1.本公开涉及一种清洗机器人。
背景技术:
2.在对幕墙玻璃进行清洗的过程中,清洗机器人可以通过真空负压吸附的方式吸附至幕墙玻璃上,并且通过驱动轮,清洗机器人可以在幕墙玻璃上进行行走,并且在行走的同时可以通过清洗液体和刷毛等对玻璃进行清洗。
3.但是由于幕墙玻璃之间可能存在接缝或者连接结构等,因此可能会对清洗机器人的吸附和行走造成阻碍。为了保证清洗机器人对幕墙玻璃进行正常的清洗,在遇到这些障碍时,需要控制清洗机器人越过这些障碍,以防止清洗机器人的坠落等。
技术实现要素:
4.为了解决上述技术问题之一,本公开提供了一种清洗机器人。
5.根据本公开的一个方面,一种清洗机器人,能够用于对幕墙玻璃进行清洗,包括:
6.第一主体部,所述第一主体部设置有第一主体行走驱动部;
7.第二主体部,所述第二主体部设置有第二主体行走驱动部,其中通过第一主体行走驱动部和第二主体行走驱动部来驱动清洗机器人在所述幕墙玻璃上进行行走;以及
8.升降部,所述升降部与所述第一主体部和第二主体部连接,并且能够对第一主体部和第二主体部进行升降控制,
9.其中,在所述清洗机器人对所述幕墙玻璃进行清洗的过程中,当遇到前方障碍时,所述升降部能够控制第一主体部和第二主体部进行升降以便使得所述清洗机器人越过所述前方障碍。
10.根据本公开的至少一个实施方式,所述升降部包括第一升降机构和第二升降机构,所述第一升降机构与所述第一主体部固定连接并且所述第二升降机构与所述第二主体部固定连通,通过所述第一升降机构控制所述第一主体部进行升降,并且通过第二升降机构控制所述第二主体部进行升降。
11.根据本公开的至少一个实施方式,所述第一升降机构和第二升降机构分别包括丝杠和驱动电机,通过第一升降机构的驱动电机来控制第一升降机构的丝杠进行转动来控制第一主体部的升降,通过第二升降机构的驱动电机来控制第二升降机构的丝杠进行转动来控制第二主体部的升降。
12.根据本公开的至少一个实施方式,所述第一主体行走驱动部包括第一行走驱动部和第二行走驱动部,并且所述第一行走驱动部和第二行走驱动部设置在所述第一主体部的两侧,所述第一行走驱动部和第二行走驱动部分别包括外侧履带,可选地,该外侧履带由与所述幕墙玻璃具有预定摩擦系数的材料制成;
13.所述第二主体行走驱动部包括第三行走驱动部和第四行走驱动部,并且所述第三行走驱动部和第四行走驱动部设置在所述第二主体部的两侧,可选地,所述第三行走驱动
部和第四行走驱动部分别包括外侧履带,该外侧履带由与所述幕墙玻璃具有预定摩擦系数的材料制成。
14.根据本公开的至少一个实施方式,所述第一主体部设置有第一吸附部,并且所述第一吸附部能够与所述幕墙玻璃形成负压腔,以便将所述清洗机器人吸附至所述幕墙玻璃上;
15.所述第二主体部设置有第二吸附部,并且所述第二吸附部能够与所述幕墙玻璃形成负压腔,以便将所述清洗机器人吸附至所述幕墙玻璃上。
16.根据本公开的至少一个实施方式,所述清洗机器人还包括清洗部,所述清洗部包括滚刷和喷液口,所述滚刷设置至所述第一主体部的前侧,所述喷液口用于向所述幕墙玻璃提供清洗液体。
17.根据本公开的至少一个实施方式,所述滚刷包括第一滚刷和第二滚刷,并且所述第一滚刷和第二滚刷能够可拆卸地连接,以便安装至所述清洗机器人和/或从所述清洗机器人拆离。
18.根据本公开的至少一个实施方式,所述清洗机器人包括检测部,所述检测部至少能够检测所述前方障碍的位置和/或高度,以便通过所述前方障碍的位置和/或高度来控制所述升降部。
19.根据本公开的至少一个实施方式,所述检测部用于检测所述前方障碍的高度,以便根据所述高度,来控制所述升降部,以使得所述第一主体部和第二主体部的高度大于或等于所述前方障碍的高度。
20.根据本公开的至少一个实施方式,所述清洗机器人包括旋转杆,所述旋转杆通过摆座连接至所述第二主体部,所述旋转杆能够相对于所述摆座进行转动,并且所述旋转杆具有中空结构,该中空结构至少用于允许水电管线通过。
附图说明
21.附图示出了本公开的示例性实施方式,并与其说明一起用于解释本公开的原理,其中包括了这些附图以提供对本公开的进一步理解,并且附图包括在本说明书中并构成本说明书的一部分。
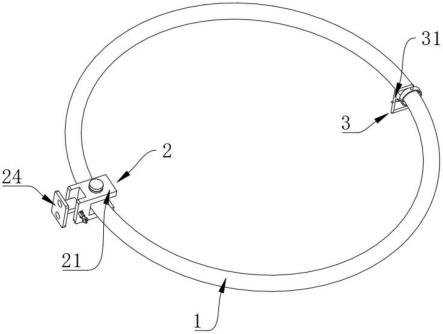
