轮零件偏移一半齿距,第一齿轮零件的齿面宽基本为第一齿轮零件的齿距的一半,并且第二齿轮零件的齿面宽基本为第二齿轮零件的齿距的一半。
14.本发明进一步提供了一种与前述齿轮一起使用的齿条,齿条包括第一零件和第二零件,第一零件包括数个齿,第二零件包括与第一齿轮零件相同数量的齿。第二零件被配置为与第一零件横向间隔,第二零件的每个齿在纵向方向上相对于第一零件偏移基本一半节距,第一零件的齿面宽基本为第一零件的节距的一半,第二零件的齿面宽基本为第二零件的节距的一半。
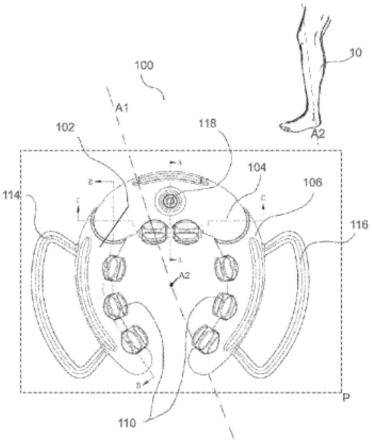
15.本发明进一步提供了一种运输装置,其被配置为与具有可重构物理拓扑的集群中的至少一个其他运输装置协作,该运输装置包括货品接收空间和重新定位单元,重新定位单元被配置为通过与至少一个其他运输装置的相互作用允许运输装置在集群内的重新定位。如前所述,重新定位单元为齿轮。
附图说明
16.仅参考附图以示例的方式描述本发明的具体实施方式,其中相同的附图标记表示相同或相应的部分,并且其中:图1为根据已知系统的两个斜齿轮垂直啮合的示意图;图2为示意图,示出了齿条上斜齿轮的使用以允许齿条上的装置的平移;图3为有助于理解齿轮形成原理的标准术语的示意图;图4为根据本发明第一具体实施方式的齿轮的示意图;图5为根据本发明第一具体实施方式的齿轮的轴向视图以及齿廓的详细图像;图6为根据本发明第一具体实施方式的齿轮的径向视图以及齿廓的详细图像;图7为根据本发明第一具体实施方式的改良齿轮的示意图;图8为根据本发明第一具体实施方式的两个齿轮的啮合示意图;图9为示意图,示出了第一齿轮与第二齿轮啮合的轴向视图,每个齿轮都根据本发明的第一具体实施方式;图10为示意图,示出了第一齿轮与第二齿轮啮合的径向视图,每个齿轮都根据本发明的第一具体实施方式;图11为示意图,示出了根据本发明第一具体实施方式的齿条;
由于用无理数计算齿距是不切实际的,所以机械工程师通常使用带正则值(a regular value)的比例因子代替。这被称为轮的模块或模量,并简单定义为:m = p/π。
31.模量也可以用齿轮的齿数量n和节径d(对应于节圆)来表示,具体而言:m = d / n。
32.压力角,θ齿彼此施加力的方向与接合两个齿轮中心的线之间的角的余角。对于渐开线齿轮,齿总是沿着作用线施加力,这对于渐开线齿轮来说是一条直线;并且因此,对于渐开线齿轮,压力角是恒定的。
33.齿根直径齿轮的直径,在齿的基底测量。
34.基圆(base circle)渐开线齿轮中,齿廓由基圆的渐开线生成。基圆的半径略小于节圆的半径。
35.圆弧齿厚特定基准圆上齿轮齿两侧之间的弧长。
36.齿面宽(face width)齿轮的齿面宽是轴向平面上齿的长度。对于人字齿( double helical),其不包括空隙。
37.节距(pitch)节距是一个齿上的点与相邻齿上的相应点之间的距离。其为在横向、法向或轴向方向上沿直线或曲线测量的尺寸。在没有限定的情况下单独使用节距可能是不明确的,因此最好使用特定的称号,例如端面齿距(transverse circular pitch)、法向基节、轴向节距。
38.齿槽底面(bottom land)齿槽底面是齿轮齿空间的底部与圆角邻接的表面。
39.齿顶(top land)齿顶是齿轮齿的顶部表面(有时为扁平的)。
40.间隙齿轮的齿根圆与其配对的齿顶圆之间的距离。
