1.本发明涉及镶嵌线绘制领域,尤其涉及一种镶嵌线的绘制方法、设备、介质及产品。
背景技术:
2.按照国务院对地理监测工作总体部署,对地理国情的信息要素已进入常态化监测阶段,因此数字正射影像的制作尤为重要。数字正射影像的制作过程中通常是同时采用单个季度、多时相、不同卫星的遥感影像作为底图数据,通过绘制好的镶嵌线进行镶嵌的方法,拼接成为作业区的底图数据。在传统的镶嵌线绘制作业的过程中,需要作业员通过对两幅及以上的影像进行对比查看,并根据地形、地貌、地物走势等情况综合研判镶嵌线的走向,并通过数字绘图软件手动绘制到作业图层上,过程费时费力。
技术实现要素:
3.为了克服现有技术的不足,本发明的目的之一在于提供一种镶嵌线的绘制方法,其能解决现有的镶嵌线绘制方法需要作业员通过对两幅及以上的影像进行对比查看,并根据地形、地貌、地物走势等情况综合研判镶嵌线的走向,整个绘制过程费时费力的问题。
4.本发明的目的之二在于提供一种电子设备,其能解决现有的镶嵌线绘制方法需要作业员通过对两幅及以上的影像进行对比查看,并根据地形、地貌、地物走势等情况综合研判镶嵌线的走向,整个绘制过程费时费力的问题。
5.本发明的目的之三在于提供一种计算机可读存储介质,其能解决现有的镶嵌线绘制方法需要作业员通过对两幅及以上的影像进行对比查看,并根据地形、地貌、地物走势等情况综合研判镶嵌线的走向,整个绘制过程费时费力的问题。
6.本发明的目的之四在于提供一种计算机程序产品,其能解决现有的镶嵌线绘制方法需要作业员通过对两幅及以上的影像进行对比查看,并根据地形、地貌、地物走势等情况综合研判镶嵌线的走向,整个绘制过程费时费力的问题。
7.本发明的目的之一采用以下技术方案实现:
8.一种镶嵌线的绘制方法,包括以下步骤:
9.s1、获取用户在底图影像上选定的初始起点和最后终点,将所述初始起点作为当前起点;
10.s2、根据预设终点计算参数以及所述当前起点确定当前终点,计算所述当前起点和所述当前终点对应当前方向矢量;
11.s3、以所述方向矢量在底图影像上选定对应的当前矩形搜寻范围,根据所述当前矩形搜索范围中剩余像素点与所述当前起点对应像素点之间的像素值差值以及剩余像素点与所述当前方向矢量的垂线距离确定当前矩形搜索范围内的当前镶嵌线绘制路线;
12.s4、根据预设绘制规则沿着所述当前镶嵌线绘制路线绘制对应的当前镶嵌线;
13.s5、将所述当前镶嵌线对应的实际终点作为新的当前起点,返回执行所述s2-s4步
骤,直至所述当前镶嵌线对应的当前终点与所述最后终点之间的距离在预设距离范围内。
14.进一步地,所述s3步骤中还包括根据预设机器学习噪点模型对所述当前矩形搜寻范围内进行影像噪声避让处理,得到噪声区域,将所述噪声区域内所有的像素点作为噪点像素点进行舍弃,所述剩余像素点不包括所述噪点像素点。
15.进一步地,所述s3步骤中还包括获取用户在所述当前矩形搜索范围内选定的点选噪点区域,将点选噪点区域实时添加至预设机器学习噪点模型对应的训练样本库中用于对预设机器学习噪点模型进行更新,得到更新后的预设机器学习噪点模型,使用更新后的预设机器学习噪点模型对所述当前矩形搜寻范围内进行影像噪声避让处理,去除对应的噪点像素点,所述剩余像素点不包括所述噪点像素点。
16.进一步地,在所述s5步骤之前还包括接收用户输入的操作指令,根据所述操作指令启动对应的操作功能。
17.进一步地,所述操作指令包括暂停、回退、调速指令中的一种或多种。
18.进一步地,所述根据所述当前矩形搜索范围中剩余像素点与所述当前起点对应像素点之间的像素值差值以及剩余像素点与所述当前方向矢量的垂线距离确定当前矩形搜索范围内的当前镶嵌线绘制路线具体包括以下步骤:
19.筛选当前镶嵌线绘制点,计算当前矩形搜索范围内中剩余像素点与所述当前起点对应像素点之间的像素值差值的绝对值,计算剩余像素点与所述当前方向矢量的垂线距离,将垂线距离与像素值差值的绝对值相加,得到每个剩余像素点对应当前综合分数,将当前综合分数最小的剩余像素点作为当前镶嵌线绘制点;
