1.本发明涉及一种联合全站仪和激光跟踪仪的三维工程控制网构建方法,属于 测量工程技术领域。
背景技术:
2.三维工程控制网在精密工程和工业安装制造中有着广泛的应用。比如粒子加 速器等大科学装置,航天器、飞机、船舶、水轮发电机组等大型设备,都需要建 立三维控制网来提供高精度的坐标框架,以解决精密、复杂的元件按照设计位置 在大尺寸空间中精确定位问题。
3.全站仪和激光跟踪仪作为构建三维工程控制网的两种重要工具,建网方式常 以自由设站法为主。全站仪和激光跟踪仪在建立三维控制网时各有优势,全站仪 具有较高的测角精度,激光跟踪仪具有极高的测距精度。现有技术中,为了得到 更加精密的三维控制网,将这两种测量系统的优势相结合,即采用全站仪结合激 光跟踪仪一起建立三维控制网。例如,文献名为“激光跟踪仪结合全站仪的三维 控制网测量及其精度分析”中,采用激光跟踪仪和全站仪相结合的方式,施测了 总长285m的三维控制网利用sa软件解算的点位精度达0.03mm;文献名为“长 直轨道精密准直测量方案研究与应用”中,采用激光跟踪仪结合全站仪的方法进 行平面准直测量,110m的实验轨道平面直线准直精度优于0.2mm。通过联合全 站仪和激光跟踪仪进行三维控制网的构建,发挥出全站仪与激光跟踪仪各自的优 势,但是现有技术均是按照观测值先验精度确定全站仪和激光跟踪仪在建立三维 控制网时的权重,随着全站仪和激光跟踪仪的使用,其先验精度也会发生变化, 采用先验精度确定的权值并不一定反应全站仪和激光跟踪仪的真实精度,所确定 的权值无法代表实际器件的情况,进而影响控制网的精度。
技术实现要素:
4.本发明的目的是提供一种联合全站仪和激光跟踪仪的三维工程控制网构建 方法,以解决现有技术中根据先验精度定权时导致构建的控制网精度低的问题。
5.本发明提出一种联合全站仪和激光跟踪仪的三维工程控制网构建方法,该方 法包括以下步骤:
6.1)利用全站仪和激光跟踪仪获取目标区域内各个测站上所观测控制点的六 类观测值,根据获取的控制点观测值确定每一类观测值的初始方差,并设定初始 单位权中误差;根据初始单位权中误差和每一类观测值的方差确定六类观测值对 应的初始权矩阵和初始协方差矩阵;
7.2)根据得到的初始权矩阵和初始协方差矩阵对获取的控制点观测值进行平 差,得到每一类观测值的平差改正数,并根据所述平差改正数计算验后单位权中 误差与每一类观测值的验后方差估计值;
8.3)利用得到的每一类观测值的验后方差估计值对每一类观测值的初始方差 进行
更新,同时利用得到的验后单位权中误差对初始单位权中误差进行更新;根 据更新后的每一类观测值的验后方差估计值与验后单位权中误差,重新计算六类 观测值对应的权矩阵和协方差矩阵,利用重新计算后的权矩阵和协方差矩阵重新 对获取的控制点观测值进行平差,并重新计算的验后单位权中误差与每一类观测 值的验后方差估计值,直至与前一次的验后方差估计值的差值绝对值小于设定阈 值,将本次验后方差估计值对应的权矩阵作为最优权矩阵;
9.4)利用最优权矩阵实现三维工程控制网的构建。
10.本发明基于设定的初始单位权中误差与计算出的每一类观测值的初始方差, 确定出全站仪和激光跟踪仪各类观测值的验后方差估计值与单位权中误差,通过 不断对单位权中误差与各类观测值方差的更新迭代,确定与前一次验后方差估计 值的差值绝对值小于设定正数时的全站仪和激光跟踪仪各类观测值的权矩阵,将 此作为最优权矩阵,以实现高精度三维工程控制网的构建,相比于现有技术中基 于测量仪器的先验精度定权的方式,本发明根据控制点实际观测数据的平差结果 调整权值,更贴合仪器的实际使用情况,能够更好地发挥全站仪高精度角度观测 值和激光跟踪仪超高精度距离观测值的作用,进一步提高了三维工程控制网的精 度。
