1.本发明涉及湿度传感器技术领域,具体地,涉及一种无漂移湿度传感器。
背景技术:
2.湿度传感器广泛应用在室内温湿度监控,智能家居,白色家电,安防,农业等诸多领域,发挥了巨大作用。湿度传感器的实现原理有电阻式,电容式,质量称量式,干湿球式等。由于电容式和电阻式湿度传感器易于cmos工艺兼容,线性度好,湿度量程宽(0-100%rh)等优势,因此温湿度传感器芯片多用这两种实现方式,其中电容式使用最广泛。
3.然而采用聚合物作为湿敏材料的传感器,不论其采用电容式,电阻式,或者是压敏式等,由于聚合物的固有特性,必然会形成化学吸附水汽,且难以脱附,产生湿度漂移,尤其是高温高湿环境下,聚合物的长链空间位置膨胀,其湿度漂移特性更加明显。
4.为了解决湿度传感器的漂移特性,us9696272b2专利提出调节采样频率的方法来改善漂移特性;us4793175专利提出采用无机物作为湿敏材料的方案,抵抗漂移;同时也有大量文献提出改进的聚合物结构来改善这一问题。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种无漂移湿度传感器及其校准方法。
6.根据本发明提供的一种无漂移湿度传感器,包括:第一湿度传感器单元、第二湿度传感器单元以及分析处理单元,所述第一湿度传感器单元包括第一测量电极,以及覆盖在第一测量电极上的第一湿敏材料,所述第二湿度传感器单元包括第二测量电极,以及覆盖在所述第二测量电极上的第二湿敏材料,所述第一湿度传感器单元和所述第二湿度传感器单元的最大湿度漂移不同,所述分析处理单元对第一湿度传感器单元和第二湿度传感器单元的测量值进行校正并输出。
7.优选地,所述第一测量电极包括第一测量正极和第一测量负极,所述第一测量正极和第一测量负极上均设置有叉指电极;
8.所述第二测量电极由第二测量正极和第二测量负极组合而成,所述第二测量正极和第二测量负极上均设置有叉指电极,
9.所述叉指电极呈交错设置。
10.优选地,所述第一测量电极和所述第二测量电极为电容型电极;或者,所述第一测量电极和所述第二测量电极为电阻型电极。
11.优选地,所述第一测量电极和所述第二测量电极为电容型电极,在所述第一测量电极的一面与第一湿敏材料之间设置有钝化层,所述第一测量电极的另一面上依次设置有介质层和衬底硅片,且介质层填充在第一测量电极与衬底硅片之间;
12.所述第二测量电极的一面与第二湿敏材料之间设置有钝化层,所述第二测量电极的另二面上依次设置有介质层和衬底硅片,且介质层填充在第二测量电极与衬底硅片之
间。
13.优选地,所述第一测量电极和所述第二测量电极为电阻型电极,所述第一湿敏材料设置在第一测量电极的一面,所述第一测量电极的另一面上依次设置有介质层和衬底硅片,且介质层填充在第一测量电极与衬底硅片之间;
14.所述第二湿敏材料设置在第二测量电极的一面,所述第二测量电极的另一面上依次设置有介质层和衬底硅片,且介质层填充在第二测量电极与衬底硅片之间。
15.优选地,针对电容式电极,所述第一湿敏材料和第二湿敏材料为光敏性湿敏材料或非光敏性湿敏材料,所述第一湿敏材料和所述第二湿敏材料的加工方法包括:
[0016]-若第一湿敏材料和第二湿敏材料均为光敏性湿敏材料,采用直接光刻的方式得到图形;
[0017]-若第一湿敏材料或第二湿敏材料中的一个为非光敏湿敏材料,加工方法包括:
[0018]
步骤s1.1:在第一测量电极和第二测量电极的钝化层上旋涂非光敏湿敏材料并固化,然后在非光敏性湿敏材料上旋涂光刻胶,并光刻出所需的图形,再通过干法蚀刻的工艺加工,最后去除光刻胶,完成一种湿敏材料的加工;
[0019]
步骤s1.2:旋涂光敏性湿敏材料,通过光刻的方式图形化,并固化光敏性湿敏材料,得到另一种湿敏材料;
[0020]-若第一湿敏材料和第二湿敏材料均为非光敏性湿敏材料,加工方法包括:
[0021]
步骤s2.1:在两个测量电极的钝化层上旋涂第一湿敏材料并固化,且所述第一湿敏材料的厚度大于一倍以上叉指电极的宽度和边距之和,然后在第一光敏性湿敏材料上旋涂光刻胶,并光刻出所需的图形,再通过干法蚀刻的工艺加工,最后去除光刻胶,完成第一湿敏材料的加工;