22.图1示出了根据本公开的一个实施方式的清洗机器人的示意图。
23.图2示出了根据本公开的一个实施方式的清洗机器人的示意图。
24.图3示出了根据本公开的一个实施方式的清洗机器人的示意图。
25.图4示出了根据本公开的一个实施方式的清洗机器人的示意图。
具体实施方式
26.下面结合附图和实施方式对本公开作进一步的详细说明。可以理解的是,此处所描述的具体实施方式仅用于解释相关内容,而非对本公开的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本公开相关的部分。
27.需要说明的是,在不冲突的情况下,本公开中的实施方式及实施方式中的特征可以相互组合。下面将参考附图并结合实施方式来详细说明本公开的技术方案。
28.除非另有说明,否则示出的示例性实施方式/实施例将被理解为提供可以在实践
中实施本公开的技术构思的一些方式的各种细节的示例性特征。因此,除非另有说明,否则在不脱离本公开的技术构思的情况下,各种实施方式/实施例的特征可以另外地组合、分离、互换和/或重新布置。
29.在附图中使用交叉影线和/或阴影通常用于使相邻部件之间的边界变得清晰。如此,除非说明,否则交叉影线或阴影的存在与否均不传达或表示对部件的具体材料、材料性质、尺寸、比例、示出的部件之间的共性和/或部件的任何其它特性、属性、性质等的任何偏好或者要求。此外,在附图中,为了清楚和/或描述性的目的,可以夸大部件的尺寸和相对尺寸。当可以不同地实施示例性实施例时,可以以不同于所描述的顺序来执行具体的工艺顺序。例如,可以基本同时执行或者以与所描述的顺序相反的顺序执行两个连续描述的工艺。此外,同样的附图标记表示同样的部件。
30.当一个部件被称作“在”另一部件“上”或“之上”、“连接到”或“结合到”另一部件时,该部件可以直接在所述另一部件上、直接连接到或直接结合到所述另一部件,或者可以存在中间部件。然而,当部件被称作“直接在”另一部件“上”、“直接连接到”或“直接结合到”另一部件时,不存在中间部件。为此,术语“连接”可以指物理连接、电气连接等,并且具有或不具有中间部件。
31.为了描述性目的,本公开可使用诸如“在
……
之下”、“在
……
下方”、“在
……
下”、“下”、“在
……
上方”、“上”、“在
……
之上”、“较高的”和“侧(例如,如在“侧壁”中)”等的空间相对术语,从而来描述如附图中示出的一个部件与另一(其它)部件的关系。除了附图中描绘的方位之外,空间相对术语还意图包含设备在使用、操作和/或制造中的不同方位。例如,如果附图中的设备被翻转,则被描述为“在”其它部件或特征“下方”或“之下”的部件将随后被定位为“在”所述其它部件或特征“上方”。因此,示例性术语“在
……
下方”可以包含“上方”和“下方”两种方位。此外,设备可被另外定位(例如,旋转90度或者在其它方位处),如此,相应地解释这里使用的空间相对描述语。
32.这里使用的术语是为了描述具体实施例的目的,而不意图是限制性的。如这里所使用的,除非上下文另外清楚地指出,否则单数形式“一个(种、者)”和“所述(该)”也意图包括复数形式。此外,当在本说明书中使用术语“包含”和/或“包括”以及它们的变型时,说明存在所陈述的特征、整体、步骤、操作、部件、组件和/或它们的组,但不排除存在或附加一个或更多个其它特征、整体、步骤、操作、部件、组件和/或它们的组。还要注意的是,如这里使用的,术语“基本上”、“大约”和其它类似的术语被用作近似术语而不用作程度术语,如此,它们被用来解释本领域普通技术人员将认识到的测量值、计算值和/或提供的值的固有偏差。
33.根据本公开的一个实施方式,提供了一种清洗机器人,该清洗机器人可以用于清洗建筑物的幕墙。
34.图1示出了根据本公开的一个实施方式的清洗机器人10。如图1所示,该清洗机器人10可以包括第一主体部100和第二主体部200。其中第一主体部100与第二主体部200可以通过连接部300连接,该连接可以为刚性连接。
35.该清洗机器人10可以包括第一行走驱动部110和第二行走驱动部120。其中第一行走驱动部110和第二行走驱动部120可以设置至第一主体部100。第一行走驱动部110可以包括第一行走机构111和第一驱动电机112,第二行走驱动部120可以包括第二行走机构121和