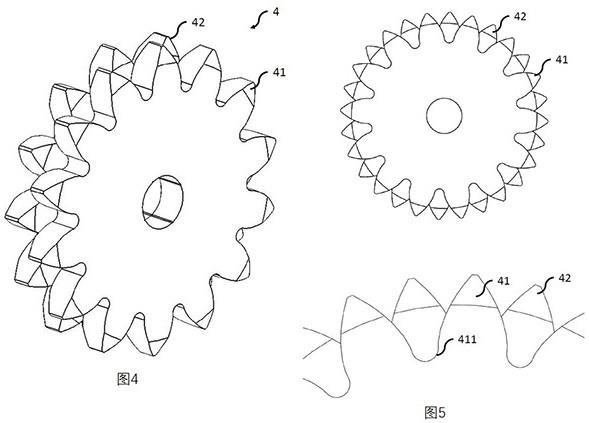
41.图4示出了根据本发明第一具体实施方式的齿轮4。齿轮4被设计为与其他相似设计的齿轮4一起使用,以便当齿轮的轴被配置为相互垂直时实现有效的啮合。以这种方式,使用其他齿轮的表面作为齿条以允许平移,齿轮能够在彼此上有效地平移。此外,齿轮4被设计与齿条一起使用,以允许齿轮沿纵向或横向方向(即彼此垂直的方向)在齿条的表面上平移。
42.为了实现这一点,齿轮4包括第一齿轮零件41和第二齿轮零件42。每个齿轮零件由齿轮上常见的特征形成,也就是具有一致齿廓的等距齿。在这方面,每个齿轮零件基本相同,但齿轮零件的定向相对于其他齿轮零件不同。
43.尽管图4示出了两个齿轮零件,但可以设想,在单个齿轮4中可以形成两个以上的齿轮零件。例如,如下文所述,五个齿轮零件可一起形成以提供特定优势。
44.更详细地说,第一齿轮零件41和第二齿轮零件42可以整体地形成。为了实现其功能,仔细选择第二齿轮零件42相对于第一齿轮零件41的配置。轴向安装第二齿轮零件42和第一齿轮零件41,以便它们在同一轴上旋转。此外,第二齿轮零件42与第一齿轮零件41呈轴向间隔配置。如图4所示,齿轮零件可被配置为在轴向方向上直接互相相邻。
45.具体而言,第二齿轮零件42位于与第一齿轮零件41轴向相邻的位置。此外,第二齿轮零件42进一步绕公共轴线旋转,使得当轴向观察时,第一齿轮零件41的齿顶高基本与第二齿轮零件42的齿根高对齐。如图4所示,第二齿轮零件42的每个齿相对于第一齿轮零件41旋转偏移一半齿,这允许第二齿轮(未显示)垂直于第一齿轮4的旋转方向平移。以这种方式,第一齿轮4可被设定为模拟用于第二齿轮(未示出)在其上垂直地移动的齿条(即,在第一齿轮4的轴向方向上)。
46.如图4所示,第一齿轮零件41和第二齿轮零件42在其各自的零件上具有相同数量的齿。此外,每个齿轮零件的直径基本相同。相应地,齿轮零件之间的齿距基本相同。
47.至于第二齿轮零件42相对于第一齿轮零件41的旋转偏移,该偏移被配置为使得第二齿轮零件42的齿与第一齿轮零件41的齿恰好不对齐。换句话说,第二齿轮零件42的齿被配置为相对于第一齿轮零件41以基本等于一半齿距的距离旋转偏移。以这种方式,第二齿轮零件42的每个齿的齿顶中部与第一齿轮零件41上的每个齿槽底面中部对齐。
48.此外,根据本发明第一具体实施方式,第一齿轮零件41和第二齿轮零件42的每个齿面宽被选择为基本相等,并且其距离允许两个齿轮4垂直啮合。为了实现这一点,每个齿轮零件的齿面宽被选择为等于一半齿距。如前所述,每个齿轮零件被选择为具有基本相同的齿距。以另一种方式表示,每个齿的齿面宽基本等于模量乘以pi的一半。
49.如之前定义所述,圆弧齿厚是齿的边缘之间的弧长。对于等距齿,圆弧齿厚等于一半齿距。因此,齿轮零件上每个齿的齿面宽预计基本等于圆弧齿厚,即每个齿的宽度与深度基本相同(当轴向观察时)。
50.图5示出了齿轮4在轴向方向上的视图。如图所示,第一齿轮零件41和第二齿轮零件42对齐,使得齿的顶部与齿槽底面的中部对齐,反之亦然。以这种方式,齿的侧部能够承受轴向负荷且不滑动,就像以90度啮合的两个正齿轮一样,并且相似地可用于齿条和齿轮系统。
51.图5还更详细地示出了从轴向方向上齿轮4的齿的齿廓。具体而言,可以发现渐开线齿廓对齿轮4的作用最为有益。以这种方式,齿轮4的行为高度模拟齿条和齿轮系统的行为。由图5看出,径向配置的齿每个都有渐开线齿轮轮廓。渐开线方程定义为:x = a(cos(t) t*sin(t))y = a(sin(t)-t*cos(t))当圆心(0,0)和半径为a时,曲线从(a,0)起始。