[0022]
步骤s2.2:旋涂第二湿敏材料并固化,然后在第二湿敏材料上旋涂光刻胶,并光刻出所需的图形,在通过干法蚀刻的工艺加工,保留第一湿敏材料上附着的第二湿敏材料,最后去除光刻胶,完成第二湿敏材料的加工。
[0023]
优选地,针对电阻式电极,所述第一湿敏材料和第二湿敏材料为光敏性湿敏材料;或所述第一湿敏材料和第二湿敏材料中的任意一种为非光敏性湿敏材料,另一种为光敏性湿敏材料;所述第一湿敏材料和所述第二湿敏材料的加工方法包括:
[0024]-若第一湿敏材料和第二湿敏材料均为光敏性湿敏材料,采用直接光刻的方式得到图形;
[0025]-若第一湿敏材料或第二湿敏材料中的一个为非光敏湿敏材料,加工方法为:
[0026]
步骤s3.1:在第一测量电极和第二测量电极上旋涂非光敏湿敏材料并固化,然后在非光敏性湿敏材料上旋涂光刻胶,并光刻出所需的图形,再通过干法蚀刻的工艺加工,最后去除光刻胶,完成一种湿敏材料的加工;
[0027]
步骤s3.2:旋涂光敏性湿敏材料,通过光刻的方式图形化,并固化光敏性湿敏材料,得到另一种湿敏材料;
[0028]-若第一湿敏材料和第二湿敏材料均为非光敏性湿敏材料,加工方法包括:
[0029]
步骤s4.1:在第一测量电极和第二测量电极上旋涂第一非光敏湿敏材料并固化,然后在非光敏性湿敏材料上旋涂光刻胶,并光刻出所需的图形,再通过干法蚀刻的工艺加工,最后去除光刻胶,完成一种湿敏材料的加工;
[0030]
步骤s4.2:旋涂第二非光敏性湿敏材料,然后再旋涂光刻胶,通过光刻的方式图形化,接着利用碱性显影液(tmah)在光刻胶显影的同时,腐蚀第二非光敏性材料,去除光刻胶后对第二湿敏材料固化,得到另一种湿敏材料;
[0031]
优选地,所述湿度传感器采用差分式采样结构,其中,所述第一湿度传感器单元包括第一传感子单元和第二传感子单元,所述第二湿度传感器单元包括第三传感子单元和第四传感子单元。
[0032]
与现有技术相比,本发明具有如下的有益效果:
[0033]
1、本发明的湿度传感器能够有效解决一般电容湿度传感器或电阻式湿度传感器漂移的问题;
[0034]
2、针对不同材料的湿敏材料采用相应的加工方法,适用性较高。
附图说明
[0035]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0036]
图1为本发明湿度传感器中叉指电容示意图;
[0037]
图2为本发明湿度传感器中湿敏材料截面示意图;
[0038]
图3为本发明电容式传感器第一湿度传感器单元剖视图;
[0039]
图4为本发明电容式传感器第二湿度传感器单元剖视图;
[0040]
图5为本发明中采用两种非光敏性湿敏材料时第一湿度传感器单元的剖视图;
[0041]
图6为本发明中电阻式传感器的剖视图;
[0042]
图7为本发明差分式采样结构湿度传感器叉指电容示意图;
[0043]
图8为本发明湿度传感器校准方法流程图。
[0044]
附图标记说明:
[0045]
第一测量电极101
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二测量电极102
[0046]
第一测量正极1011
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二测量正极1021
[0047]
第一测量负极1012
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二测量负极1022
[0048]
第一湿敏材料201
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二湿敏材料202
[0049]
钝化层211
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