20.循环筛选,循环执行所述筛选当前镶嵌线绘制点步骤,在循环过程中将前一次所述筛选当前镶嵌线绘制点步骤中的当前镶嵌线绘制点不作为下一次所述筛选当前镶嵌线绘制点步骤中的剩余像素点。
21.进一步地,所述s4步骤具体为:沿着所述当前镶嵌线绘制路线以每秒100100px屏幕像素的速度进行镶嵌线的绘制,得到当前镶嵌线。
22.本发明的目的之二采用以下技术方案实现:
23.一种电子设备,包括:处理器;
24.存储器;以及程序,其中所述程序被存储在所述存储器中,并且被配置成由处理器执行,所述程序包括用于执行本技术中所述的一种镶嵌线的绘制方法。
25.本发明的目的之三采用以下技术方案实现:
26.一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行本技术中所述的一种镶嵌线的绘制方法。
27.本发明的目的之四采用以下技术方案实现:
28.一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现本技术中所述的一种镶嵌线的绘制方法。
29.相比现有技术,本发明的有益效果在于:本技术中的一种镶嵌线的绘制方法,根据预设终点计算参数以及所述当前起点确定当前终点,计算所述当前起点和所述当前终点对应当前方向矢量;以所述当前方向矢量在底图影像上选定对应的当前矩形搜寻范围,根据所述当前矩形搜索范围中剩余像素点与所述当前起点对应像素点之间的像素值差值以及剩余像素点与所述当前方向矢量的垂线距离确定当前矩形搜索范围内的当前镶嵌线绘制
路线;根据预设绘制规则沿着所述当前镶嵌线绘制路线绘制对应的当前镶嵌线;将所述当前镶嵌线对应的实际终点作为新的当前起点,返回前述步骤,直至所述当前镶嵌线对应的当前终点与所述最后终点之间的距离在预设距离范围内;整个过程无需通过对两幅及以上的影像进行对比查看,且减少人力输出,提高了镶嵌线的绘制效率。
30.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
附图说明
31.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
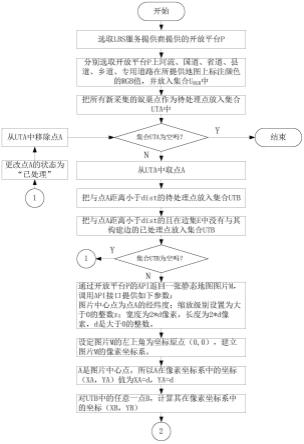
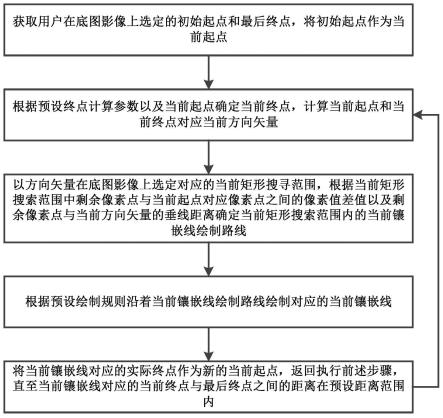
32.图1为本发明的一种镶嵌线的绘制方法的流程意图;
33.图2为本发明的一种镶嵌线的绘制方法中当前矩形搜寻范围的示意图。
具体实施方式
34.下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
35.如图1所示,本发明提供了一种镶嵌线的绘制方法,包括以下步骤:
36.s1、获取用户在底图影像上选定的初始起点和最后终点,将初始起点作为当前起点。
37.s2、根据预设终点计算参数以及当前起点确定当前终点,计算当前起点和当前终点之间对应的当前方向矢量。在本实施例中,在地图影像上建立二维坐标系,底图影像上每个像素点在二维坐标系中均对应唯一的坐标值,因此上述预设终点计算参数为:将当前起点的坐标值在横轴上增加第一预设数值,在纵轴上增加第二预设数值,最后得到一个新的坐标点,将新的坐标点作为当前终点,在每一次计算中上述第一预设数值与第二预设数值都是固定不变的,第一预设数值和第二预设数值可以相同或不同。
38.s3、以当前方向矢量在底图影像上选定对应的当前矩形搜寻范围,如图2所示,图2中从左上角到右下角的射线即为上述的当前方向矢量,图2中形成的矩形区域即为上述的当前矩形搜寻范围,根据当前矩形搜索范围中剩余像素点与当前起点对应像素点之间的像素值差值以及剩余像素点与当前方向矢量的垂线距离确定当前矩形搜索范围内的当前镶嵌线绘制路线,上述剩余像素点为当前矩形搜寻范围内除了当前起点之外的像素点,但是也包括以下两种情况,在以下两种情况时,剩余像素点为当前矩形搜寻范围内除去当前起点以及噪点像素点之外的像素点。上述两种情况具体为:
39.1、根据预设机器学习噪点模型对当前矩形搜寻范围内进行影像噪声避让处理,得到噪声区域,将噪声区域内所有的像素点作为噪点像素点进行舍弃,剩余像素点不包括噪点像素点。此时是对当前矩形搜寻范围内的噪点进行常规的去除,例如对有噪声云块、划痕、斑点污迹的区域进行避让以及去除,是这些区域的像素点不再作为剩余像素点参与计算。
40.2、在本实施例中,可以由用户自主选定不作为剩余像素点的区域,具体为:获取用户在当前矩形搜索范围内选定的点选噪点区域,将点选噪点区域实时添加至预设机器学习噪点模型对应的训练样本库中用于对预设机器学习噪点模型进行更新,得到更新后的预设机器学习噪点模型,使用更新后的预设机器学习噪点模型对当前矩形搜寻范围内进行影像噪声避让处理,去除对应的噪点像素点,剩余像素点不包括噪点像素点。
41.前述的根据当前矩形搜索范围中剩余像素点与当前起点对应像素点之间的像素值差值以及剩余像素点与当前方向矢量的垂线距离确定当前矩形搜索范围内的当前镶嵌线绘制路线具体包括以下步骤:
42.筛选当前镶嵌线绘制点,计算当前矩形搜索范围内中剩余像素点与当前起点对应像素点之间的像素值差值的绝对值,计算剩余像素点与当前方向矢量的垂线距离,将垂线距离与像素值差值的绝对值相加,得到每个剩余像素点对应当前综合分数,将当前综合分数最小的剩余像素点作为当前镶嵌线绘制点;
43.循环筛选,循环执行筛选当前镶嵌线绘制点步骤,在循环过程中将前一次筛选当前镶嵌线绘制点步骤中的当前镶嵌线绘制点不作为下一次筛选当前镶嵌线绘制点步骤中的剩余像素点。
44.s4、根据预设绘制规则沿着当前镶嵌线绘制路线绘制对应的当前镶嵌线。具体为:沿着当前镶嵌线绘制路线以每秒100100px屏幕像素的速度进行镶嵌线的绘制,得到当前镶嵌线。
45.s5、将当前镶嵌线对应的实际终点作为新的当前起点,返回执行s2-s4步骤,直至当前镶嵌线对应的当前终点与最后终点之间的距离在预设距离范围内。
46.本发明还提供一种电子设备,包括:处理器;
47.存储器;以及程序,其中程序被存储在存储器中,并且被配置成由处理器执行,程序包括用于执行本技术中的一种镶嵌线的绘制方法。
48.本发明还提供一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行本技术中的一种镶嵌线的绘制方法。
49.本发明还提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现本技术中的一种镶嵌线的绘制方法。
50.本技术中的一种镶嵌线的绘制方法,根据预设终点计算参数以及当前起点确定当前终点,计算当前起点和当前终点之间对应的当前方向矢量;以当前方向矢量在底图影像上选定对应的当前矩形搜寻范围,根据当前矩形搜索范围中剩余像素点与当前起点对应像素点之间的像素值差值以及剩余像素点与当前方向矢量的垂线距离确定当前矩形搜索范围内的当前镶嵌线绘制路线;根据预设绘制规则沿着当前镶嵌线绘制路线绘制对应的当前镶嵌线;将当前镶嵌线对应的实际终点作为新的当前起点,返回前述步骤,直至当前镶嵌线对应的当前终点与最后终点之间的距离在预设距离范围内;整个过程无需通过对两幅及以上的影像进行对比查看,且减少人力输出,提高了镶嵌线的绘制效率;而且在绘制过程中用户可以实时对绘制效果进行预览干涉,并可在绘制过程中暂停镶嵌线的绘制动作,实时添加噪声区域到机器学习的样本库中训练识别模型,并通过系统自动识别噪声区域,避开噪声区域继续进行镶嵌线的绘制,新的模式提升了原有纯人工判读的时间效率。
51.以上,仅为本发明的较佳实施例而已,并非对本发明作任何形式上的限制;凡本行
业的普通技术人员均可按说明书附图所示和以上而顺畅地实施本发明;但是,凡熟悉本专业的技术人员在不脱离本发明技术方案范围内,利用以上所揭示的技术内容而做出的些许更动、修饰与演变的等同变化,均为本发明的等效实施例;同时,凡依据本发明的实质技术对以上实施例所作的任何等同变化的更动、修饰与演变等,均仍属于本发明的技术方案的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。