52.如图5所示,每个齿都有齿根间隙411,以增强在图5所示齿轮上运行时相应齿轮的平滑移动。
53.图6示出了齿轮4在径向方向上的视图,此外,还示出了齿廓的视图。可以看出,此视图中的齿廓与图5中所示齿廓不同。因此,齿轮4包括轴向和径向齿廓之间的不对称。具体而言,在轴向方向上选择的所选齿廓可允许在轴向垂直方向上有效的啮合。
54.更具体地,径向观察齿轮4时看到的所选齿廓与轴向观察齿轮时使用的渐开线轮
廓不同。图6所示的齿廓基本为矩形轮廓(不同于在轴向方向上观察齿轮4时看到的渐开线形状)。此外,齿根间隙未提供在图6的方向上。代替地,轴向观察齿轮4时所示的齿根高提供的齿根间隙充分允许齿轮4以90度啮合时的平滑运动,而无需形成附加的/更传统的齿根间隙。以这种方式,齿高度模拟传统齿条和齿轮系统的轮廓,使得在齿上移动的第二齿轮经历平滑运动。通过在轴向方向上不需要增进齿根间隙,齿间的接触面积被最大化。
55.可以进一步发现,当在径向方向上观察齿轮4时,通过向每个齿形的尖端提供间隙412(也称为缺口(relief)),可以实现性能的提高。具体而言,每个齿的锥形尖端可以缓解齿与齿轮以90度啮合的啮合。在这方面,当从轮廓上观察时,每个齿的齿顶高被形成类似于齿条,以便垂直于第一齿轮运行的第二齿轮4将平滑滚动。以这种方式,齿廓与渐开线齿条轮廓相似,无需提供通常的半圆齿根间隙(因为在垂直轴上已经提供了适当的齿根间隙)。
56.以这种方式,齿轮4在齿条上旋转时,以及第二齿轮4轴向垂直于第一齿轮4旋转时,成功地提供了连续接触和力传递。
57.与斜齿轮相比,第一具体实施方式的齿轮4可以提供极大改善的性能。具体而言,齿轮4不会受到来自除行进方向以外的其他方向上存在的不需要力的影响。此外,当与齿条一起使用时,所使用的齿条不会受到图2所示的大空隙的影响。
58.根据第一具体实施方式的齿轮4在被另一齿轮4在垂直方向上横穿时不会经历任何旋转力,即在与其圆周相切的方向上不经历任何力。这去除了对抗不必要力的任何复杂性。
59.可选地,在径向方向上观察齿轮时,每个齿的根部处的圆角大小可以增加。以这种方式,齿廓413的相对陡曲的下部可以在其根部平滑。这增加了接触面积,提供了改善的力传递。
60.图7示出了包括两个以上齿轮零件的齿轮4的实施例。具体而言,图7所示的齿轮4包括五个齿轮零件41~45,其在与齿条或等效齿轮4啮合时提供了改善的力传递。如前所述,每个齿轮零件41~45包括相同数量的齿,并且每个齿的直径基本相同,因此生成基本相似的齿距。与图4所示的齿轮4一样,每个齿轮零件在旋转轴上相对于之前的齿轮零件偏移——也是就,以一半齿距偏移。例如,与第一齿轮零件41相比,第二齿轮零件42被配置为在旋转方向上偏移一半齿距。类似地,与第二齿轮零件42相比,第三齿轮零件43被配置为在旋转方向上偏移一半齿距。因此,第三齿轮零件43和第一齿轮零件41在轴上旋转对齐。类似地,第四齿轮零件44和第二齿轮零件42也旋转对齐。类似地,第五齿轮零件45、第一齿轮零件41和第三齿轮零件43也旋转对齐。
61.此外,第一至第五齿轮零件41~45的齿面宽基本相同,从轴向方向观察时其为齿轮4的齿距的一半。以这种方式,齿轮4被配置为在轴向方向上提供等效齿条,以便通过垂直旋转的齿轮4进行高效的横穿。
