1.本发明涉及车辆技术领域,特别涉及一种汽车星空顶棚图像的处理方法、装置及车辆。
背景技术:
2.随着车辆技术的飞速发展,使得车辆的配置越来越高,现有的部分车型在出厂已经配备星空顶棚,由于星空顶棚能够实现一些流星效果和星座效果,使得用户的体验更好。
3.现有技术中,由于星空顶棚只能按照汽车厂商预先设定的程式或者效果进行点亮,而在应用过程中用户想要自行设定点亮方式,从而亟需一种能够满足用于个性化的星空顶棚。
技术实现要素:
4.本发明实施例提供一种汽车星空顶棚图像的处理方法、装置及车辆,能够根据自行设定的星空图片点亮星空顶棚,满足用户个性化需求。
5.本发明实施例第一方面提供一种汽车星空顶棚图像的处理方法,所述方法包括:
6.根据获取的星空播放数据中的像素数据,建立二维数组,并在所述二维数组中每个像素数组的存储地址中存储该像素对应的颜色值;
7.根据所述二维数组的存储地址存储的颜色值,从所述二维数组中确定用于进行星空投影的n个二维数据,其中,n为大于1的整数;
8.根据所述n个二维数据,从所述星空顶棚中的星空灯阵列中获取与所述n个二维数据对应的n个星空灯;
9.将所述星空灯阵列中的所述n个星空灯点亮,以及控制剩余星空灯处于熄灭状态,其中,所述剩余星空灯为所述星空灯阵列中除所述n个星空灯之外的星空灯。
10.可选的,所述根据获取的星空播放数据中的像素数据,建立二维数组,包括:
11.若所述星空播放数据为视频数据,则将所述星空播放数据按设定时长进行数据提取,获取数据帧图片集;针对所述数据帧图片集中每个数据帧图片中的像素数据,建立所述二维数组。
12.可选的,所述针对所述数据帧图片集中每个数据帧图片中的像素数据,建立所述二维数组,包括:
13.针对所述数据帧图片集中每个数据帧图片,根据数据帧图片的分辨率,建立一个与数据帧图片的分辨率匹配的二维坐标;根据数据帧图片中的每个像素的所在位置,获取每个像素在建立的所述二维坐标的二维数据;根据每个像素的二维数据,建立所述二维数组。
14.可选的,所述根据所述二维数组的存储地址存储的颜色值,从所述二维数组中确定用于进行星空投影的n个二维数据,包括:
15.根据所述二维数组的存储地址存储的颜色值,将所述二维数组中每相邻两个像素
的颜色值进行比对,获取颜色变化值大于设定值的n个像素;
16.从所述二维数组中获取所述n个像素对应的二维数据作为所述n个二维数据。
17.可选的,在从所述二维数组中确定用于进行星空投影的n个二维数据之后,所述方法还包括:
18.根据所述n个二维数据,确定投影素描边界。
19.可选的,所述根据所述n个二维数据,从所述星空顶棚中的星空灯阵列中获取与所述n个二维数据对应的n个星空灯,包括:
20.建立所述星空灯阵列的星空坐标系;
21.将所述投影素描边界按比例映射到所述星空坐标系中,获取所述n个二维数据映射的n个星空灯坐标;
22.获取所述n个星空灯坐标对应的所述n个星空灯。
23.可选的,所述将所述星空灯阵列中的所述n个星空灯点亮,以及控制剩余星空灯处于熄灭状态,包括:
24.根据所述n个星空灯的地址,将所述n个星空灯点亮;
25.根据所述剩余星空灯中的每个星空灯的地址,控制所述剩余星空灯处于所述熄灭状态。
26.本发明实施例第二方面还提供一种汽车星空顶棚图像的处理装置,所述装置包括:
27.数组创建单元,用于根据获取的星空播放数据中的像素数据,建立二维数组,并在所述二维数组中每个像素数组的存储地址中存储该像素对应的颜色值;