11.进一步地,所述六类观测值包括全站仪水平方向观测值、全站仪天顶距观测 值、全站仪斜距观测值、激光跟踪仪水平方向观测值、激光跟踪仪天顶距观测值、 激光跟踪仪斜距观测值。
12.进一步地,所述六类观测值的权矩阵为:
[0013][0014]iσk=bσ
lbt
[0015][0016][0017]
式中,σ0为单位权中误差,iσk为第i测站观测第k个控制点笛卡尔坐标下 (ixk,iyk,izk)的方差-协方差矩阵,分别代表水平方向观测值h、天顶 距观测值v和斜距观测值s对应的方差。
[0018]
进一步地,所述六类观测值的协方差矩阵为:
[0019]
[0020]
式中,分别为全站仪水平方向观测值、天顶距观测值和斜距 观测值的方差,q
11
、q
22
、q
33
分别为全站仪水平方向观测值、天顶距观测值和 斜距观测值的协因数阵;分别为激光跟踪仪水平方向观测值、天 顶距观测值和斜距观测值的方差,q
44
、q
55
、q
66
分别为激光跟踪仪水平方向观 测值、天顶距观测值和斜距观测值的协因数阵。
[0021]
通过上述公式确定每一类观测值的权矩阵,再基于每一类观测值的权矩阵确 定每一类观测值的协因数阵,并根据每一类观测值对应的方差,确定每一类观测 值的协方差矩阵,通过确定的每一类观测值的权矩阵和对应的协方差阵对获取的 观测值进行平差,以得到各类观测值的平差改正数,用于后续方差分量估计。
[0022]
进一步地,所述验后方差估计值为:
[0023][0024]
式中,vq为第q类观测值的平差改正数,pq为第q类观测值的权矩阵,mq为 第q类观测值的个数,q=1,2,
…
,6。
[0025]
根据上述公式确定每一类观测值的方差分量估值,不断迭代计算每一次更新 方差后的协方差矩阵和权矩阵,通过不断迭代计算确定最优方差分量估值,并以 此找到对应的最优权矩阵,用于三维工程控制网的构建,以提高三维工程控制网 的精度。
[0026]
进一步地,所述验后单位权中误差为:
[0027][0028]
为验后单位权中误差,n为总观测数,t为未知参数个数,v为观测值的 平差改正数矩阵,p为观测值的权矩阵。
[0029]
进一步地,所述设定正数为0.0001。
[0030]
在不断迭代计算过程中,当与上一次求得的方差分量估值小于0.0001时, 便认为此次结果已达到最优,此时对应的权矩阵即为最优权矩阵,以此确定出全 站仪和激光跟踪仪各类观测值的权重,建立更高精度的三维工程控制网。
附图说明
[0031]
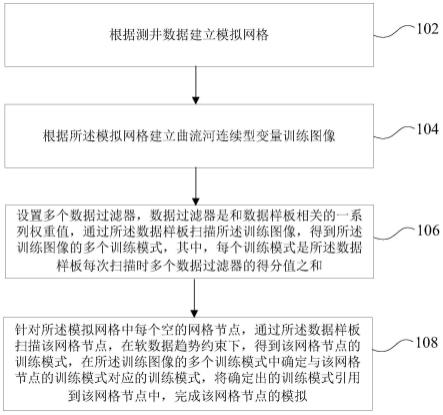
图1是本发明联合全站仪和激光跟踪仪的三维工程控制网构建的具体流程 图;
[0032]
图2是模拟实验中控制点空间分布图;
[0033]
图3(a)是模拟实验中采用方案一平差的点位误差椭球分布图;
[0034]
图3(b)是模拟实验中采用方案二平差的点位误差椭球分布图;
[0035]
图3(c)是模拟实验中采用方案三平差的点位误差椭球分布图;
[0036]
图3(d)是模拟实验中采用本发明方法平差的点位误差椭球分布图;
[0037]
图4(a)是实测实验中全站仪观测时控制点与测站的分布图;
[0038]
图4(b)是全站仪实测场景中控制点与测站的对应关系展示图;
[0039]
图5(a)是实测实验中激光跟踪仪观测时控制点与测站的分布图;
[0040]
图5(b)是激光跟踪仪实测场景中控制点与测站的对应关系展示图;
[0041]
图6(a)是实测实验中采用方案一平差的点位误差椭球分布图;
[0042]
图6(b)是实测实验中采用方案二平差的点位误差椭球分布图;
[0043]
图6(c)是实测实验中采用方案三平差的点位误差椭球分布图;
[0044]
图6(d)是实测实验中采用本发明方法平差的点位误差椭球分布图。
具体实施方式
[0045]
下面结合附图对本发明的具体实施方式作进一步地说明。