第二驱动电机122。第一行走机构111和第二行走机构121可以分别设置在第一主体部100的两侧,并且第一驱动电机112和第二驱动电机122可以分别固定设置至第一主体部100,并且第一驱动电机112和第二驱动电机122可以分别用于控制第一行走机构111和第二行走机构121,以便通过控制第一行走机构111和第二行走机构121的转动来控制清洗机器人10的前进、后退和改变路线等。第一行走机构111和第二行走机构121可以分别包括行走履带,并且行走履带可以包括外侧履带,并且该外侧履带的材质可以为与幕墙玻璃具有预定摩擦系数的材料。这样当通过第一驱动电机112和第二驱动电机122对第一行走机构111和第二行走机构121进行驱动时,可以通过行走履带与幕墙玻璃之间的摩擦力来使得清洗机器人在玻璃上进行行走。另外,行走履带还可以包括内侧履带,其中内侧履带可以与第一行走机构111和第二行走机构121的传动机构配合,从而使得传动机构使得内侧履带从而带动外侧履带进行转动。另外内侧履带和外侧履带可以粘合在一起。此外,作为一个示例,在内侧履带和外侧履带之间可以设置有其他层的履带。另外,在外侧履带的表面可以设置有纹路,以便增大外侧履带与幕墙玻璃之间的摩擦系数。
36.该清洗机器人10还可以包括第三行走驱动部210和第四行走驱动部220。其中第三行走驱动部210和第四行走驱动部220可以设置至第二主体部200。第三行走驱动部210可以包括第三行走机构211和第三驱动电机212,第四行走驱动部220可以包括第四行走机构221和第四驱动电机222。第三行走机构211和第四行走机构221可以分别设置在第二主体部200的两侧,并且第三驱动电机212和第四驱动电机222可以分别固定设置至第二主体部200,并且第三驱动电机212和第四驱动电机222可以分别用于控制第三行走机构211和第四行走机构221,以便通过控制第三行走机构211和第四行走机构221的转动来控制清洗机器人10的前进、后退和改变路线等。第三行走机构211和第四行走机构221可以分别包括行走履带,并且行走履带可以包括外侧履带,并且该外侧履带的材质可以为与幕墙玻璃具有预定摩擦系数的材料。这样当通过第三驱动电机212和第四驱动电机222对第三行走机构211和第四行走机构221进行驱动时,可以通过行走履带与幕墙玻璃之间的摩擦力来使得清洗机器人在玻璃上进行行走。另外,行走履带还可以包括内侧履带,其中内侧履带可以与第三行走机构211和第四行走机构221的传动机构配合,从而使得传动机构使得内侧履带从而带动外侧履带进行转动。另外内侧履带和外侧履带可以粘合在一起。此外,作为一个示例,在内侧履带和外侧履带之间可以设置有其他层的履带。另外,在外侧履带的表面可以设置有纹路,以便增大外侧履带与幕墙玻璃之间的摩擦系数。
37.进一步地,如图2所示,清洗机器人10还可以包括第一吸附部130和第二吸附部230。其中第一吸附部130可以设置至第一主体部100并且第二吸附部230可以设置至第二主体部200。第一吸附部130可以设置在与幕墙玻璃相对应的第一主体部100的一侧,并且第二吸附部230可以设置在与幕墙玻璃相对应的第二主体部200的一侧。第一吸附部130和第二吸附部230可以通过气路管道与负压电机相连通,通过第一负压电机131和第二负压电机231的抽吸可以使得第一吸附部130和第二吸附部230形成负压腔,从而通过第一吸附部130和第二吸附部230形成的负压腔可以使得清洗机器人10吸附至幕墙玻璃上。此外,在第一吸附部130和第二吸附部230的外周可以设置有负压海绵,并且在负压海绵的内部形成真空负压腔。作为一个示例,还可以设置有负压检测部,并且该负压检测部可以用于检测负压腔的负压。第一吸附部130和第二吸附部230的数量可以为一个或两个。
38.清洗机器人10还可以包括升降部400。在清洗机器人10在幕墙玻璃上进行行走时,通过吸附部,清洗机器人10吸附在幕墙玻璃上,并且通过各个行走驱动部可以实现清洗机器人10在幕墙玻璃上进行行走。但是在行走的过程中,清洗机器人可能会遇到凸台、横梁、装饰条等各种障碍,这时清洗机器人需要越过这些障碍并且继续行走。当遇到障碍进行行走时,可以提供升降部400抬起清洗机器人10的一部分。
