1.本实用新型属于机械制造技术领域,尤其涉及一种圆柱体工件端面与圆柱面垂直度测量装置。
背景技术:
2.在机械制造行业,圆柱体工件在机械加工后需要进行端面与圆柱面的垂直度检测,圆柱体工件的两端为平面,平面要求与圆柱体中轴线(圆柱面的中心线)垂直,对该对垂直度检测的精度和效率要求较高,然而实际当中平面度检测仪大多比较昂贵,操作复杂,不便于在车间生产线推广。
技术实现要素:
3.本实用新型为了解决现有技术中的不足之处,提供一种结构紧凑、操作简便、测量精度高、效率高的圆柱体工件端面与圆柱面垂直度测量装置。
4.为解决上述技术问题,本实用新型采用如下技术方案:一种圆柱体工件端面与圆柱面垂直度测量装置,包括电子显示屏和底座,底座上设有安装架、前v型块和后v型块,安装架位于前v型块和后v型块的左侧,前v型块和后v型块前后对应设置,前v型块和后v型块之间形成顶部敞口、左右通透的v型槽,安装架右侧设有定位销和回弹式位移传感器,定位销位于回弹式位移传感器下方,定位销和回弹式位移传感器均沿左右水平方向设置,定位销右端位于v型槽左端口下侧,回弹式位移传感器的测量触头位于v型槽上方,回弹式位移传感器通过数据信号线与电子显示屏连接。
5.底座上表面设有沿前后方向贯通的燕尾槽,前v型块和后v型块底部分别设有滑动装配在燕尾槽内的燕尾滑块,底座上设有用于驱动前v型块和后v型块相对移动的动力驱动装置。
6.动力驱动装置包括前固定座、后固定座、丝杆和手轮,前固定座和后固定座的底部均固定设在底座上,前固定座位于前v型块前方,后固定座位于后v型块后方,丝杆沿前后方向水平设置,丝杆前端和后端分别转动连接在前固定座和后固定座上,前v型块和后v型块内部下侧分别开设有前后对应通透的前螺纹孔和后螺纹孔,丝杆穿过并分别与前螺纹孔和后螺纹孔螺纹连接,前螺纹孔的螺纹旋向和后螺纹孔的螺纹旋向相反,手轮设在丝杆的前端并位于前固定座前方。
7.丝杆上设有位于前v型块和后v型块之间的限位销,限位销沿丝杆的径向方向设置,限位销与定位销同在一个垂直面上,限位销分别与前v型块后侧面和后v型块前侧面的距离相等。
8.采用上述技术方案,在对圆柱体工件进行测量作业前,先进行测量装置的校准工作。将标准的圆柱体量块放置在前v型块和后v型块之间的v型槽内,实现了对圆柱体量块的径向定位,将圆柱体量块沿v型槽缓慢向定位销方向推进,圆柱体量块左端面同时接触到定位销和回弹式位移传感器的测量触头后,调整电子显示屏,使电子显示屏的示数调整为零。
然后取下圆柱体量块,将被测的圆柱体工件放置在前v型块和后v型块之间的v型槽内,实现对圆柱体工件径向定位,然后将圆柱体工件沿v型槽缓慢向定位销方向推进,圆柱体工件左端面同时接触到定位销和回弹式位移传感器的测量触头后,若圆柱体工件端面与圆柱面不垂直,此时位移传感器的测试出的位移量就是端面与圆柱面的垂直度,在电子显示屏上显示出来。然后向右移动圆柱体工件,圆柱体工件左端面与定位销和回弹式位移传感器的测量触头脱离后,在v型槽内旋转圆柱体工件一定角度,再向左移动圆柱体工件,圆柱体工件左端面同时接触到定位销和回弹式位移传感器的测量触头,第二次测量出端面与圆柱面的垂直度。按照这种操作方式,多次旋转圆柱体工件,对圆柱体工件的端面与圆柱面的垂直度多次测量,以达到更加精准的目的。
9.当需要对不同直径的圆柱体工件进行测量时,需要调整前v型块和后v型块之间的距离,即v型槽的宽度,转动手轮,驱动丝杆转动,与由于前螺纹孔和后螺纹孔的螺纹旋向相反,丝杆螺纹连接的前v型块和后v型块同时相对移动或相背移动(即前v型块向前移动时后v型块向后移动,或者前v型块向后移动时后v型块向前移动),这样就可调整v型槽的宽度。
10.前v型块和后v型块底部分别设有滑动装配在燕尾槽内的燕尾滑块,这样可保证前v型块和后v型块在前后移动时的稳定性。
11.电子显示屏和回弹式位移传感器均为现有技术,在市场上可购置,具体结构及工作原理不再赘述。
12.综上所述,本实用新型原理科学,结构简单,方便操作,检测垂直度精确度高,适用于不同直径的圆柱体工件端面与圆柱面垂直度的测量,并且测量效率大大提高。
附图说明
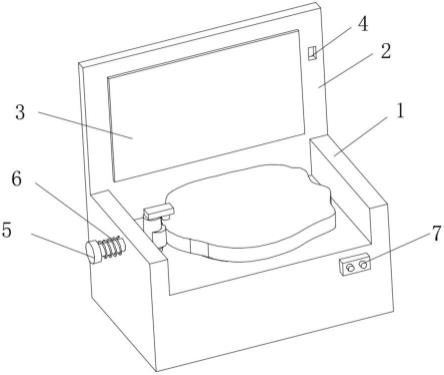
13.图1是本实用新型的整体结构示意图;
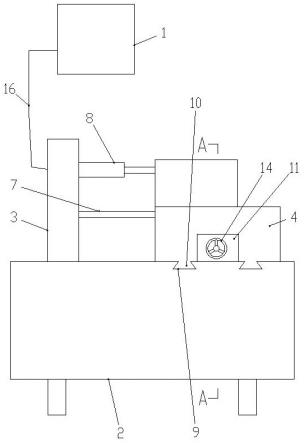