28.二维数据获取单元,用于根据所述二维数组的存储地址存储的颜色值,从所述二维数组中确定用于进行星空投影的n个二维数据,其中,n为大于1的整数;
29.星空灯确定单元,用于根据所述n个二维数据,从所述星空顶棚中的星空灯阵列中获取与所述n个二维数据对应的n个星空灯;
30.星空灯控制单元,用于将所述星空灯阵列中的所述n个星空灯点亮,以及控制剩余星空灯处于熄灭状态,其中,所述剩余星空灯为所述星空灯阵列中除所述n个星空灯之外的星空灯。
31.可选的,所述数组创建单元,用于若所述星空播放数据为视频数据,则将所述星空播放数据按设定时长进行数据提取,获取数据帧图片集;针对所述数据帧图片集中每个数据帧图片中的像素数据,建立所述二维数组。
32.本发明实施例第三方面还提供一种车辆,包括车辆本体、星空顶棚和设置在所述车辆本体中的如第二方面提供的汽车星空顶棚图像的处理装置。
33.本技术实施例中的上述一个或至少一个技术方案,至少具有如下技术效果:
34.基于上述技术方案,根据获取的星空播放数据中的像素数据,建立二维数组,并在所述二维数组中每个像素数组的存储地址中存储该像素对应的颜色值;根据所述二维数组的存储地址存储的颜色值,从所述二维数组中确定用于进行星空投影的n个二维数据;根据所述n个二维数据,从所述星空顶棚中的星空灯阵列中获取与所述n个二维数据对应的n个星空灯;将所述星空灯阵列中的所述n个星空灯点亮,以及控制剩余星空灯处于熄灭状态;如此,可以将获取的星空播放数据,将星空顶棚中的星空灯阵列中的n个星空灯点亮,以及
控制剩余星空灯处于熄灭状态,从而实现了根据自行设定的星空图片点亮星空顶棚,满足了用户的个性化需求,使得用户的体验更好。
附图说明
35.图1为本技术实施例提供的汽车星空顶棚图像的处理方法的流程示意图;
36.图2为本技术实施例提供的汽车星空顶棚图像投影系统的系统框架图;
37.图3为本说明书提供的汽车星空顶棚图像投影系统的点亮逻辑的流程示意图;
38.图4为本技术实施例提供的汽车星空顶棚图像的处理装置的结构示意图。
具体实施方式
39.下面结合附图对本技术实施例技术方案的主要实现原理、具体实施方式及其对应能够达到的有益效果进行详细的阐述。
40.实施例
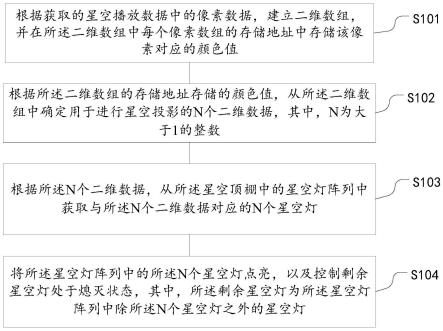
41.请参考图1,本技术实施例提供一种汽车星空顶棚图像的处理方法,所述方法包括:
42.s101、根据获取的星空播放数据中的像素数据,建立二维数组,并在所述二维数组中每个像素数组的存储地址中存储该像素对应的颜色值;
43.s102、根据所述二维数组的存储地址存储的颜色值,从所述二维数组中确定用于进行星空投影的n个二维数据,其中,n为大于1的整数;
44.s103、根据所述n个二维数据,从所述星空顶棚中的星空灯阵列中获取与所述n个二维数据对应的n个星空灯;
45.s104、将所述星空灯阵列中的所述n个星空灯点亮,以及控制剩余星空灯处于熄灭状态,其中,所述剩余星空灯为所述星空灯阵列中除所述n个星空灯之外的星空灯。
46.本说明书实施例中,车辆可以是包括燃油车和电动车,电动车例如可以是纯电动汽车、增程式电动汽车、混合动力汽车、燃料电池电动汽车和氢发动机汽车等。
47.其中,在步骤s101中,首先获取星空播放数据,星空播放数据可以是包含了星空图像的视频数据或者图片数据,以及在获取星空播放数据之后,获取星空播放数据中的像素数据,再根据星空播放数据中的像素数据,建立二维数组。