[0046]
本发明提出一种联合全站仪和激光跟踪仪的三维工程控制网构建方法,具体 流程如图1所示。本发明利用全站仪和激光跟踪仪获取目标区域内控制点的六类 观测值,再基于设定的初始单位权中误差与计算出的每一类观测值的初始方差, 确定出全站仪和激光跟踪仪各类观测值的验后方差估计值与验后单位权中误差, 然后通过不断对单位权中误差与各类观测值方差的更新迭代,重新计算每一次更 新后的验后方差估计值,直至与前一次验后方差估计值的差值绝对值小于设定正 数时,确定此次验后方差估计值对应的权矩阵为最优权矩阵,最后利用该最优矩 阵实现高精度三维工程控制网的构建。
[0047]
步骤1.获取数据
[0048]
在目标区域内自由设站,通过全站仪和激光跟踪仪对目标区域内的控制点进 行观测,得到控制点在这两种仪器下的水平方向观测值h、天顶距观测值v和 斜距观测值s,最终可以得到六类观测值,包括全站仪水平方向观测值、全站仪 天顶距观测值、全站仪斜距观测值、激光跟踪仪水平方向观测值、激光跟踪仪天 顶距观测值、激光跟踪仪斜距观测值。例如图4(a)和图4(b)所示,利用全 站仪在目标区域内自由设站,共架设三个测站,每个测站上观测所有控制点,得 到各个控制点的全站仪水平方向观测值、天顶距观测值和斜距观测值;如图5(a) 和图5(b)所示;利用激光跟踪仪在目标区域内自由设站,共架设6个测站, 每个测站上观测距测站100米内的所有控制点,得到控制点的激光跟踪仪水平方 向观测值天顶距观测值和斜距观测值。其中,每一测站观测控制点的个数可以根 据控制点距测站距离及观测仪器的实际测量精度进行确定;测站的个数也可以根 据目标区域的大小进行设置。
[0049]
步骤2.平差解算与权值的计算
[0050]
基于获取的数据进行平差解算,以构建准确的三维工程控制网满足实际工程 需要,本实施例中采用光束法平差模型进行平差解算。全站仪和激光跟踪仪都属 于空间球坐标测量系统,以激光跟踪仪为例,通过其水平度盘和垂直度盘可以获 得水平方向和天顶距读数,通过测距模块可以获取仪器中心到目标点的距离,从 而建立起以仪器中心为坐标原点的球坐标系。设激光跟踪仪观测某一目标点的水 平方向观测值为h,天顶距观测值为v,斜距观测值为s,则球坐标(h,v,s)变换 到笛卡尔直角坐标(x,y,z)的公式为:
[0051][0052]
取第1测站为基准测站和全局坐标系的原点,则第i测站的笛卡尔坐标系到 第1测站笛卡尔坐标系的坐标转换模型为:
[0053][0054]
式中,(1x,1y,1z)为第1测站笛卡尔坐标系中的坐标,(ix,iy,iz)为第i测站 笛卡尔坐标系中的坐标,(txi,tyi,tzi)为第i测站到第1测站的平移参数,α、β、 γ分别为第i测站坐标系向第1测站坐标系变换时绕x轴、y轴、z轴的旋转角。 由于球坐标测量系统具有较高的测距精度,各测站之间的尺度因子c可取为1。 假设仪器在观测前均已调平,则α和β的值应该很小,考虑到地球曲率的影响,
[0055][0056][0057]
式(3)和式(4)中,rg表示地球半径,可取rg=6371km。
[0058]
假设某次测量共布设了m个测站,对p个控制点进行了测量,则未知参数 个数为:
[0059]
t=6(m-1) 3p
ꢀꢀ
(5)
[0060]
设总观测数为n,则多余观测数:
[0061]
r=n-t
ꢀꢀ
(6)
[0062]
根据式(1),将第i测站观测第k个控制点的角度和距离观测值转换为笛卡尔 坐标(ixk,iyk,izk),以(ixk,iyk,izk)为观测值,以1xk、1yk、1zk(k=1,...,p)及αi、βi、 γi、txi、tyi、tzi(i=2,..,m)为未知参数,建立线性化后的误差方程
[0063]
v=aδx l
ꢀꢀ
(7)
[0064]