39.在进行升降时,可以通过升降部400将第一主体部100或者第二主体部200升起。例如在通过升降部400将第一主体部100升起的过程中,解除第一主体部100的负压吸附状态,第一主体部100可以脱离幕墙玻璃的表面,而第二主体部200依然吸附在玻璃幕墙上。通过清洗机器人10的第三行走驱动部210和第四行走驱动部220继续使得清洗机器人10行进。当第一主体部100通过障碍之后,通过升降部400使得第一主体部100降下然后吸附至幕墙玻璃上。然后解除第二主体部200的吸附状态,通过升降部400升起第二主体部200,并且通过清洗机器人10的第一行走驱动部110和第二行走驱动部120继续使得清洗机器人10行进。这样使得第二主体部200越过障碍。在第二主体部200完全越过障碍之后,可以使得第二主体部200降下,并且第二主体部200然后吸附至幕墙玻璃上继续行进。
40.作为一个具体实施例,该升降部400可以包括第一升降部410和第二升降部420,并且第一升降部410和第二升降部420可以通过连接部300进行连接。第一升降部410用于控制第一主体部100的升降,并且第二升降部420用于控制第二主体部200的升降。
41.第一升降部410可以包括第一升降机构411和第一升降控制装置412。作为示例,第一升降机构411可以为丝杆、升降气缸、液压推杆、电推杆等各种形式,并且第一升降控制装置412相应地可以为减速电机、气压控制器、液压控制器、电动推杆等相应的控制装置。第二升降部420可以包括第二升降机构421和第二升降控制装置422。作为示例,第二升降机构421可以为丝杆、升降气缸、液压推杆、电推杆等各种形式,并且第二升降控制装置422相应地可以为减速电机、气压控制器、液压控制器、电动推杆等相应的控制装置。
42.根据本公开的优选实施例,第一升降机构411和第二升降机构421可以为丝杠的形式,并且第一升降控制装置412和第二升降控制装置422可以为驱动电机。通过齿轮等传动机构将驱动电机的输出轴的转动传递至丝杠,以便通过丝杠来控制第一主体部100和第二主体部200的升降。
43.根据本公开的清洗机器人10还可以包括清洗部500。其中清洗部500可以设置在第一主体部100的前侧,并且清洗部500可以包括滚刷510和喷液口520,通过喷液口520可以向幕墙玻璃的表面提供清洗液体,并且通过滚刷510的转动来对幕墙玻璃进行清洗。其中滚刷510可以设置有刷毛,当然本领域的技术人员应当理解,滚刷510也可以为其他形式的滚刷。滚刷510可以包括第一滚刷511和第二滚刷512,并且第一滚刷511和第二滚刷512可以可拆卸地连接以便构成滚刷510。第一滚刷511和第二滚刷512可以通过插接等方式来进行连接。第一滚刷511和第二滚刷512的连接端可以设置有旋转驱动部513,该旋转驱动部例如可以是驱动齿轮,并且可以通过皮带等传动机构来通过驱动电机来转动滚刷510。清洗部500可以设置在壳体中,并且该壳体可以固定连接至第一主体部100或者与第一主体部100一体成型。
44.根据本公开的清洗机器人10还可以包括检测部,其中该检测部可以包括单线激光雷达、多线激光雷达、超声波传感器、红外传感器、碰撞开关、电阻橡胶碰撞条、视频摄像头、
和/或毫米波雷达等。
45.检测部可以包括前方障碍检测部610,其中前方障碍检测部610可以为激光雷达、超声波传感器、红外传感器等的形式。例如在图2和图4中示出了前方障碍检测部610为超声波传感器的形式。前方障碍检测部610可以设置在清洗部500的壳体的至少一侧或者两侧,并且前方障碍检测部610的检测范围可以设置成至少能够覆盖清洗机器人10的前方的部分范围或者全部范围。
46.检测部还可以包括边缘检测部620。该边缘检测部620可以设置在清洗部500的壳体的至少一侧或者两侧的位置处。其中,边缘检测部620可以为碰撞开关和/或电阻橡胶碰撞条,当清洗机器人10接触到清洗表面的边缘障碍时,可以通过对碰撞开关和/或电阻橡胶碰撞条的触发来检测边缘的障碍物。
47.检测部还可以包括悬崖检测部630。该悬崖检测部630可以设置有一个或者两个以上,以便当清洗机器人10行走至幕墙玻璃的边缘之后,可以通过悬崖检测部630对幕墙玻璃的边缘进行检测,以便控制清洗机器人10的行进,防止清洗机器人10从幕墙玻璃跌落。悬崖检测部630可以设置在清洗部500的壳体上。该悬崖检测部630可以为激光雷达、超声波传感器、红外传感器等的形式。