48.具体来讲,在根据星空播放数据中的像素数据,建立二维数组时,可以根据像素数据中每个像素的坐标,建立一个二维数组来定义每个像素的坐标,根据建立的每个像素的坐标,从而得到二维数组;也可以根据像素数据对应的分辨率,建立一个与数据帧图片的分辨率匹配的二维坐标,然后将二维坐标中的坐标与像素数据中每个像素的坐标进行对应,从而建立了二维数组。
49.具体地,若星空播放数据为视频数据,则将星空播放数据按设定时长进行数据提取,获取数据帧图片集;针对数据帧图片集中每个数据帧图片中的像素数据,建立二维数组,并针对每个数据帧图片,执行步骤s101-s104。其中,在针对数据帧图片集中每个数据帧图片中的像素数据,建立二维数组时,可以针对数据帧图片集中每个数据帧图片,根据数据帧图片的分辨率,建立一个与数据帧图片的分辨率匹配的二维坐标;再根据数据帧图片中的每个像素的所在位置,获取每个像素在建立的二维坐标的二维数据;根据每个像素的二
维数据,建立二维数据。
50.以及,在针对数据帧图片集中每个数据帧图片,根据数据帧图片的分辨率,建立一个与数据帧图片的分辨率匹配的二维坐标时,可以以数据帧图片中的任意一个像素作为原点,基于原点来建立一个与数据帧图片的分辨率匹配的二维坐标;也可以在数据帧图片之外预设一个原点,再基于原点来建立一个与数据帧图片的分辨率匹配的二维坐标。较佳的,可以以数据帧图片中的第一个像素作为原点,基于原点来建立一个与数据帧图片的分辨率匹配的二维坐标。
51.本说明书实施例中,设定时长可以根据实际需求进行设定,也可以由人工或设备自行设定,设定时长例如可以是100毫秒(ms)、200ms、500ms和800ms等。
52.具体地,若星空播放数据为星空图像,则直接根据星空播放数据中的像素数据,建立二维数组,其建立方式具体参考星空播放数据为视频数据的建立方式,为了说明书的简洁,在此就不在赘述了。
53.以及,在建立二维数组之后,获取播放数据中的每个像素的颜色值例如可以是rgb值或灰度值,针对每个像素,用二维数组中像素的存储地址来存储像素的颜色值。例如,以像素a为例,确定二维数组中a的存储地址为a1,并在a1中存储a的颜色值。
54.在实际应用过程中,星空播放数据通常存储在车辆的多媒体系统中,在获取星空播放数据时,需要从多媒体系统中选取,在选取星空播放数据之后,多媒体系统会执行步骤s101-s103,然后将n个星空灯发送给车身控制器;在执行步骤s104时,此时,车身控制器会根据接收到的n个星空灯,生成控制命令,车身控制器并将控制命令传输至星空顶棚电控单元(electronic control unit,简称ecu),再由星空顶棚ecu执行步骤s104。
55.在建立二维数组之后,执行步骤s102。
56.在步骤s102中,可以根据二维数组的存储地址存储的颜色值,将二维数组中每相邻两个像素的颜色值进行比对,获取颜色变化值大于设定值的n个像素;从二维数组中获取n个像素对应的二维数据作为n个二维数据。当然,也可以将每个相邻的3个或3个以上的像素的颜色值进行比对,获取颜色变化值大于设定值的n个像素;从二维数组中获取n个像素对应的二维数据作为n个二维数据。
57.在另一实施例中,还可以根据二维数组的存储地址存储的颜色值,将二维数组划分成多个小区域,针对多个小区域中的每个小区域,获取小区域内颜色值差异值大于设定值的像素,将获取的每个小区域内颜色变化值大于设定值的所有像素对应的二维数据作为n个二维数据。其中,设定值可以根据实际需求进行设定,也可以由人工或设备自行设定,本说明书不作具体限制。