14.图2是图1中a-a剖视图。
具体实施方式
15.如图1和图2所示,本实用新型的一种圆柱体工件端面与圆柱面垂直度测量装置,包括电子显示屏1和底座2,底座2上设有安装架3、前v型块4和后v型块5,安装架3位于前v型块4和后v型块5的左侧,前v型块4和后v型块5前后对应设置,前v型块4和后v型块5之间形成顶部敞口、左右通透的v型槽6,安装架3右侧设有定位销7和回弹式位移传感器8,定位销7位于回弹式位移传感器8下方,定位销7和回弹式位移传感器8均沿左右水平方向设置,定位销7右端位于v型槽6左端口下侧,回弹式位移传感器8的测量触头位于v型槽6上方,回弹式位移传感器8通过数据信号线16与电子显示屏1连接。
16.底座2上表面设有沿前后方向贯通的燕尾槽9,前v型块4和后v型块5底部分别设有滑动装配在燕尾槽9内的燕尾滑块10,底座2上设有用于驱动前v型块4和后v型块5相对移动的动力驱动装置。
17.动力驱动装置包括前固定座11、后固定座12、丝杆13和手轮14,前固定座11和后固定座12的底部均固定设在底座2上,前固定座11位于前v型块4前方,后固定座12位于后v型块5后方,丝杆13沿前后方向水平设置,丝杆13前端和后端分别转动连接在前固定座11和后固定座12上,前v型块4和后v型块5内部下侧分别开设有前后对应通透的前螺纹孔和后螺纹
孔,丝杆13穿过并分别与前螺纹孔和后螺纹孔螺纹连接,前螺纹孔的螺纹旋向和后螺纹孔的螺纹旋向相反,手轮14设在丝杆13的前端并位于前固定座11前方。
18.丝杆13上设有位于前v型块4和后v型块5之间的限位销15,限位销15沿丝杆13的径向方向设置,限位销15与定位销7同在一个垂直面上,限位销15分别与前v型块4后侧面和后v型块5前侧面的距离相等。
19.在对圆柱体工件进行测量作业前,先进行测量装置的校准工作。将标准的圆柱体量块放置在前v型块4和后v型块5之间的v型槽6内,实现了对圆柱体量块的径向定位,将圆柱体量块沿v型槽6缓慢向定位销7方向推进,圆柱体量块左端面同时接触到定位销7和回弹式位移传感器8的测量触头后,调整电子显示屏1,使电子显示屏1的示数调整为零。然后取下圆柱体量块,将被测的圆柱体工件放置在前v型块4和后v型块5之间的v型槽6内,实现对圆柱体工件径向定位,然后将圆柱体工件沿v型槽6缓慢向定位销7方向推进,圆柱体工件左端面同时接触到定位销7和回弹式位移传感器8的测量触头后,若圆柱体工件端面与圆柱面不垂直,此时位移传感器的测试出的位移量就是端面与圆柱面的垂直度,在电子显示屏1上显示出来。然后向右移动圆柱体工件,圆柱体工件左端面与定位销7和回弹式位移传感器8的测量触头脱离后,在v型槽6内旋转圆柱体工件一定角度,再向左移动圆柱体工件,圆柱体工件左端面同时接触到定位销7和回弹式位移传感器8的测量触头,第二次测量出端面与圆柱面的垂直度。按照这种操作方式,多次旋转圆柱体工件,对圆柱体工件的端面与圆柱面的垂直度多次测量,以达到更加精准的目的。
20.当需要对不同直径的圆柱体工件进行测量时,需要调整前v型块4和后v型块5之间的距离,即v型槽6的宽度,转动手轮14,驱动丝杆13转动,与由于前螺纹孔和后螺纹孔的螺纹旋向相反,丝杆13螺纹连接的前v型块4和后v型块5同时相对移动或相背移动(即前v型块4向前移动时后v型块5向后移动,或者前v型块4向后移动时后v型块5向前移动),这样就可调整v型槽6的宽度。
21.前v型块4和后v型块5底部分别设有滑动装配在燕尾槽9内的燕尾滑块10,这样可保证前v型块4和后v型块5在前后移动时的稳定性。
22.限位销15起到对前v型块4向后和后v型块5向前移动时限位的作用,避免前v型块4和后v型块5接触而使丝杆13上在限位销15前后侧的不同旋向螺纹产生磨损。
23.电子显示屏1和回弹式位移传感器8均为现有技术,在市场上可购置,具体结构及工作原理不再赘述。另外,回弹式位移传感器8检测的数据通过数据信号线16传输到电子显示屏1,电子显示屏1内部的模块通过一定的算法得出的示数,这一过程不需要新的计算机程序。
24.以上所述仅为本实用新型的优选实施例而已,本实施例中的叙述的各部件的设置位置及相应方向,仅仅便于本领域技术人员对技术方案的理解,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。