1.本发明提供一种训练孩子独自回家的智能脚步踏板装置,它适用于防止儿童拐卖风险和锻炼儿童的独立自主能力。
背景技术:
2.独立自主是对一个人的成长发展所必备的能力要求.独立性是孩子一生健康发展根本依据.意大利著名教育家蒙台梭利就对孩子独立性的培养十分重视,她说过:"教育首先要引导孩子沿着独立性的道路前进和发展."孩子到了两三岁,独立意识萌生阶段,什么事情都好奇并且想亲自去体验一下,不管这些体验有何后果,都体现了孩子积极认识世界的意识,表现力量和自信心的愿望,所以初级教育者应该成为儿童发展的观察者,引导者,援助者.独立性是时代对儿童的要求。
3.但是,现在家庭中的很多孩子,衣来伸手、饭来张口,自主独立能力很差。缺少独立自主能力的孩子,他们的性格胆怯懦弱,习惯躲在成人的背后求得安全。他们害怕一个人独处,而且不相信自己能独立做好一件事,几乎事事都要大人帮助他们来完成。上学后,他们的课堂作业也习惯让父母或别人来帮助,甚至代替完成,导致一个缺乏独立性的孩子是不能够很好的适应社会发展需要的.今天的孩子将面临的是社会变化更加剧烈,科技发展突飞猛进,他们需要独立思考,判断,选择,解决问题的能力,否则将难以适应社会发展。
4.因此,本发明提供了一种训练孩子独自回家的智能脚步踏板装置,以解决上述背景技术中提出的问题。
技术实现要素:
5.本发明的目的在于提供一种训练孩子独自回家的智能脚步踏板装置,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:
7.一种训练孩子独自回家的智能脚步踏板装置,包括逻辑算法控制系统,所述逻辑算法控制系统顶部连接有信息输入系统;
8.所述信息输入系统顶部分别连接有加速度传感模块、路况模块和步态检测模块,所述逻辑算法控制系统底部连接有实时显示系统;
9.所述逻辑算法控制系统侧面连接有评价系统,评价系统底部和实时显示系统相互连接;
10.所述实时显示系统一侧连接有个体决策,个体决策顶部和信息输入系统相互连接。
11.优选的:所述实时显示系统底部连接有控制模块。
12.优选的:所述步态检测模块由姿态传感器和压力传感器组成,并姿态传感器共为四个,压力传感器共为两个。
13.优选的:所述加速度传感模块由三轴加速器和三轴陀螺仪传感器组成,并设有两
个六轴传感器。
14.与现有技术相比,本发明的有益效果是:
15.本发明,实时、在线真实场景模拟,让训练真实化,智能的传感探测,使用个性化的训练,多维的综合评价系统,训练体系更加科学、有效,该系统装置能够通过模拟锻炼孩子独立回家的能力,从而提高孩子的独立性和生活能力,为将来走向社会提供有力帮助。
16.本发明,具有帮助孩子健康成长,并锻炼孩子生活技能,因为父母要狠心,忍着内心的痛苦,才是负责任的爱,所以要家长培养孩子的独立性,可以先从日常生活中的琐事开始做起,锻炼孩子独立自己吃饭,独立自主穿衣服、独立自主洗漱,开始上小学时,训练独立自主回家,独立自主放学回家的习惯形成需要漫长的过程,随着传感技术及智能算法系统可以通过智能训练系统,让孩子先做回家场景模拟试验,加强回家路程的熟悉过程和应对事件处理能力的问题。
附图说明
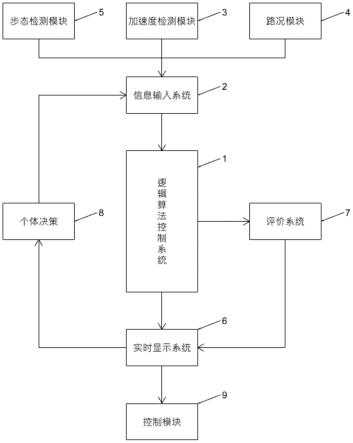
17.图1是本技术实施例1提供的一种训练孩子独自回家的智能脚步踏板装置的立体结构示意图。
18.图中:
19.1、逻辑算法控制系统;2、信息输入系统;3、加速度传感模块;4、路况模块;
20.5、步态检测模块;6、实时显示系统;7、评价系统;8、个体决策;9、控制模块。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.实施例1:
23.请参阅图1,本发明实施例中,一种训练孩子独自回家的智能脚步踏板装置,包括逻辑算法控制系统1,所述逻辑算法控制系统1顶部连接有信息输入系统2;