62.图8~图10提供了根据本发明第一具体实施方式的两个齿轮4的设想啮合示意图。在此实施例中,可以解释为第一齿轮51在第二齿轮52上旋转,第二齿轮52会保持固定。以这种方式,第二齿轮52将提供第一齿轮51将在其上旋转的齿条。预计第一齿轮51的轴将由于其旋转而横向移动。另一方面,在该实施例中未设想第二齿轮52的旋转或平移。
63.更具体地,图8示出了第一齿轮51与第二齿轮52以90度啮合的情景。可以看出,轴向观察第一齿轮51时看到的齿廓与径向观察第二齿轮52时看到的齿廓啮合。因此,第二齿
轮52的齿廓被构造成最接近标准齿条的齿廓,用于第一齿轮51的平移。
64.图9示出了从与第一齿轮51的旋转轴成一直线的方向的啮合,该旋转轴垂直于第二齿轮52的旋转轴。在图9的示意图中,第一齿轮51可以相对于页面从左向右移动,同时第二齿轮52保持固定。可以看出,第一齿轮51的渐开线齿廓(从其轴向方向上看)与直齿(straighter)啮合,但第二齿轮52的齿廓(从其径向方向上看)具有锥形齿顶高。
65.图10示出了另一示意图,这次,第一齿轮51移入或移出页面,即朝向或远离观察者。在该视图中,第二齿轮52在轴向方向上示出,突出了其渐开线齿廓。尽管在此实施例中,第二齿轮52保持固定,但每个齿轮都可以有效地互换,即两者都具有前述的适当的轴向和径向齿廓,那么第一齿轮51可以保持固定,同时第二齿轮52被驱动以实现平移。根据第一具体实施方式的齿轮4的特定优点是,固定轮能够为其他齿轮4提供齿条,但也能够通电,并且从而在齿条和其他齿轮4上平移。
66.图11示出了被配置为与本发明第一具体实施方式的齿轮4一起使用的相应齿条6。在本实施例中,齿条被示出在运输装置的面板上,其使用将在后文描述。可以看出,齿条6具有与现有齿条不同的齿的特定配置。这是为了与齿轮4啮合而提供。
67.具体而言,齿条6由至少两个零件形成,每个零件包括数个齿。第一零件和第二零件被配置为彼此相邻。节距可以被测量为齿条6上一个齿的起始到下一个齿的起始之间的距离。因此,节距由齿形和槽组成。第二零件从第一零件纵向偏移一半节距。以这种方式,第二零件中的每个齿的中部与第一零件中的槽的中部基本对齐。
68.此外,第一零件与第二零件的齿面宽(即每个齿的厚度)基本相同。此外,第一零件与第二零件的齿面宽基本为一半节距。以这种方式,齿轮4可以纵向或横向地在齿条6上移动而不受阻碍。
69.可以设想,齿条6的齿廓可以被优化,以便与齿轮4一起运行。例如,从轴向方向观察,齿轮4中使用的相对直的齿廓可用于齿条6的纵轴和横轴。但是,也可以使用其他齿廓。例如,齿条6中使用的齿廓被设想为包括齿条上通常与具有渐开线齿廓的齿轮一起使用的齿廓。
70.可选地,在横向方向上,每个齿的根部处的圆角大小可以增加。以这种方式,齿廓的相对陡曲的下部可以在其根部在横向方向上平滑。这增加了接触面积,提供了改善的力传递。
71.图11所示的齿条被示为在每个齿条中有五个零件,即五排齿被横向配置在齿条上。以这种方式,图7所示的齿轮4可在齿条上使用。但是,可以使用任何数量的零件。多排齿的使用允许齿条上更宽的齿面宽,与少排齿相比,其允许更多的力传递,但总宽度相同。