58.由于获取的n个二维数据中每个二维数据对应的像素点与其相邻的像素点的颜色差异值均大于设定值,使得n个二维数据能够很好体现出星空播放数据中的星空轮廓。
59.本说明书另一实施例中,在从二维数组中确定用于进行星空投影的n个二维数据之后,还可以根据n个二维数据,确定投影素描边界,其中,投影素描边界是由n个二维数据组成的图像。
60.在确定n个二维数据之后,执行步骤s103。
61.在步骤s103中,首先获取星空顶棚中的星空灯阵列,再建立星空灯阵列的星空坐标系;在建立星空坐标系之后,若未获取投影素描边界,则直接将n个二维数据投影到星空
坐标系中,获取n个二维数据映射的n个星空灯坐标;获取n个星空灯坐标对应的n个星空灯;若已获取了投影素描边界,则将投影素描边界按比例映射到星空坐标系中,获取n个二维数据映射的n个星空灯坐标;获取n个星空灯坐标对应的n个星空灯,n个星空灯可以是n个星空灯的地址,在每个星空灯具有标识时,n个星空灯也可以是n个星空灯的地址,本说明书不作具体限制。
62.由于n个二维数据能够很好体现出星空播放数据中的星空轮廓,如此,在将n个二维数据映射到的n个星空灯进行电流,将剩余星空灯进行熄灭,使得星空灯阵列也能够较好的体现出星空播放数据中的星空轮廓。
63.在获取到n个星空灯之后,执行步骤s104。
64.在步骤s104中,在确定n个星空灯之后,从星空灯阵列中获取除n个星空灯之外的剩余星空灯,然后生成将n个星空灯进行点亮及剩余星空灯熄灭的控制命令,将控制命令发送给星空灯阵列,然后将星空灯阵列中的n个星空灯点亮,以及将剩余星空灯中的每个星空灯熄灭,从而实现了将n个星空灯点亮,以及控制剩余星空灯处于熄灭状态。
65.具体来讲,在将n个星空灯点亮时,可以根据n个星空灯的地址,将n个星空灯点亮;根据剩余星空灯中的每个星空灯的地址,控制剩余星空灯处于熄灭状态。
66.在实际应用过程中,确定n个星空灯和剩余星空灯之后,车身控制器会自动生成将n个星空灯进行点亮及剩余星空灯熄灭的控制命令,再将控制命令发送给星空顶棚ecu,星空顶棚ecu根据控制命令,获取控制命令中的n个星空灯的地址,将n个星空灯点亮;以及获取控制命令中的剩余星空灯中的每个星空灯的地址,控制剩余星空灯处于熄灭状态。
67.若星空播放数据为星空视频数据时,由于视频数据由多帧数据帧图片组成,如此,可以依次对多帧数据帧图片进行处理,持续对星空灯阵列中的星空灯的点亮和熄灭控制,在处理完最后一帧数据帧图片之后,再从第一帧数据帧图片进行处理,如此循环往复,不断发送处理后的报文数据,就可实现星空顶棚按车辆使用者载入的星空视频进行动态点亮的效果。
68.在实际应用过程中,如图2所示,本说明书实施例提供的汽车星空顶棚图像的处理方法应用在汽车星空顶棚图像投影系统中,该系统包括多媒体系统20、车身控制器30、星空顶棚ecu40和星空灯阵列50组成,其中,多媒体系统20包括多媒体显示屏201、多媒体文件库202和星空顶图像处理应用程序203,当然,星空顶图像处理应用程序203也可以部署在车身控制器30中,本说明书不作具体限制。
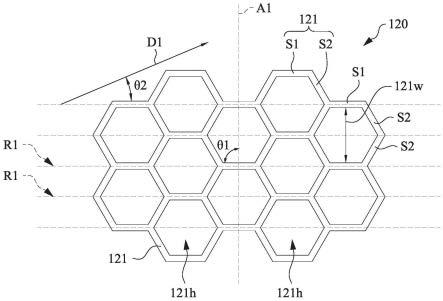
69.其中,该投影系统还包括四门状态采集微动开关60,用于触发点亮每个星空灯,四门状态采集微动开关60与车身控制器30电性连接;以及,星空灯阵列包括灯头501其地址为x0,y0;灯头502其地址为x1,y0;灯头503其地址为x2,y0;灯头504其地址为x0,y1;灯头505其地址为x1,y1;灯头506其地址为x2,y1。