24.所述信息输入系统2顶部分别连接有加速度传感模块3、路况模块4和步态检测模块5,所述逻辑算法控制系统1底部连接有实时显示系统6;
25.所述逻辑算法控制系统1侧面连接有评价系统7,评价系统7底部和实时显示系统6相互连接;
26.所述实时显示系统6一侧连接有个体决策8,个体决策8顶部和信息输入系统2相互连接;
27.所述实时显示系统6底部连接有控制模块9;
28.所述步态检测模块5由姿态传感器和压力传感器组成,并姿态传感器共为四个,压力传感器共为两个;
29.所述加速度传感模块3由三轴加速器和三轴陀螺仪传感器组成,并设有两个六轴传感器;
30.本发明工作原理为:
31.通过实时在线的智能采集模块结合个体决策8信息,在线融合多模数据,通过算法系统给出实时回程反馈数据,最终给出回家任务评价结果,其主要包括几个部分:步态检测模块5、加速度传感模块3、路况模块4、信息输入系统2、个体决策8、逻辑算法控制系统1、评价系统7、实时显示系统6和控制模块9组成;
32.所述步态检测模块块5是由姿态传感器和压力传感器组成,具体有四个姿态传感器和两个压力传感器构成,通过双模态数据的融合输出系统所需的步长和步频参考信息;
33.所述加速度传感模块3是由三轴加速器和三轴陀螺仪传感器组成,具体采用两个此六轴传感构成,分布在左右踏板上,通过对两传感器的数据分析输出系统所需的加速度参考信息;
34.所述信息输入系统2是融合了个体决策信息、步态信息、加速度信息和路况信息构建的输入参考信息,并以此作为逻辑算法控制系统1判断的依据;
35.所述个体决策8是信息反馈和交互的核心,个人决策8基于实时显示系统6的反馈数据,通过智能语音识别输入信息系统所需的控制指令,所输出的控制指令包括:目的地信息,开始/结束/暂停信息,转向信息等;
36.所述逻辑算法控制系统1是基于的输入个体决策信息、步态信息、加速度信息和路况信息,计算出个体行驶速度,结合实时导航地图,实时输出所在位置和周边环境到反馈实时显示系统6上,并以此作为指导个体决策的信息来源,从而逐步完成回家任务。
37.所述评价系统7是基于个体决策信息、步态信息、加速度信息和路况信息综合给出了完成此次任务得分情况,实施满分100分制,其中个人决策体决策信息、步态信息、加速度信息和路况信息比例为40:20:20:20;
38.个人决策信息评分项依据:是否说出正确的家庭地址和转弯时是否选择正确综合判断;
39.步态信息评分项依据:是否在马路上停留玩耍综合判断;
40.步态信息评分项依据:是否在马路上奔跑综合判断;
41.路况信息评分项依据:在过马路时,是否根据红绿灯指示行驶综合判断;
42.因此本发明通过一种训练孩子独立回家脚步智能踏板,实时、在线模拟孩子回家场景,锻炼了孩子的独立自主能力;
43.实时显示系统6采用32寸led,脚踏板装有两个脚底压力传感器(fs insw99)和两个六轴加速度传感器(mpu6050),四个姿态传感器(icm20948)附着在弹性绑带上;
44.试验期间放置在脚踝处和小腿处各一个,学生个体通过麦克风说出自己的家庭或者目的地位置(道路或小区),系统会自动并智能计算出回家线路,并在按下开始开关后,系统开始进入导航和模拟实时道路情况,使用者需要踩上脚步踏板并开始模拟行走;
45.在需要转弯的时候,要求学生说出转弯选择方向;如果方向错误且一直行走,系统会提示错误并予以纠正返回;
46.个人通过实时的显示系统输出的结果,不断地做出判断,逐渐完成回家的任务。系统内部会根据整个过程个体选择判断结果给出一个综合评分,根据评分是否在继续训练,从而实现训练独立回家的能力和独立自主做事的能力;
47.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其
发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