式中,x0=[1x
k0
,1y
k0
,1z
k0
,1α
i0
,1β
i0
,1γ
i0
,tx
i0
,ty
i0
,tz
i0
]
t
为未知参数的初值,δx=[d1xk,d1yk,d1zk,d1αi,d1βi,d1γi,d1txi,d1tyi,d1tzi]
t
,
[0065][0066]
其中,权比的确定对于平差结果的精度和可靠性有着直接影响,根据测量仪 器的先验精度来确定各类观测值的权比是一种常用的定权方式,但当采用两种不 同的球坐标测量系统进行观测时,就需要合理确定不同仪器、不同类型观测值的 权重。受到测量环境、仪器检校等因素的影响,观测值的先验精度并不一定能够 真实准确地反映出该类观测值的测量质量,本发明根据观测值的改正数向量来估 计各类观测值的方差和协方差来更加合理地确定各类观测值的权比。各类观测值 权值的计算过程如下:
[0067]
s1:确定初始权矩阵和初始协方差矩阵
[0068]
(1)确定初始方差和方差-协方差矩阵
[0069]
根据测量得到的控制点的六类观测值,计算控制点每一类观测值的初始方差, 可以得到全站仪水平方向观测值的初始方差全站仪天顶距观测值的初始方 差全站仪斜距观测值的初始方差激光跟踪仪水平方向观测值的初始方 差激光跟踪仪天顶距观测值的初始方差激光跟踪仪斜距观测值的初始 方差
[0070]
取第一测站为基准测站和全局坐标系的原点,将第i测站第k个控制点的角 度观测值(水平方向观测值)和距离观测值(天顶距观测值和斜距观测值)转换 为笛卡尔坐标系(ixk,iyk,izk),根据误差传播定律,可以得到控制点笛卡尔坐标 对应的方差-协方差矩阵iσk,计算公式如下:
[0071]iσk=bσ
lbt
ꢀꢀ
(8)
[0072][0073][0074]
(2)确定初始权矩阵
[0075]
根据上述方差-协方差矩阵iσk确定初始权矩阵,求计算公式如下:
[0076][0077]
式中,σ0为初始单位权中误差,可以根据测量仪器的先验精度自由设定的。
[0078]
因此可以得到这六类观测值的初始权矩阵,如下所示:
[0079][0080]
其中,全站仪水平方向观测值的权为p
h1
,天顶距观测值的权为p
v1
,斜距观 测值的权为p
s1
;激光跟踪仪水平方向观测值的权为p
h2
,天顶距观测值的权为p
v2
, 斜距观测值的权为p
s2
。
[0081]
(3)确定初始协方差矩阵
[0082]
根据步骤(1)计算出的各类观测值的初始方差与步骤(2)确定的初始权矩 阵,计算六类观测值的初始协方差矩阵,公式如下:
[0083]
[0084]
式中,分别为全站仪水平方向值、天顶距和斜距的方差,q
11
、 q
22
、q
33
分别为全站仪水平方向值、天顶距和斜距观测值的协因数阵;分别为全站仪水平方向值、天顶距和斜距观测值的协因数阵;分别为激光跟踪仪水平方向值、天顶距和斜距的方差,q
44
、q
55
、q
66
分别 为激光跟踪仪水平方向值、天顶距和斜距观测值的协因数阵。其中,每类观测值 的协因素阵为对应观测值权矩阵的逆矩阵。
[0085]
s2:计算验后方差和验后单位权中误差
[0086]
本发明采用helmert方差分量估计方法进行验后估计,分别采用本发明采用helmert方差分量估计方法进行验后估计,分别采用代表的验后方差估计值,对观测值 进行最小二乘平差,得到每一类的平差改正数vq,q=1,2,
…
,6,分别对应观测值 的6种类别;再根据计算得到的平差改正数vq及其二次型v
qt
p
qvq
计算每一类观 测值的验后方差估计值其计算公式如下:
[0087][0088]
式中,mq为第q类观测值的个数。
[0089]
同时可以计算出验后单位权中误差其计算公式为:
[0090][0091]