介质层213
[0050]
叉指电极212
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
衬底硅片214
[0051]
第一传感子单元111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二传感子单元112
[0052]
第三传感子单元113
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第四传感子单元114
[0053]
第一子单元正极1111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一子单元负极1112
[0054]
第二子单元正极1121
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二子单元负极1122
[0055]
第三子单元正极1131
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三子单元负极1132
[0056]
第四子单元正极1141
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第四子单元负极1142
具体实施方式
[0057]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术
人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0058]
平面式湿度传感器,包括电容式湿度传感器和电阻式湿度传感器,一般在硅片或者asic晶片上设置叉指结构,接着在叉指电极上涂敷一层湿敏材料,进而实现湿敏电容的检测。而后端的电路检测一般分为单端结构和差分结构,单端结构采样的是单个电极,差分结构采样的是两个对称的电极。
[0059]
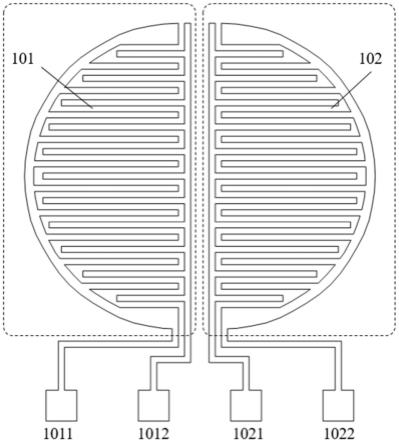
本发明公开一种无漂移湿度传感器,参照图1和图2,包括:第一湿度传感器单元、第二湿度传感器单元以及分析处理单元,所述第一湿度传感器单元包括第一测量电极101,以及覆盖在第一测量电极101上的第一湿敏材料201,所述第二湿度传感器单元包括第二测量电极102,以及覆盖在所述第二测量电极102上的第二湿敏材料202,所述第一湿度传感器单元和所述第二湿度传感器单元的最大湿度漂移不同,所述分析处理单元对第一湿度传感器单元和第二湿度传感器单元的测量值进行校正并输出。
[0060]
参照图3,第一测量电极101包括第一测量正极1011和第一测量负极1012,所述第一测量正极1011和第一测量负极1012上均设置有叉指电极212;
[0061]
参照图4,所述第二测量电极102由第二测量正极1021和第二测量负极1022组合而成,所述第二测量正极1021和第二测量负极1022上均设置有叉指电极212,所述叉指电极212呈交错设置。
[0062]
所述第一测量电极101和所述第二测量电极102为电容型电极;或者,所述第一测量电极101和所述第二测量电极102为电阻型电极。
[0063]
下面针对采用电容性电极的情况进行详细说明。
[0064]
在第一测量电极101的一面与第一湿敏材料201之间设置有钝化层211,所述第一测量电极101的另一面上依次设置有介质层213和衬底硅片214,且介质层213填充在第一测量电极101与衬底硅片214之间。
[0065]
在所述第二测量电极102的一面与第二湿敏材料202之间设置有钝化层211,所述第二测量电极102的另二面上依次设置有介质层213和衬底硅片214,且介质层213填充在第二测量电极102与衬底硅片214之间。
[0066]
所述第一湿敏材料201和第二湿敏材料202为光敏性湿敏材料或非光敏性湿敏材料,所述第一湿敏材料201和所述第二湿敏材料202的加工方法根据材料的不同分为以下几种情形:
