1.本发明涉及消防灭火机器人技术领域,特别涉及一种仓储锂电池智能灭火机器人。
背景技术:
2.随着锂电池的快速发展应用,储能电站、锂电池工厂火灾事故时有发生,其主要原因是是锂电池使用过程中的热失控和热失控扩展。通过锂电池热失控预警系统可以及时发现锂电池热失控的发生,当系统产生热失控报警以后,需要及时对热失控导致的火苗进行灭火,防止火灾蔓延,造成更大的灾害。当产生热失控预警后,通过移动机器人及时准确运行到预警电池组位置并自动对现场情况作进一步的决策,自主执行灭火或者呼叫消防等动作,防止火灾蔓延,造成更大的灾害,这对仓储锂电池火灾灭火具有重要意义。
3.当前消防灭火机器人主要是针对火场灭火的大型机器人,具有体积大、智能化程度低、造价贵、使用成和维护成本昂贵等缺点,无法满足锂电池仓储场所灭火关键技术的使用需求。
技术实现要素:
4.为解决上述问题,本发明提供了一种仓储锂电池智能灭火机器人,具体是一种智能化、低成本、小巧灵活的移动机器人,来满足锂电池仓储场所灭火需求,机器人具有感知、定位、地图构建、路径规划以及自主决策等功能,并配有可控的降温、灭火系统,在第一时间控制火势,有效降低锂电池热失控导致的火灾。
5.本发明的上述目的是通过以下技术方案实现的,一种仓储锂电池智能灭火机器人,包括自下而上依次设置的下层移动底盘模块、中层控制系统模块以及上层灭火系统模块;所述下层移动底盘模块包括底盘框架,底盘框架下方设置有麦克纳姆轮、直流伺服驱动系统、底盘控制模块以及电源模块,底盘控制模块通过直流伺服驱动系统对麦克纳姆轮进行控制;所述上层灭火系统模块包括上层平台,上层平台上设有机械手、高压喷头、高压氮气瓶和水箱,高压氮气瓶通过电磁阀控制通断的气路管道连接至高压喷头,水箱通过高压水泵和水路管道连接至高压喷头;所述底盘框架与上层平台之间设有支撑上层平台的圆柱钢管;所述中层控制系统模块包括设置在底盘框架与上层平台之间的边缘计算模块、机械手臂控制柜以及环境感知与传感系统;所述机械手臂控制柜用于对机械手的动作进行控制,同时对电磁阀以及高压水泵进行控制,所述环境感知与传感系统用于感知机器人周围环境并将数据输出给边缘计算模块,机械手臂控制柜与边缘计算模块连接并受其控制;所述环境感知与传感系统包括rgbd相机、激光雷达、温湿度传感器、红外测温传感器以及红外避障传感器。
6.进一步方案,所述底盘框架下方设有四组麦克纳姆轮,所述直流伺服驱动系统包括直流电机驱动器、直流伺服电机,所述直流伺服电机设有四组并分别控制四组麦克纳姆轮。
7.进一步方案,所述直流伺服电机的输出通过减速箱和齿轮传动机构传递至麦克纳姆轮,所述减速箱为行星齿轮减速箱,所述齿轮传动机构为平行轴渐开线齿轮传动机构。
8.进一步方案,所述下层移动底盘模块还包括控制按钮,控制按钮设置在底盘框架顶部,控制按钮至少包括启动按钮、停止按钮以及急停按钮,控制按钮用于通过手动操作控制机器人的工作状态。
9.进一步方案,所述上层平台上还设有二自由度机械臂,所述二自由度机械臂具有绕竖直轴线转动和俯仰两个移动自由度并受控移动,二自由度机械臂的动作受机械手臂控制柜控制,所述高压喷头安装在二自由度机械臂上。
10.进一步方案,所述机械手上设有二指夹爪,用于夹取锂电池,上层平台上还设有一个nacl溶液池。
11.进一步方案,所述机械手上还设有热电偶。
12.进一步方案,所述高压氮气瓶设有两个,并卧倒安置在上层平台的两侧,气路管道上设有气压计。
13.进一步方案,所述中层控制系统模块还包括无线传输与报警模块,其与边缘计算模块连接,无线传输与报警模块包括用于与外界通信的无线通信模块和用于发出声光警报的报警模块。