其中为验后单位权中误差,n为总观测数,t为未知参数个数,v为观测 值的平差改正数矩阵,p为观测值的权矩阵。
[0092]
步骤3.确定最优权矩阵,构建三维工程控制网
[0093]
根据步骤2得到的验后方差估计值对初始方差进行更新,同时根据得到的验 后单位权中误差对初始单位权中误差进行更新,利用更新后的方差和单位权中误 差按照步骤s1的过程再次得到每类观测值的协方差矩阵。即将得到的验后方差 估计值代入公式(8)-(9),重新计算控制点的方差-协方差矩阵,得到第一次 验后方差-协方差矩阵;再将验后单位权中误差和第一次验后方差-协方差矩阵代 入公式(11)和(12)中,得到第一次验后每类观测值的权矩阵,并对该权矩阵 求逆,得到第一次验后每类观测值的协因素阵;将验后方差和第一次验后协因素 阵代入公式(13)中计算,得到第一次验后每类观测值的协方差矩阵。
[0094]
根据第一次验后每类观测值的协方差矩阵再一次通过步骤s2对观测值进行 最小二乘平差,得到第一次验后每类观测值的改正数,重新计算每一类观测值的 验后方差估计值、验后单位权中误差,得到第二次每一类观测值的验后方差估计 值、验后单位权中误差。
[0095]
根据第二次每一类观测值的验后方差估计值、验后单位权中误差对方差、单 位权中误差再次更新,重复上述过程,直至最后计算得到的验后方差估计值与上 一次计算得到的验后方差估计值的差值小于设定阈值;此时,将这一次所对应的 权矩阵作为最优权矩阵,通过最优权矩阵构建更为精密的三维工程控制网。其中 设定阈值为一个较小的正数,本实施例中将其设置为0.0001。
[0096]
为了验证本发明方法构建三维控制网的可靠性及其精度,通过模拟实验和实 测实验进行验证。这两个实验均是通过四种方案对控制网进行平差解算,通过对 比不同方案
精度来验证本发明方法构建的三维控制网的精度。四种方案具体如下:
[0097]
方案一:全站仪控制网按光束法平差模型解算,根据观测值先验精度定权。
[0098]
方案二:激光跟踪仪控制网按光束法平差模型解算,根据观测值先验精度定 权。
[0099]
方案三:联合全站仪和激光跟踪仪的观测值按光束法平差模型解算,根据观 测值先验精度定权。
[0100]
方案四(本发明方法):联合全站仪和激光跟踪仪的观测值按光束法平差模 型解算,根据本发明方法验后定权。
[0101]
1.模拟实验
[0102]
该实验模拟了呈长方体状分布的16个控制点cp1~cp
12
,其坐标见表1,空 间分布如图2所示。实验设计了3个测站位置,三维坐标分别为(10m,5m,1.5 m)、(30m,5m,1.5m)、(50m,5m,1.5m)。选用型号为leica ms60的全站仪, 其标称的测角精度为
±
0.5
″
,
[0103]
测距精度为
±
(1mm 1.5mm/km
×
d)。选用型号为leica at402的激光跟踪仪, 其标称的测距精度为
±
(15mm 6mm/m
×
d),当d=20m时,测角精度约为
±
1.4
″
;测 距精度全量程优于
±
10μm。在3个测站上依次架设全站仪和激光跟踪仪,按照 标称精度生成模拟观测值,并按照上述四种方案平差解算。
[0104]
表1:
[0105][0106]
四种方案平差结果的精度对比结果如表2所示,方案四中验后方差估计前后 各类观测值的中误差以及权重如表3所示,四种方案平差后的点位坐标与设计坐 标的三维坐标偏差如表4所示,各个控制点的误差椭球分布如图3(a)-3(d) 所示。
[0107]
表2:
[0108][0109]
表3:
[0110][0111]
表4:
[0112][0113]