[0067]-若第一湿敏材料201和第二湿敏材料202均为光敏性湿敏材料,采用直接光刻的方式得到图形;
[0068]-若第一湿敏材料201或第二湿敏材料202中的一个为非光敏性湿敏材料,加工方法包括:
[0069]
步骤s1.1:在第一测量电极101和第二测量电极102的钝化层211上旋涂非光敏性湿敏材料并固化,然后再非光敏性湿敏材料上旋涂光刻胶,并光刻出所需的图形,再通过干法蚀刻的工艺加工,最后去除光刻胶,完成一种湿敏材料的加工;
[0070]
步骤s1.2:旋涂光敏性湿敏材料,通过光刻的方式图形化,并固化光敏性湿敏材料,得到另一种湿敏材料;
[0071]-若第一湿敏材料201和第二湿敏材料202均为非光敏性湿敏材料,加工方法包括:
[0072]
步骤s2.1:在两个测量电极的钝化层211上旋涂第一湿敏材料201并固化,然后在第一光敏性湿敏材料上旋涂光刻胶,并光刻出所需的图形,再通过干法蚀刻的工艺加工,最后去除光刻胶,完成第一湿敏材料201的加工;
[0073]
步骤s2.2:旋涂第二湿敏材料202并固化,然后在第二光敏性湿敏材料上旋涂光刻胶,并光刻出所需的图形,在通过干法蚀刻的工艺加工,保留第一光敏性湿敏材料上附着的第二光敏性湿敏材料,最后去除光刻胶,完成第二湿敏材料202的加工。
[0074]
当第一湿敏材料201和第二湿敏材料202均为非光敏性湿敏材料时,问题将变得复杂,加工第一湿敏材料201的方法仍然不变,但是,如果同样采用干法刻蚀加工第二湿敏材料202,那么因为干法刻蚀对于第一湿敏材料201和第二湿敏材料202没有任何选择性,导致去除第二湿度传感器单元以外区域的第二湿敏材料202时,第一湿度传感器单元区域内的的第一湿敏材料201因为过刻蚀,也会发生厚度损失。然而,幸运的是,我们并不一定需要去除第一湿敏材料201上的第二湿敏材料202。参照图5,即第一传感单元上可以保留第二湿敏材料202,这样在工艺集成上就大大减少了冲突。但是这种方案需要保证一个前提,第一湿敏材料201的厚度要大于1倍以上的叉指电极212的铝条线宽和边间距之和,这样电容器的电场线将不会或仅有极少量会穿过第二湿敏材料202,如图5所示,降低第一湿敏材料201和第二湿敏材料202之间的串扰。
[0075]
下面对电阻性电极进行详细说明。
[0076]
参照图6,所述第一湿敏材料201设置在第一测量电极101的一面,所述第一测量电极101的另一面上依次设置有介质层213和衬底硅片214,且介质层213填充在第一测量电极101与衬底硅片214之间。
[0077]
所述第二湿敏材料202设置在第二测量电极102的一面,所述第二测量电极102的另一面上依次设置有介质层213和衬底硅片214,且介质层213填充在第二测量电极102与衬底硅片214之间。
[0078]
所述第一湿敏材料201和第二湿敏材料202为光敏性湿敏材料;或所述第一湿敏材料201和第二湿敏材料202中的任意一种为非光敏性湿敏材料,另一种为光敏性湿敏材料;所述第一湿敏材料201和所述第二湿敏材料202的加工方法包括:
[0079]-若第一湿敏材料201和第二湿敏材料202均为光敏性湿敏材料,采用直接光刻的方式得到图形;
[0080]-若第一湿敏材料201或第二湿敏材料202中的一个为非光敏湿敏材料,加工方法为:
[0081]
步骤s3.1:在第一测量电极101和第二测量电极102上旋涂非光敏湿敏材料并固化,然后在非光敏性湿敏材料上旋涂光刻胶,并光刻出所需的图形,再通过干法蚀刻的工艺加工,最后去除光刻胶,完成一种湿敏材料的加工;
[0082]
步骤s3.2:旋涂光敏性湿敏材料,通过光刻的方式图形化,并固化光敏性湿敏材料,得到另一种湿敏材料;
[0083]-若第一湿敏材料201和第二湿敏材料202均为非光敏性湿敏材料,加工方法包括:
[0084]