48.检测部还可以包括视频摄像部640。其中,该视频摄像部640可以设置在第一主体部100上,并且视频摄像部640可以进行360度转动,以便对清洗机器人10所处的环境进行视频采集。此外,视频摄像部640可以采用毫米波雷达等进行替换。
49.综上,前方障碍检测部610可以设置在清洗机器人10的前侧,并且边缘检测部620可以设置在清洗机器人10的一侧或者两侧的边缘处,悬崖检测部630可以设置在清洗机器人10的下侧,并且视频摄像部640可以设置在清洗机器人10的上侧。
50.根据本公开的进一步实施例,清洗机器人10可以包括主控制器,并且该主控制器可以接收检测部的检测信号,并且主控制器可以根据所接收的检测信号来对清洗机器人10进行控制,例如当前方障碍检测部610检测到前方障碍时、边缘检测部620检测到边缘障碍时、和/或悬崖检测部630检测到幕墙玻璃的边缘时,可以控制清洗机器人10进行路线改变等。
51.此外,在本公开中,在清洗机器人10的行走过程中,当检测部检测到前方存在障碍的情况下,例如可以通过前方障碍检测部610和/或视频摄像部640来对前方障碍进行检测,例如可以检测前方障碍的位置和/或高度。清洗机器人10可以根据所检测的前方障碍的位置和高度情况,来通过升降部400控制第一主体部100和第二主体部200的升降位置和/或升降高度等。
52.当检测部检测到前方存在障碍时,清洗机器人10可以停止清洗作业并且停止行驶。通过升降部400可以升起第一主体部100(停止第一主体部100的吸附状态),当第一主体部100升至预定高度之后,可以控制清洗机器人10进行行进,并且在第一主体部100越过前方障碍之后,通过升降部400控制第一主体部100降下,并且吸附至幕墙玻璃上,然后通过升降部将第二主体部200升起预定高度(停止第二主体部200的吸附状态)。然后清洗机器人10继续行进,直至第二主体部200越过前方障碍,然后降下并且吸附至幕墙玻璃上,之后清洗机器人10继续进行清洗作业。
53.进一步地,清洗机器人10还可以包括旋转杆700,旋转杆700可以连接至摆座710,
并且摆座710可以通过连接机构固定连接至第二主体部200,优选地连接至第二主体部200的后侧。旋转杆700可以为中空结构,并且水电管线、绳索等可以穿过该中空结构。这样可以通过绳索等对清洗机器人10进行牵引。通过水电管线可以为清洗机器人10提供清洗液体并且提供电能。
54.本公开的清洗机器人在作业过程中通过缝隙等障碍的情况下,避免出现真空负压腔漏气、负压减小等问题,通过第一主体部和第二主体部的交替升降,从而使得保持清洗机器人吸附在幕墙玻璃的情况下,来实现清洗机器人的行进。从而增强对作业环境的适应能力,提高作业覆盖率;通过检测模块实现对障碍位置和/或高度的检测,提高了整体的自动化程度,并且避免造成安全隐患等。
55.在本说明书的描述中,参考术语“一个实施例/方式”、“一些实施例/方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例/方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例/方式或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例/方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例/方式或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例/方式或示例以及不同实施例/方式或示例的特征进行结合和组合。
56.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
57.本领域的技术人员应当理解,上述实施方式仅仅是为了清楚地说明本公开,而并非是对本公开的范围进行限定。对于所属领域的技术人员而言,在上述公开的基础上还可以做出其它变化或变型,并且这些变化或变型仍处于本公开的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。