由表2可以看出,方案三的点位误差均方根和最大点位中误差小于方案一与 方案二,表明联合联合两种仪器构建的三维控制网的点位精度优于单种测量系统 构建的三维控制网的点位精度。方案四(即本发明)的点位误差均方根和最大点 位中误差小于方案三,结合表3中基于本发明方法定权前后(验前和验后),各 类观测值权重的变化可以看出,采用本发明方法定权能够使全站仪与激光跟踪仪 观测值的权重更加合理,从而提高平差结果的精度。表4中,方案三的三维坐标 偏差均方根小于方案一和方案二,方案四的三维坐标偏差均方根小于方案三,与 表2反映出的规律一致。
[0114]
观察图3(a)-3(d)中点位误差椭球的分布,图3(a)中全站仪控制网的误 差椭球的第一主轴近似分布在x轴方向,也即沿着距离观测值的方向,这与全 站仪的距离观测值精度较低、角度观测值精度较高的客观实际相符;图3(b)中激 光跟踪仪控制网的误差椭球第
一主轴方向近似分布在y轴方向,也即垂直于距离 观测值的方向,这与激光跟踪仪距离观测值精度很高、角度观测值精度较低的客 观实际相符。对比图3(c)与图3(a)可以看出,联合平差的点位误差椭球体 积小于全站仪控制网平差的点位误差椭球体积,且控制点在x轴方向上的精度 有明显提高;对比图3(c)与图3(b)可以看出,联合平差的点位误差椭球体 积小于激光跟踪仪控制网平差的点位误差椭球体积,且控制点在y轴方向上的精 度有明显提高,表明联合平差有效发挥了全站仪高精度角度观测值和激光跟踪仪 高精度距离观测值的作用,使得联合平差的精度优于单系统观测值平差的精度。 对比图3(d)与图3(c)可以看出,经本发明方法定权后,点位误差椭球的第一主轴 长度变短,椭球体积变小,表明点位精度得到了进一步提高。
[0115]
2.实测实验
[0116]
在某廊道内建立长约200m的室内直伸型三维控制网,利用1台leica ms60 全站仪在廊道内自由设站,共架设3个测站,每个测站上双面2测回观测所有控 制点,测量场景如图4(a)和图4(b)所示。利用1台leica at402激光跟踪仪 在廊道内自由设站,共架设6个测站,每个测站上观测100m内的所有控制点, 测量场景如图5(a)和图5(b)所示。按照上述四种方案进行平差解算。
[0117]
四种方案平差结果的精度对比如表5所示,本发明方法方差估计前后各类观 测值的中误差以及权重如表6所示,四种方案点位误差椭球的分布如图6(a)-6 (d)所示。
[0118]
表5
[0119][0120]
表6
[0121][0122]
由表5可以看出,方案三的点位误差均方根和最大点位中误差小于方案一和 方案二的结果,与表2中模拟观测数据反映的规律一致,说明联合平差的点位精 度高于单系统平差结果的点位精度。方案四的点位误差均方根和最大点位中误差 进一步减小,结合表6可以看出,采用本发明方法定权与按先验精度定权相比, 能够根据验后信息更加合理地确定全站仪和激光跟踪仪测角、测距观测值的权重, 进一步提高平差结果的精度。
[0123]
此试验中的廊道控制网为狭长型的空间结构,测站与控制点的连线与廊道纵 向近似平行。图6(a)中,全站仪控制网的误差椭球第一主轴方向与廊道纵向 近似平行,表明测站与控制点连线方向上的精度较低,反映出全站仪的距离观测 值精度较低,与图3(a)中的规律一致。图6(b)中,激光跟踪仪控制网的误 差椭球第一主轴方向与廊道横向近似平
行,表明垂直于测站与控制点连线方向上 的精度较低,反映出激光跟踪仪的角度观测值精度较低,与图3(b)中的规律 一致。对比图6(c)与图6(a)、图6(b)可以看出,联合平差的点位误差椭 球小于单测量系统平差的点位误差椭球,表明联合平差比单系统控制网平差的点 位精度更高。图6(d)中的点位误差椭球与图6(c)中的点位误差椭球相比, 体积有所减小,表明采用本发明方法定权的联合平差点位精度优于按先验精度定 权的联合平差结果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。