步骤s4.1:在第一测量电极101和第二测量电极102的上旋涂第一非光敏湿敏材料并固化,然后在非光敏性湿敏材料上旋涂光刻胶,并光刻出所需的图形,再通过干法蚀刻的工艺加工,最后去除光刻胶,完成一种湿敏材料的加工;
[0085]
步骤s4.2:旋涂第二非光敏性湿敏材料,然后再旋涂光刻胶,通过光刻的方式图形化,接着利用碱性显影液(tmah)在光刻胶显影的同时,腐蚀第二非光敏性材料,去除光刻胶后对第二湿敏材料固化,得到另一种湿敏材料;
[0086]
针对电阻式电极,若在叉指电极上同时堆叠覆盖第一湿敏材料和第二湿敏材料,第一湿敏层和第二湿敏层形成并联关系,测量的湿敏电阻将是第一湿敏材料和第二湿敏材料综合的结果,从而对湿度测量单元的结果产生影响,因此在加工电阻式电极上的湿敏材料时,第一湿敏材料和第二湿敏材料不能均采用非光敏性湿敏材料。然而,针对电容式电极,由于电场线的穿越高度有限,因此允许出现第一湿敏材料和第二湿敏材料堆叠的情形出现。此时满足第一湿敏材料201的厚度大于1倍以上的叉指电极212的铝条线宽和边间距之和。
[0087]
以上是针对单端结构的湿度传感器的方案,如果asic电路采用的是差分式采样结构,对于传感器件端的第一湿度传感器单元和第二湿度传感器单元也需要设计成差分对的形式。参照图7,其中包括第一传感子单元111,第二传感子单元112,第三传感子单元113为第三传感单元以及第四传感子单元114;其中,第一传感子单元111包括第一子单元正极1111和第一子单元负极1112;第二传感子单元112包括第二子单元正极1121和第二子单元负极1122;第三传感子单元113包括第三子单元正极1131和第三子单元负极1132;第四传感子单元114包括第四子单元正极1141和第四子单元负极1142。对于本发明所需的第一湿度传感器单元和第二湿度传感器单元,其可以由任意两个传感子单元进行组合得到。但是由于实际版图需要较高的匹配,一般来说,第一湿度传感器单元由第一传感子单元111和第四传感子单元114组合,第二湿度传感器单元由第二传感子单元112和第三传感子单元113组合。在后续涂敷湿敏材料时同前述方案一致。
[0088]
本发明公开一种无漂移湿度传感器校正方法,分析处理单元在接收到第一湿度传感器单元和第二湿度传感器单元所测量的结果时,对两个结果进行误差计算,最终生成准确的湿度值,具体的校准过程参照图8,包括以下步骤:
[0089]
步骤s1:获取第一湿度传感器单元和第二湿度传感器单元的湿度最大漂移特性与环境湿度的关系,计算第一湿度传感器单元和第二湿度传感器单元的最大漂移差值。
[0090]
首先,通过小批量的试验数据,分别研究出第一湿度传感器单元和第二湿度传感器单元的湿度最大漂移特性与环境湿度的关系,其通用性回归关系可以用关于环境湿度的一阶方程表示,如式1和2表示。最大漂移可以通过诸如85℃85%rh试验,或者hast试验等进行加速老化一定时间,使传感器的漂移达到稳定。通常来说,测试时,低湿下湿度漂移值较小,中湿时漂移值中等,高湿时漂移值最大,呈现出与当前测试环境湿度的相关性。部分聚合物材料也会表现出良好的全湿度量程下的线性漂移,即一阶项为0。我们将第一湿度传感器单元和第二湿度传感器单元的最大漂移值作差,得到式3,作为后续的参比量。
[0091]
rh_drift
max_a
=αrh a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0092]
rh_drift
max_b
=βrh b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0093]
δrh_drift
max
=(β-α)rh (b-a)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0094]
步骤s2:将第一湿度传感器单元和第二湿度传感器单元的电容值与实测rh值进行回归拟合,得到第一拟合方程和第二拟合方程。
[0095]
