技术特征:
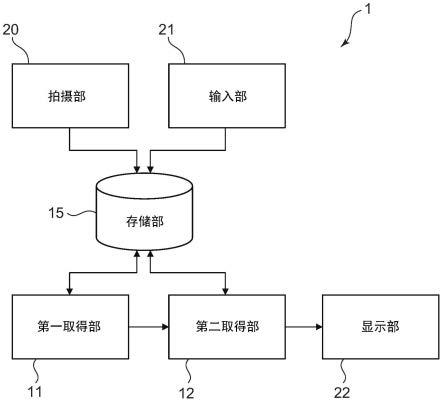
1.一种进展判定系统,具备:第一取得部,从拍摄有与作业有关的物品的图像中取得与多个颜色各自的面积值有关的面积数据;以及第二取得部,将所述面积数据输入至分类器,从所述分类器取得表示进度的分类结果。2.根据权利要求1所述的进展判定系统,其中,所述面积数据包含所述多个颜色各自的面积值、所述多个颜色各自的面积值的比率或所述多个颜色各自的面积值的分布。3.根据权利要求2所述的进展判定系统,其中,所述第一取得部基于与所述多个颜色分别对应的多个像素值的范围,判定所述图像中包含的各像素的颜色,将各个所述颜色的像素数作为所述面积值来计算。4.根据权利要求1或2所述的进展判定系统,其中,所述第一取得部从所述图像中进一步取得表示所述物品的边缘的边缘数据,所述第二取得部将所述面积数据及所述边缘数据输入至所述分类器,取得所述分类结果。5.根据权利要求1或2所述的进展判定系统,其中,还具备合并部,所述第一取得部从在相同的定时从相互不同的角度拍摄所述物品而得到的多个所述图像中,分别取得多个所述面积数据,所述合并部基于针对所述多个面积数据的各个准确度将所述多个面积数据合并为1个,所述第二取得部将合并后的所述面积数据输入至所述分类器,取得所述分类结果。6.根据权利要求5所述的进展判定系统,其中,针对所述多个面积数据的每一个面积数据的准确度基于从第一准确度、第二准确度、第三准确度及第四准确度中选择的1个以上,所述第一准确度与针对各个所述面积数据的可靠性对应而设定,所述第二准确度与各个所述图像中的所述物品的大小对应而设定,所述第三准确度与拍摄各个所述图像的拍摄部相对于所述物品的角度对应而设定,所述第四准确度与各个所述图像中的人的大小对应而设定。7.根据权利要求1或2所述的进展判定系统,其中,还具备拍摄所述物品的拍摄部,所述第一取得部从由所述拍摄部拍摄到的图像中切出拍摄有所述物品的区域,从所切出的所述图像中取得所述面积数据。8.根据权利要求1或2所述的进展判定系统,其中,所述第一取得部在从所述图像中去除拍摄有人的区域之后,取得所述面积数据。9.根据权利要求1或2所述的进展判定系统,其中,所述进展判定系统还具备显示部,所述显示部显示所述进度、基于所述图像被拍摄到的时刻而计算出的所述作业的实绩和预先设定的所述作业的计划。10.根据权利要求1或2所述的进展判定系统,其中,所述分类器将从拍摄有所述物品的学习图像中取得的面积数据作为输入数据,使用与
所述学习图像对应的进度作为标签来进行学习,对学习完毕的所述分类器输入从所述图像中取得的所述面积数据。11.一种进展判定方法,从拍摄有与作业有关的物品的图像中取得与多个颜色各自的面积值有关的面积数据;将所述面积数据输入至分类器,从所述分类器取得表示进度的分类结果。12.一种存储介质,存储有使计算机执行如下处理的程序:从拍摄有与作业有关的物品的图像中取得与多个颜色各自的面积值有关的面积数据;以及将所述面积数据输入至分类器,从所述分类器取得表示进度的分类结果。
技术总结
本发明提供能够提高进展的判定精度的进展判定系统、进展判定方法、程序及存储介质。实施方式的进展判定系统具备第一取得部及第二取得部。所述第一取得部从拍摄有与作业有关的物品的图像中取得与多个颜色各自的面积值有关的面积数据。所述第二取得部将所述面积数据输入至分类器,从所述分类器取得表示进度的分类结果。类结果。类结果。
技术研发人员:青木勇辅 樱井勇树 柴田智行
受保护的技术使用者:株式会社东芝
技术研发日:2021.09.06
技术公布日:2022/7/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。