70.具体来讲,首先有车辆使用完成数据载入,在星空顶图像处理应用程序203中载入视频或图片数据,星空顶图像处理应用程序203通过以下步骤对图片进行处理,并以弹窗方式反馈操作者数据录入成功与否,具体包括以下步骤:
71.a1、载入的数据是视频文件,则先对视频按500ms的时间(减少视频提取出来的图片占据过多的内存消耗)进行数据提取,获得数据帧图片后,把提取到的图片先按提取时间进行储存;若载入的为图片,则直接进行储存;
72.a2、建立坐标:根据储存的数据可获取其分辨率,从图片的第一个像素点作为起始位置,建立一个与分辨率长度匹配的空二维数组来定义图片的坐标;
73.a3、获取色值:获取每张图的每个像素点的rgb颜色值,并用二维数组的地址来存储对应像素坐标中的rgb颜色值;
74.a4、勾勒边界:利用算法对相邻rgb颜色值进行比较,得出像素突变较大的像素点,勾勒出图像的素描边界;
75.a5、映射投影:根据星空顶棚的灯头排布情况,先拟定灯头二维坐标,并把其分辨率录入星空顶图像处理应用程序,把勾勒出的素描边界按比例映射到星空顶棚灯头的二维坐标中;根据映射结果,得出一组需要星空顶的点亮的灯头地址,剩下的就是灯头不点亮的灯头地址;
76.a6、输出控制:接下来多媒体系统20把点亮与不点亮的灯头地址转化为汽车can总线报文,利用多帧方式传输给车身控制器30;车身控制器30再把总线报文转化成lin总线报文发送给星空顶棚ecu40,星空顶棚ecu40进行多帧报文解析,得出完整的需要控制点亮和熄灭的灯头地址,驱动需要点亮的灯头,完成控制。
77.在实际应过程中,只要星空顶开关未关闭,就不断对储存的图片进行处理,持续对星空顶的点亮控制;若处理的是视频数据,则会重复a3到a6的处理步骤依次处理完每一张图片后,再回到初始状态对第一张照片进行处理,如此循环往复,不断发送处理后的报文数据,就可实现星空顶按车辆使用者载入的视频进行动态点亮的效果。
78.如图3所示,为本说明书提供汽车星空顶棚图像投影系统的点亮逻辑的流程示意图,包括以下步骤:b1、载入数据;在载入数据之后,若是视频数据,则执行步骤b2-b3;若是图片,则直接执行步骤b3;其中,步骤b2、提取图片;接下来执行步骤b3、存储图片;在存储图片之后,执行步骤b4、建立坐标;以及建立坐标之后,执行步骤b5、获取色值;以及在获取色值之后,执行步骤b6、勾勒边界;在勾勒边界之后,执行步骤b7、映射投影;在映射投影之后,执行步骤b8、输出;在执行步骤b8之后,执行步骤b9、判断是否为视频;若是,则针对下一帧图片依次执行b5-b9;若不是,则执行步骤b10、判断是否关闭星空顶,若否,则返回执行b4-b9。
79.本技术实施例中的上述一个或至少一个技术方案,至少具有如下技术效果:
80.基于上述技术方案,根据获取的星空播放数据中的像素数据,建立二维数组,并在所述二维数组中每个像素数组的存储地址中存储该像素对应的颜色值;根据所述二维数组的存储地址存储的颜色值,从所述二维数组中确定用于进行星空投影的n个二维数据;根据所述n个二维数据,从所述星空顶棚中的星空灯阵列中获取与所述n个二维数据对应的n个星空灯;将所述星空灯阵列中的所述n个星空灯点亮,以及控制剩余星空灯处于熄灭状态;如此,可以将获取的星空播放数据,将星空顶棚中的星空灯阵列中的n个星空灯点亮,以及控制剩余星空灯处于熄灭状态,从而实现了根据自行设定的星空图片点亮星空顶棚,满足了用户的个性化需求,使得用户的体验更好。