72.图12~图14示出了运输装置7及其部件,其被配置为在其他运输装置7的集群中运行。于2017年10月4日提交的奥卡多创新有限公司(ocado innovation limited)英国专利申请第gb1716204.1号阐述了此类运输装置的概念,并于2018年10月3日重新提交为pct/ep2018/076928(公布为wo2019068775a1)(ocado innovation limited编号分别为000113gb和000113wo),这两份申请的内容在此通过引用并入全文。总之,这些应用公开了运输装置7的使用,运输装置7被配置为与具有可重构物理拓扑的集群中的至少一个其他运输装置协作。该运输装置包括货品接收空间和重新定位单元,重新定位单元被配置为通过与至少一个其他运输装置的相互作用允许运输装置在集群内的重新定位。
73.此类运输装置7面临的特定问题是需要围绕运输装置7的集群平移运输装置7。为了实现这一点,每个运输装置7包括四个活动齿面,其包括平移运输装置7的机构。以这种方式,每个齿面可使用与邻近运输装置7上的相应齿面的相互作用以允许三维移动。机构的先前实施例包括使用电磁体等移动集群中的运输装置7的磁性机构。但是,其可能很难控制,而且成本相对较高。
74.但是,通过将本发明第一具体实施方式的齿轮4与本发明第一具体实施方式的齿条一起使用,可以消除之前关于成本和控制的问题。
75.如图12所示,示出了运输装置7的第一齿面71和第二齿面72。第一齿面71包括被水平配置在该齿面上的两个齿条6,其中的空隙用于以垂直定向配置的齿轮4,即其旋转轴在该齿面上水平延伸。该齿面与位于集群中邻近的运输装置7上的相应第二齿面72相互作用。第二齿面72(其也被垂直安装于图12所示运输装置7的第一齿面71)包括被垂直配置在该齿面上的两个齿条6,以及被配置为使得其旋转轴垂直的齿轮4,因此轮通常水平放置。如前所述,第一齿面71和第二齿面72的相互作用将自然导致两个齿轮4以90度彼此啮合。但是,由于前述齿轮4的创新设计,所以通过保持一个齿轮4固定,啮合齿轮4可以在固定齿轮4上移动和平移,然后与齿轮4任一侧的齿条6啮合。以这种方式,就可以实现高效的二维平移。
76.通过考虑每个齿轮零件的直径、宽度、齿的数量等,可以为垂直移动的齿轮进行高效啮合。为了使齿轮4平滑地在另一齿轮4上移动,且不干扰任一侧的齿条,其移动的齿轮4必须足够宽,或者移动齿轮4必须足够快地弯曲(较小的半径),以确保移动齿轮4的齿不与齿条6接触。
77.图13示出了运输装置7的齿面上四个齿轮4的安装机构的实施例。在该实施例中,单个电机73可用于驱动齿轮4以及轴和传动系统,以将动力传递给每个齿轮4。弹簧部可包括在该结构中(通过柔性机构等),以通过使用弹簧张力来保持每个齿轮4与另一齿轮4或齿条6接触,从而确保齿轮4的正确啮合。
78.图14示出了运输装置7内部的剖视图,示出了在单个运输装置7中一个齿面如何与另一齿面完全嵌合。
79.至于集群内单个运输装置7的控制,齿面与运输装置7和/或运输装置7的堆垛相互作用。于2017年10月4日提交的ocado innovation limited英国专利申请第gb1716201.7号阐述了此类控制策略,并于2018年10月3日重新提交为pct/ep2018/076933(公布为wo2019068778a1)(ocado innovation limited编号分别为000164gb和000164wo),这些申请的内容在此通过引用并入全文。在本交叉引用文献中,运输装置7被称为运输容器,并且可以设想这些术语可以互换使用。
80.修改和变型在不脱离本发明的范围的情况下,可以对上述具体实施方式进行多种修改和变型。