将第一湿度传感器单元和第二湿度传感器单元进行校准,建立起“环境湿度——
湿度电容或湿度电阻——adc数字量——读取湿度值”的对应关系。一般来说二阶拟合能满足大多数的传感器的精度的需求,如式4和5所示;当然根据数字电路的设计能力或传感器件的需求,可以采用诸如三阶以上的回归拟合。完成该步骤后,第一湿度传感器单元和第二湿度传感器单元将能独立测得各自的湿度值。
[0096][0097][0098]
步骤s3:获取某一湿度环境下,第一湿度传感器单元和第二湿度传感器单元的湿度值,并计算第一湿度传感器单元和第二湿度传感器单元的实际湿度差,并将实际湿度差与最大漂移差值类比。
[0099]
当处在某一环境湿度rh时,第一湿度传感器单元和第二湿度传感器单元将分别读出rha和rhb两个湿度值,此时我们得到两者的差值,如式6所示:
[0100]
δrh=rh
b-rhaꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0101]
步骤s4:将第一湿度传感器单元和第二湿度传感器单元的实际湿度差与第一湿度传感器单元最大漂移特性与环境湿度的关系以及第二湿度传感器单元湿度最大漂移特性与环境湿度的关系类比,得到当前湿度环境下第一湿度传感器单元的湿度漂移量,以及第二湿度传感器单元的湿度漂移量。
[0102]
将式6与式1或者式2进行类比,我们可以得到当前湿度环境下传感单元a和b的湿度漂移量,分别如式7和8所示。
[0103][0104][0105]
步骤s5:根据第一拟合方程和第二拟合方程,以及步骤s4中的第一湿度传感器单元的湿度漂移量,第二湿度传感器单元的湿度漂移量,分别建立关于真实湿度值rh的方程。
[0106]
根据式4、5实测的rh值和7、8的漂移补偿值能够分别建立关于真实湿度值rh的方程,如式9和10所示。
[0107]
rh=rh
a-rh_driftaꢀꢀꢀꢀꢀꢀꢀ
(9)
[0108]
rh=rh
b-rh_driftbꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0109]
步骤s6:根据步骤s5中的真实湿度值rh的方程,建立第一湿度传感器单元关于rh的二阶方程以及第二湿度传感器单元关于rh的二阶方程。
[0110]
根据式9和式10,均能得到关于rh的二阶方程,两个方程都能求出关于真实rh的值,如式11和12所示。理论上如果传感单元a和传感单元b的漂移速率相当,那么传感单元a和b求出的rh值应该相等,取任意一个值均可。但是实际很难有这样的理想状况,诸如同种材料的个体差异,不同材料的漂移速率差异等问题,需要增加判别,以增加数据的可信度。
[0111]
rh_reala=fa(rha,rhb)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0112]
rh_realb=fb(rha,rhb)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0113]
步骤s7:根据第一湿度传感器单元关于rh的二阶方程以及第二湿度传感器单元关于rh的二阶方程的差值分别权重,完成校正流程。
[0114]
最后,我们对传感单元a和b求出的真实rh值进行权重分配,当两者之间的差值小
于某一设定阈值时,γ和δ可以取0.5;当两者之间的差值超过设定阈值时,取其中置信度更高的传感单元作为主传感单元,分配更高的权重;这样我们最终可以得到全生命周期无漂移的湿度传感器。
[0115]
rh=γrh_reala δrh_realbꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0116]
在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0117]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。