81.针对上述实施例提供一种汽车星空顶棚图像的处理方法,本技术实施例还对应一种汽车星空顶棚图像的处理装置,如图4所示,所述装置包括:
82.数组创建单元401,用于根据获取的星空播放数据中的像素数据,建立二维数组,并在所述二维数组中每个像素数组的存储地址中存储该像素对应的颜色值;
83.二维数据获取单元402,用于根据所述二维数组的存储地址存储的颜色值,从所述二维数组中确定用于进行星空投影的n个二维数据,其中,n为大于1的整数;
84.星空灯确定单元403,用于根据所述n个二维数据,从所述星空顶棚中的星空灯阵列中获取与所述n个二维数据对应的n个星空灯;
85.星空灯控制单元404,用于将所述星空灯阵列中的所述n个星空灯点亮,以及控制剩余星空灯处于熄灭状态,其中,所述剩余星空灯为所述星空灯阵列中除所述n个星空灯之外的星空灯。
86.在一种可选的实施方式中,数组创建单元401,用于若所述星空播放数据为视频数据,则将所述星空播放数据按设定时长进行数据提取,获取数据帧图片集;针对所述数据帧图片集中每个数据帧图片中的像素数据,建立所述二维数组。
87.在一种可选的实施方式中,数组创建单元401,用于针对所述数据帧图片集中每个数据帧图片,根据数据帧图片的分辨率,建立一个与数据帧图片的分辨率匹配的二维坐标;根据数据帧图片中的每个像素的所在位置,获取每个像素在建立的所述二维坐标的二维数据;根据每个像素的二维数据,建立所述二维数组。
88.在一种可选的实施方式中,二维数据获取单元402,用于根据所述二维数组的存储地址存储的颜色值,将所述二维数组中每相邻两个像素的颜色值进行比对,获取颜色变化值大于设定值的n个像素;从所述二维数组中获取所述n个像素对应的二维数据作为所述n个二维数据。
89.在一种可选的实施方式中,还包括:
90.素描边界获取单元,用于在从所述二维数组中确定用于进行星空投影的n个二维数据之后,根据所述n个二维数据,确定投影素描边界。
91.在一种可选的实施方式中,星空灯确定单元403,用于建立所述星空灯阵列的星空坐标系;将所述投影素描边界按比例映射到所述星空坐标系中,获取所述n个二维数据映射的n个星空灯坐标;获取所述n个星空灯坐标对应的所述n个星空灯。
92.在一种可选的实施方式中,星空灯控制单元404,用于根据所述n个星空灯的地址,将所述n个星空灯点亮;根据所述剩余星空灯中的每个星空灯的地址,控制所述剩余星空灯处于所述熄灭状态。
93.关于上述实施例中的装置,其中各个模块执行操作的具体方式已经在有关该方法的实施例中进行了详细描述,此处将不做详细阐述说明。
94.针对上述实施例提供一种汽车星空顶棚图像的处理,本技术实施例还对应提供了一种车辆,包括车辆本体、星空顶棚和设置在所述车辆本体中的如上述汽车星空顶棚图像的处理装置。
95.本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本技术旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
96.应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制
97.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。