14.综上所述,本发明的有益效果有:通过红外温度传感器检测目标点锂电池当前温度,同时通过rgbd相机采集的图像进行烟雾、火焰目标检测,判断现场是否有烟雾、火焰产生,实现火情的自主识别;若温度超过200摄氏度,同时检测到烟雾或者火焰,说明现场已经着火,需要喷射水雾进行灭火;若只检测到高温(超过200摄氏度),说明热失控处于初期,通过高压氮气喷射进行降温、隔离空气,防止着火,然后通过移动机器人上层的机械手将热失控电池取出放到nacl溶液中,使其快速放电。若温度未达到高温阈值,同时烟雾、火焰都未检测到,移动机器人通过机械臂上的热电偶作进一步检测,依然未检测到高温,说明锂电池未发生热失控,移动机器人通过无线传输模块与热失控预警系统进行通信,修正预警系统误报。本发明中的机器人,智能化、低成本、小巧灵活,满足锂电池仓储场所灭火需求,具有感知、定位、地图构建、路径规划以及自主决策等功能,并配有可控的降温、灭火系统,在第一时间控制火势,有效降低锂电池热失控导致的火灾。
附图说明
15.图1是本发明的模块化结构示意图;图2是本发明的整体结构示意图;图3是本发明的底部视角示意;图4是本发明中下层移动底盘模块的整体结构示意图;图5是本发明中中层控制系统模块的整体结构示意图;图6是本发明中上层灭火系统模块的整体结构示意图;图7是本发明中上层灭火系统模块的底部视角示意图;
图8是本发明中机器人的决策流程图。
具体实施方式
16.下面结合附图详细说明本发明的具体实施方式。
17.实施例:参考图1-7,一种仓储锂电池智能灭火机器人,采用模块化的设计方案,主体结构从下往上分别为下层移动底盘模块103、中层控制系统模块102以及上层灭火系统模块101。
18.下层移动底盘模块103包括底盘框架,底盘框架下方设置有麦克纳姆轮201-5、直流伺服驱动系统、底盘控制模块204以及电源模块202,底盘控制模块204通过直流伺服驱动系统对麦克纳姆轮201-5进行控制。底盘框架下方设有四组麦克纳姆轮201-5,所述直流伺服驱动系统包括直流电机驱动器205、直流伺服电机201-1,所述直流伺服电机201-1设有四组并分别控制四组麦克纳姆轮201-5。底盘控制模块204采用基于stm32f103芯片的单片机,单片机控制模块与直流电机驱动器205连接用于控制机器人的行走。所述直流伺服电机201-1的输出通过减速箱和齿轮传动机构传递至麦克纳姆轮,所述减速箱为行星齿轮减速箱201-2,所述齿轮传动机构为平行轴渐开线齿轮传动机构201-3。齿轮传动机构包括两个相互啮合的渐开线齿轮,以将直流伺服电机201-1的动力输出至麦克纳姆轮201-5的连接轴201-4。
19.电源模块202为商用48v锂电池组,为机器人供电。机器人采用四轮独立驱动模式。在直流伺服电机201-1上还连接有编码器201-0以对直流伺服电机201-1的转速进行检测和反馈。
20.所述下层移动底盘模块103还包括控制按钮,控制按钮设置在底盘框架顶部,控制按钮至少包括启动按钮203-2、停止按钮203-3以及急停按钮203-1,控制按钮用于通过手动操作控制机器人的工作状态。
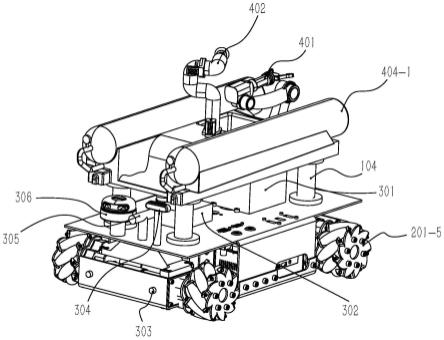
21.所述上层灭火系统模块101包括上层平台,上层平台上设有机械手401、高压喷头402、高压氮气瓶404-1和水箱403-1,高压氮气瓶404-1通过电磁阀控制通断的气路管道404-3连接至高压喷头402,水箱403-1通过高压水泵403-2和水路管道403-3连接至高压喷头402。所述上层平台上还设有二自由度机械臂,所述二自由度机械臂具有绕竖直轴线转动和俯仰两个移动自由度并受控移动,所述高压喷头402安装在二自由度机械臂上。
22.高压喷头402具有两个工作模式,即,高压氮气瓶404-1通过气路管道404-3和高压喷头402喷出高压氮气;或高压水泵403-2将水箱403-1内的水泵至高压喷头402喷出高压水雾。高压喷头402可选择具有两个独立喷孔的类型或只有一个喷孔的类型。
23.高压氮气瓶高压氮气瓶404-1设有两个,并卧倒安置在上层平台的两侧,气路管道404-3上设有气压计404-2。
24.机械手401的末端通过连接法兰连接有二指夹爪401-1和热电偶401-2,用于夹取锂电池,上层平台上还设有一个nacl溶液池405;热电偶401-2用于检测锂电池的温度。