81.齿轮4可以由任何适合抵抗变形的材料制成。例如,齿轮4和/或齿条6可根据特定应用由塑料、金属、木材或复合材料制成。在一个特定实施例中,齿轮4和/或齿条6可由金属制成,然后磁化。以这种方式,齿轮4和齿条6可以被制为互相吸引。以这种方式,当其应用于运输装置7时,运输装置7不会解体,并且提供良好的牵引力,不会滑移,也不会由于磁引力而产生更复杂的轮设计。
82.作为磁引力的替代方法,静电引力可以代替应用于齿轮4和/或齿条6。例如,该方法对由塑料形成的齿轮4和/或齿条6尤其有效。
83.在另一实施例中,齿轮4可被配置为设置有通信传递机构和/或电功率传递机构。以这种方式,齿轮4主体内设置的电子设备可通过电力和/或通信手段供电。例如,传感单元(例如,用倾斜传感器测量齿轮4的旋转)可设置在齿轮4内,并可提供动力,并因此通过通信传递机构和电功率传递机构传递信息。为了实现这一点,齿轮4可设置有滑环以与至少一个电刷接触,从而从旋转齿轮4传递功率/通信。
84.尽管图12描述了在运输装置7上实施的轮4和齿条6,但范围不限于仅为此类装置。具体而言,齿轮4可以附接到运输装置7的基底和安装在地板和/或下方运输装置7的上唇板/边缘上的齿条6。以这种方式,运输装置7可在x/y方向上移动,而不需要在同一z水平(垂直水平)上有任何其他运输装置7。
85.尽管图12示出了齿轮4和齿条6的一种可能配置,但也设想了其他配置。例如,更多的轮4和齿条6可以添加至每个运输装置7。这不仅允许垂直运动在与相邻运输装置7完全对齐的位置,而且允许垂直运动在一个运输装置7上进行一半,在另一运输装置上进行一半。以这种方式,不同尺寸的运输装置7可以互相相互作用。
86.本文所述的齿轮4可以形成具有相同齿轮廓的外露的带,并且能够与相邻的运输装置7相互作用。换句话说,可以形成齿轮4的履带。这将在运输装置7之间提供更大的接触,并且如果运输装置7被许多履带覆盖,这将允许运输装置7相对于其邻近装置移动更多的位置,而不仅仅是完全对齐的位置。
87.如前所述的齿轮4被示为在每个齿轮零件41和42上具有相同数量的齿,齿轮零件41和42与齿条6之间的齿的模块相同,齿轮零件41和42具有相同的半径,相邻齿轮零件41和42在旋转方向上偏移正好一半齿距,并且齿轮零件41和42具有相同的宽度。可以设想,例如通过改变齿的数量,这些参数中的每个都可被修改,并且仍然应用本文所公开的发明构思。
88.更具体地,每个齿轮零件41和42可具有不同数量的齿,每个齿轮零件41和42的齿以及齿条6的相应零件可以是不同的模块,齿轮零件41和42不需要具有相同的半径,相邻齿轮零件41和42可以在旋转方向上偏移大于或小于一半齿距的量,并且齿轮零件41和42不需要具有相同的宽度。齿轮零件41和42以及齿条6上的倒角和缺口可进行改造,以为齿轮4和齿条6提供适当的间隙,使其按预期运行,同时允许充分的力传递。可以设想,并非所有配置都有效,但出于材料优化的目的,或为了在一个系统中实现多个配置的优势,齿轮4和齿条6的此类修改可能会被证明是有用的,前提是相关应用能够达到充分的力传递。
89.此外,齿轮零件41和42不需要在轴向上完全相邻放置以便配对,并且只要对相应齿条6进行适当的修改,齿轮零件41和42在轴向方向上的其他间距是允许的。
90.出于说明和描述的目的已经呈现了本发明的具体实施方式的前述描述。并不旨在彻底地或限制本发明为所公开的精准形式。在不脱离本发明的精神和范围的情况下,可以进行修改和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。