25.底盘框架与上层平台之间设有支撑上层平台的圆柱钢管104,圆柱钢管104有四根,圆柱钢管104的两端设有法兰,通过螺栓分别与上层平台和底盘框架连接,底盘框架与上层平台用于连接圆柱钢管的位置设有螺纹孔103-1。
26.上层平台的底部整体作为水箱,可以尽量节省空间。
27.所述中层控制系统模块102包括设置在底盘框架与上层平台之间的边缘计算模块302、机械手臂控制柜301以及环境感知与传感系统;所述机械手臂控制柜301用于对机械手401的动作进行控制,同时对电磁阀以及高压水泵403-2进行控制,所述环境感知与传感系统用于感知机器人周围环境并将数据输出给边缘计算模块302,机械手臂控制柜301与边缘计算模块302连接并受其控制;二自由度机械臂的动作也受机械手臂控制柜301控制。
28.所述环境感知与传感系统包括rgbd相机304、激光雷达306、温湿度传感器、红外测温传感器305以及红外避障传感器303。在本实施例中,rgbd相机、激光雷达以及红外测温传感器设置在机器人的前侧,其中,rgbd相机为intel realsense d435 rgbd相机,激光雷达为思岚a2激光雷达。
29.所述中层控制系统模块102还包括无线传输与报警模块308,其与边缘计算模块302连接,无线传输与报警模块308包括用于与外界通信的无线通信模块和用于发出声光警报的报警模块。
30.边缘计算模块302选择英伟达jetson xavier nx人工智能设备,其中,jetson xavier nx作为主控制系统,装有ubuntu系统,ubuntu中安装ros系统,系统中包含即时定位与地图构建系统、目标识别、火情判断、自主决策等功能。
31.机器人的移动以及机械手、二自由度机械臂的上层控制采用ros系统进行运动控制,通过网络将运动指令传输到底盘控制模块和机械手臂控制柜。
32.采用视觉slam框架进行机器人定位与环境地图构建,其中slam框架采用orb-slam2进行及时定位与地图构建。
33.通过yolo v5目标识别网络进行迁移学习训练,通过训练好的网络来检测火焰、烟雾。
34.通过设计的决策算法实现机器人对热失控现场的自主决策与灭火动作执行。决策算法原理如下:智能灭火机器人自主决策流程包括如下几种情况,首先通过红外温度传感器检测目标点锂电池当前温度,同时通过摄像头采集的图像进行烟雾、火焰目标检测,判断现场是否有烟雾、火焰产生;若温度超过200摄氏度,同时检测到烟雾或者火焰,说明现场已经着火,需要喷射水雾进行灭火;若只检测到高温(超过200摄氏度),说明热失控处于初期,通过高压氮气喷射进行降温、隔离空气,防止着火,然后通过移动机器人上层的机械手将热失控电池取出放到nacl溶液中,使其快速放电。若温度未达到高温阈值,同时烟雾、火焰都未检测到,移动机器人通过机械臂上的热电偶作进一步检测,依然未检测到高温,说明锂电池未发生热失控,移动机器人通过无线传输模块与热失控预警系统进行通信,修正预警系统误报。移动机器人在往目标点行进的过程中需要不断检测自身周围的温度,若发现温度过高,需要进一步检测前方是否有火焰,并通过目标监测网络判断火势的大小,若检测到已发生大火,自身无法扑灭,则通过无线通信模块进行报警,呼叫消防救援,自身逃离火灾现场。
35.当仓储货架上的锂电池发生热失控,通过预警系统发射无线信号,中层控制系统模块102的无线传输与报警模块308接收并检测到热失控锂电池目标位置后,机器人启动,机器人按照图5的决策算法迅速移动到目标位置,到达目标位置后调整高压喷头方位角对准热失控锂电池,喷射氮气或水雾,阻碍燃烧或阻碍火势扩大。
36.以上所述的仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员
来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。